控制工程基础 第二章 控制系统传递函数推导举例(第六讲)
- 格式:ppt
- 大小:1.01 MB
- 文档页数:20

控制工程基础第二章控制系统传递函数推导举例嘿,大家好!今天咱们聊聊控制系统传递函数的推导。
可能有小伙伴会觉得:哎呀,这听起来很高深啊!其实不用担心,咱们就把它当成一种“魔法”来聊,保证你看懂了还觉得有趣。
大家都知道,控制系统就像是你家的空调,或者你车里的自动驾驶系统,它们都是通过某种方式“控制”你想要的目标,调节着温度、速度啥的。
而这个“控制”背后的原理,常常就是传递函数。
咱们今天就来拆解这个“神秘的传递函数”,看看它究竟是怎么来的,别怕,咱们一步步来,轻松愉快地搞定。
咱们得明白一个事情,什么叫控制系统的传递函数。
你想象一下,你开车,踩油门,车速开始变快,对吧?油门和车速之间的关系就可以通过传递函数来表示。
这个函数就告诉你,输入的油门大小会如何影响到输出的车速。
比如,油门踩了30%和踩了70%,车速变化的幅度是不一样的,这就是控制系统的“响应”。
传递函数就是描述这种输入与输出之间关系的数学工具,简单点说,它告诉你“输入多少,输出多少”的一个规律。
那传递函数怎么来呢?这就得讲讲拉普拉斯变换了。
别急,拉普拉斯变换其实不难,它就像是个“超级变压器”,能把复杂的时间域问题转换成比较简单的频率域问题,简化计算。
你想,咱们从时间域跳到频率域,就好像从三维空间跳到二维平面,一下子就好理解多了。
你现在是不是觉得拉普拉斯变换就像是一剂神奇的“解药”呢?哈哈,别着急,咱们往下说。
一般来说,控制系统的推导步骤差不多都可以分为两大部分:建模和求传递函数。
啥叫建模呢?简单来说,就是先给系统做个“影像图”,把系统的各个部件之间的关系搞明白。
比如说,车的油门、发动机、车轮之间怎么互动,反正你得先把这些“元素”都搞清楚。
然后,你就可以通过这些元素的物理特性来写出一堆数学方程。
这些方程就是系统的动态模型,它们描述了输入和输出之间的关系。
不过,建模归建模,咱们得回过头来聊传递函数。
传递函数就是你把这个系统的方程化简后的结果,通常用大写字母“G”来表示。
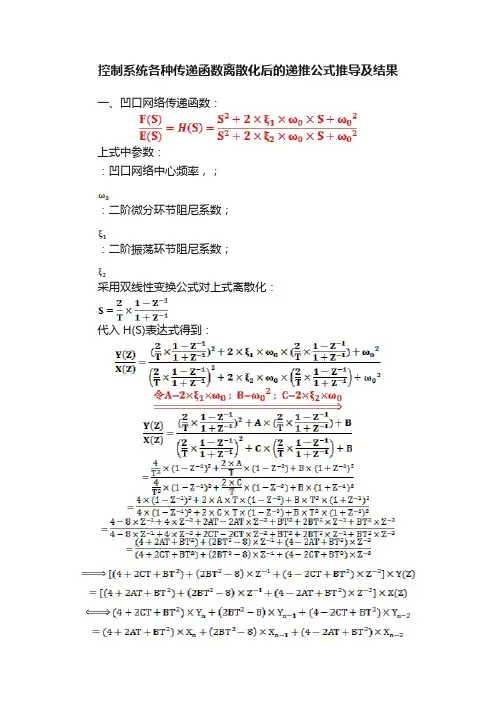
控制系统各种传递函数离散化后的递推公式推导及结果一、凹口网络传递函数:上式中参数::凹口网络中心频率,;:二阶微分环节阻尼系数;:二阶振荡环节阻尼系数;采用双线性变换公式对上式离散化:代入H(S)表达式得到:迭代公式:;;*************************************************************** ********************** 二、PI调节器采用双线性变换公式对上式离散化:代入H(S)表达式得到:迭代公式:*************************************************************** ********************** 三、滞后-超前调节器采用双线性变换公式对上式离散化:代入H(S)表达式得到:迭代公式:*************************************************************** ********************** 四、PID 调节器(形式1)参数::一阶微分环节时间常数(第二转折频率);:一阶微分环节时间常数;:一阶惯性环节时间常数;K:PID调节器放大系数。
采用双线性变换公式对上式离散化:代入H(S)表达式得到:迭代公式:;;*************************************************************** ********************** 五、PID 调节器(形式2)采用双线性变换公式对上式离散化:代入H(S)表达式得到:迭代公式:;;*************************************************************** ********************** 六、I型系统期望特性假设一系统的原始开环传递函数为:它的波特图如下图:现对其增加串联迟后校正(近似PI控制器)环节:它的波特图如下:校正后的系统开环传递函数为:1.I型系统期望特性I型系统特点:系统的正向通道(即主通道)包含1个纯积分环节。