理论力学 第6章
- 格式:ppt
- 大小:1.35 MB
- 文档页数:34
![理论力学第六章 点的合成运动 [同济大学]](https://uimg.taocdn.com/63fd0a4dbe1e650e53ea9909.webp)
·1·第6章 点的合成运动6.1 主要内容6.1.1 点的绝对运动、相对运动和牵连运动1.定系和动系若存在两个有相对运动的坐标系,则可指定其中一个为定系,另一个即为动系。
但工程上一般以固定在地面上的坐标系为定系,相对于定系运动着的坐标系称为动系。
2.动点和牵连点动点为研究的对象,牵连点是动点在动系上的重合点,随动点的相对运动而变,是动系上的点,不同瞬时,有不同的牵连点。
3.三种运动的关系动点相对于定系的运动定义为绝对运动;动点相对于动系的运动定义为相对运动;动系相对于定系的运动定义为牵连运动。
本章的主要任务就是建立这三者之间的定量关系,从而用来解决工程实际某些运动分析问题。
6.1.2 点的速度合成定理动点的绝对速度等于它的牵连速度与相对速度的矢量和。
这就是点的速度合成定理。
a e r =+v v v6.1.3 牵连运动为平移时,点的加速度合成定理当牵连运动为平移时,动点的绝对加速度等于牵连加速度与相对加速度的矢量和。
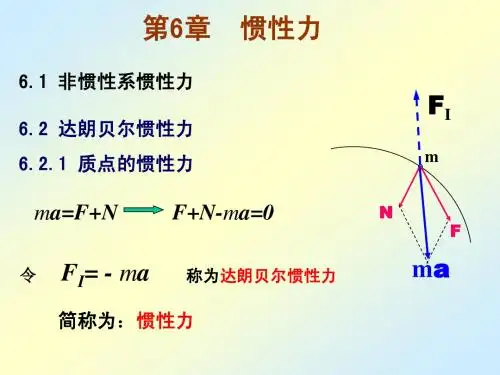
a e r =+a a a6.1.4 牵连运动为转动时,点的加速度合成定理当牵连运动为转动时,动点的绝对加速度等于牵连加速度、相对加速度与科氏加速度的矢量和,这就是牵连运动为转动时点的加速度合成定理。
a e r C =++a a a a其中r C v a ⨯=ω2。
当取平动动系时0=e ω;0=C a 。
6.2 基本要求1.掌握运动合成与分解的基本概念和方法,准确理解本章阐述的若干概念。
2.明确动点与动系的选择原则,能在具体问题中恰当地选择动点与动系,并正确地分析三种运动。
3.熟练掌握点的速度合成定理和牵连运动为平动时的加速度合成定理及其应用。
4.掌握科氏加速度的概念和计算,准确应用牵连运动为转动时的加速度合成定理及其应用。
6.3 重点讨论应用点的合成运动理论解决实际问题时,其关键是正确地选择动点和动系。
选择原则因具体情况不同而略有区别。
常见的问题有三种题型。
1.两个独立运动的物体,研究两者的相对运动。