机器人操作的数学导论——刚体运动(1——3)讲解
- 格式:ppt
- 大小:1.65 MB
- 文档页数:19
第三章刚体力学§3.1 刚体运动的分析§ 3.2 角速度矢量§3.3 刚体运动微分方程§ 3.4 刚体平衡方程§3.5 转动惯量§ 3.6 刚体的平动与定轴转动§3.7 刚体的平面平行运动§3.1 刚体运动的分析一、描述刚体位置的独立变量1. 刚体是特殊质点组dr ij =0, 注意 : 它是一种理想模型, 形变大小可忽略时可视为刚体。
2. 描述刚体位置的独立变数描述一个质点需(x,y,z),对刚体是否用3n 个变量?否 , 由于任意质点之间的距离不变如确定不在同一直线上的三点, 即可确定刚体的位置, 需 9 个变量,由于两点间的距离保持不变,所以共需9-3=6 个变量即可。
刚体的任意运动=质心的平动 +绕质心的转动,描述质心可用(x,y,z),描述转轴可由αβ, γ。
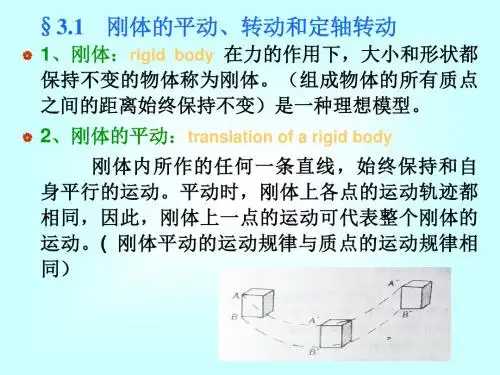
, ,二、刚体的运动分类1. 平动:刚体在运动过程中,刚体上任意直线始终平行.任意一点均可代表刚体的运动,通常选质心为代表. 需要三个独立变量, 可以看成质点力学问题.( 注意 : 平动未必是直线运动)2.定轴转动 : 刚体上有两点不动 , 刚体绕过这两点的直线转动 , 该直线为转轴 . 需要一个独立变量φ3.平面平行运动 : 刚体上各点均平行于某一固定平面运动。
可以用平行于固定平面的截面代表刚体。
需要三个独立变量。
4.定点运动 : 刚体中一点不动 , 刚体绕过固定点的瞬转转动。
需三个独立的欧拉角。
5.一般运动 : 平动 +转动§3.2角速度矢量定轴转动时角位移用有向线段表示 , 右手法确定其方向 . 有向线段不一定是矢量 , 必须满足平行四边形法则 , 对定点转动时 , 不能直接推广 , 因不存在固定轴 .ωlim n dnt dt 刚体在 dt 时间内转过的角位移为d n,则角速度定义为t 0角速度反映刚体转动的快慢。
Q dr dn r , v dr ωr线速度与角速度的关系:dt§3.3刚体运动微分方程一、基础知识1. 力系:作用于刚体上里的集合。
刚体运动知识点总结刚体运动是物理学中的一个重要研究领域,它涉及到力学、动力学等多个方面的知识。
在学习刚体运动的过程中,我们需要了解刚体的运动方式、刚体的平动和转动运动、刚体的运动方程、刚体动力学等知识点。
下面将针对这些知识点进行详细的总结和讨论。
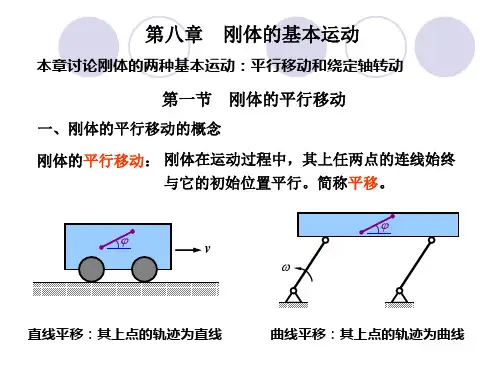
一、刚体的运动方式刚体可以进行平动运动和转动运动。
在平动运动中,刚体上所有的点都以相同的速度和相同的方向运动。
在转动运动中,刚体绕着固定轴线旋转,使得刚体上的各个点绕着这个轴线做圆周运动。
刚体的平动运动可以分为匀速直线运动和变速直线运动两种情况。
在匀速直线运动中,刚体上各个点的速度大小和方向都保持不变;在变速直线运动中,刚体上各个点的速度大小和方向都在不断地变化。
刚体的转动运动可以分为定轴转动和不定轴转动两种情况。
在定轴转动中,刚体绕着固定的轴线旋转,而在不定轴转动中,刚体绕着移动的轴线旋转。
二、刚体的平动运动在学习刚体的平动运动时,我们通常关心刚体上各点的速度、加速度和位移等动力学量。
1. 速度:刚体上任意一点的速度可以表示为该点的瞬时线速度,即该点的位矢对时间的导数。
刚体上不同点的速度大小和方向可以不同,但它们的速度矢量之间满足相对运动关系。
2. 加速度:刚体上任意一点的加速度可以表示为该点的瞬时线加速度,即该点的速度对时间的导数。
刚体上不同点的加速度大小和方向可以不同,但它们的加速度矢量之间满足相对运动关系。
3. 位移:刚体上任意一点的位移可以表示为该点的位矢的变化量。
刚体上不同点的位移可以通过相对位移关系来描述。
刚体的平动运动可以通过运动方程来描述,其中包含了刚体上不同点的速度、加速度和位移之间的关系。
在解决刚体平动问题时,我们通常会使用牛顿运动定律和动量定理等知识来进行分析和求解。
三、刚体的转动运动在学习刚体的转动运动时,我们需要了解刚体绕着固定轴线旋转的运动规律,以及刚体上各点的角速度、角加速度和角位移等动力学量。
1. 角速度:刚体上任意一点的角速度可以表示为该点的瞬时角位置对时间的导数。
第三章 刚体力学§3.1 刚体运动的分析 §3.2 角速度矢量 §3.3 刚体运动微分方程 §3.4 刚体平衡方程 §3.5 转动惯量 §3.6 刚体的平动与定轴转动 §3.7刚体的平面平行运动§3.1 刚体运动的分析 一、描述刚体位置的独立变量1.刚体是特殊质点组dr ij =0,注意:它是一种理想模型,形变大小可忽略时可视为刚体。
2.描述刚体位置的独立变数描述一个质点需(x,y,z), 对刚体是否用3n 个变量?否,由于任意质点之间的距离不变,如确定不在同一直线上的三点,即可确定刚体的位置,需9个变量,由于两点间的距离保持不变,所以共需9-3=6个变量即可。
刚体的任意运动=质心的平动+绕质心的转动,描述质心可用(x,y,z), 描述转轴可由α,β,γ。
二、刚体的运动分类1.平动:刚体在运动过程中,刚体上任意直线始终平行.任意一点均可代表刚体的运动,通常选质心为代表.需要三个独立变量,可以看成质点力学问题.(注意:平动未必是直线运动)2.定轴转动: 刚体上有两点不动,刚体绕过这两点的直线转动,该直线为转轴. 需要一个独立变量φ3.平面平行运动: 刚体上各点均平行于某一固定平面运动。
可以用平行于固定平面的截面代表刚体。
需要三个独立变量。
4.定点运动: 刚体中一点不动,刚体绕过固定点的瞬转转动。
需三个独立的欧拉角。
5.一般运动: 平动+转动 §3.2 角速度矢量定轴转动时角位移用有向线段表示,右手法确定其方向.有向线段不一定是矢量,必须满足平行四边形法则,对定点转动时,不能直接推广,因不存在固定轴.刚体在dt 时间内转过的角位移为d n ,则角速度定义为0limt d t dt ∆→∆==∆n nω角速度反映刚体转动的快慢。
线速度与角速度的关系:,t d d d d =⨯⨯∴==rv r n r ωr Q§3.3 刚体运动微分方程 一、 基础知识1.力系:作用于刚体上里的集合。