理论力学课后知识题目解析第6章刚体的平面运动分析
- 格式:doc
- 大小:347.62 KB
- 文档页数:10
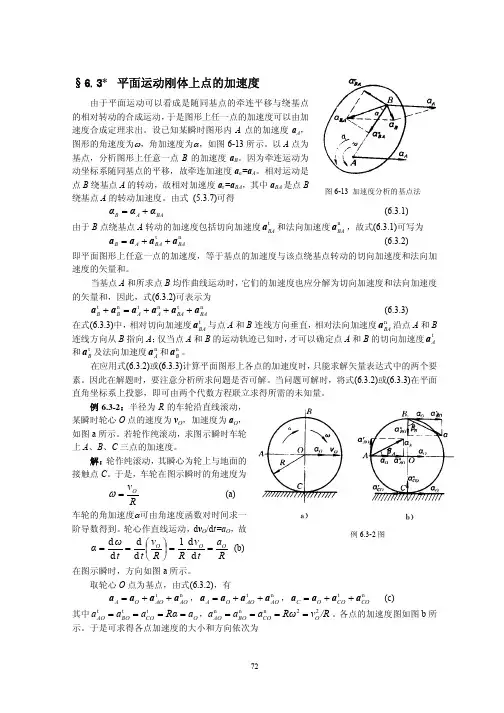
§6.3* 平面运动刚体上点的加速度由于平面运动可以看成是随同基点的牵连平移与绕基点的相对转动的合成运动,于是图形上任一点的加速度可以由加速度合成定理求出。
设已知某瞬时图形内A 点的加速度a A ,图形的角速度为ω,角加速度为α,如图6-13所示。
以A 点为基点,分析图形上任意一点B 的加速度a B 。
因为牵连运动为动坐标系随同基点的平移,故牵连加速度a e =a A 。
相对运动是点B 绕基点A 的转动,故相对加速度a r =a BA ,其中a BA 是点B 绕基点A 的转动加速度。
由式 (5.3.7)可得图6-13 加速度分析的基点法 α (6.3.1) BA A B αα+=由于B 点绕基点A 转动的加速度包括切向加速度和法向加速度a ,故式(6.3.1)可写为t BA a n BAa (6.3.2) n t BA BA A B a a a ++=即平面图形上任意一点的加速度,等于基点的加速度与该点绕基点转动的切向加速度和法向加速度的矢量和。
当基点A 和所求点B 均作曲线运动时,它们的加速度也应分解为切向加速度和法向加速度的矢量和,因此,式(6.3.2)可表示为(6.3.3)n t n t n t BA BA A A B B a a a a a a +++=+在式(6.3.3)中,相对切向加速度与点A 和B 连线方向垂直,相对法向加速度沿点A 和B连线方向从B 指向A ;仅当点A 和B 的运动轨迹已知时,才可以确定点A 和B 的切向加速度a 和及法向加速度和a 。
t BA a n BA a t A t B a n A a n B 在应用式(6.3.2)或(6.3.3)计算平面图形上各点的加速度时,只能求解矢量表达式中的两个要素。
因此在解题时,要注意分析所求问题是否可解。
当问题可解时,将式(6.3.2)或(6.3.3)在平面直角坐标系上投影,即可由两个代数方程联立求得所需的未知量。
例6.3-2:半径为R 的车轮沿直线滚动,某瞬时轮心O 点的速度为v O ,加速度为a O ,如图a 所示。
第六章 分析力学滔滔长江东逝水,浪花淘尽英雄。
达朗贝尔,拉格朗日,哈密顿等许多前贤相聚于此“力学论剑”,其“冲击波”使非线性问题也不攻自破。
长江后浪推前浪,你或许在此能够加倍“忘乎因此‘。
微分方程将叱咤风云。
[要点分析与总结]1虚功原理:(平稳时)理想条件下,力学系的平稳条件是各质 点上的主动力所作的虚功之和为零:10ni i i W F r δδ==•=∑用广义坐标来表述:310n ii i x W F q q ααδδ=∂==∂∑ 2达朗贝尔原理(动力学下的虚功原理): 1()0ni i i i i W F m r r δδ==-•=∑〈析〉r δ,W δ均是在时刻未转变(0dt =)时所假想的量,而广义坐标a q 能够是角度,长度或其它的独立的坐标变量。
3拉格朗日方程()d T TQ dt q q ααα∂∂-=∂∂ (1,2,3,,)a s =在保守力下,取拉氏数 L T V =-方程为:()0d L L dt q q αα∂∂-=∂∂ 假设拉氏数中L 不显含广义坐标q β,那么:0Lq β∂=∂ 即 循环积分: Lp const q ββ∂==∂ 4微振动非线性系统在小角度近似下,对拉氏方程的应用 5哈密顿函数与正那么方程 (1) 哈密顿函数1(,,)sH p q t L p q ααα==-+∑式中T Lp q q ααα∂∂==∂∂为广义坐标动量 (2) 正那么方程Hq P Hp q H Lt tαααα∂=∂∂=-∂∂∂=-∂∂ (1,2,3,,)a s =假设哈氏函数H 中不显含广义坐标q β,那么:0Hp q ββ∂=-=∂ 即:循环积分 Tp const q ββ∂==∂ 在稳固条件下(H 中不显含t ),12sp q T ααα==∑那么有能量积分:H T V =+6泊松括号1[,]()sG H G HG H q p p q ααααα=∂∂∂∂=-∂∂∂∂∑ 7哈密顿原理与正那么变换 (1)哈密顿原理保守力系下:210t t Ldt δ=⎰概念:21t t S Ldt =⎰为主函数(3) 正那么变换通过某种变数的变换,找到新的函数*H ,使正那么方程的形式不变(相当于坐标变换)。
工程力学习题答案第一章静力学根底知识思考题:1. ×;2. √;3. √;4. √;5. ×;6. ×;7. √;8. √习题一1.根据三力汇交定理,画出下面各图中A 点的约束反力向。
解:〔a 〕杆AB 在A 、B 、C 三处受力作用。
由于力p 和B R 的作用线交于点O 。
如图〔a 〕所示,根据三力平衡汇交定理, 可以判断支座A 点的约束反力必沿 通过A 、O 两点的连线。
〔b 〕同上。
由于力p 和B R 的作用线 交于O 点,根据三力平衡汇交定理, 可判断A 点的约束反力向如 以下图〔b 〕所示。
2.不计杆重,画出以下各图中AB 杆的受力图。
解:〔a 〕取杆AB 为研究对象,杆除受力p 外,在B 处受绳索作用的拉力B T ,在A 和E 两处还受光滑接触面约束。
约束力A N 和E N 的向分别沿其接触外表的公法线,并指向杆。
其中力E N 与杆垂直,力A N 通过半圆槽的圆心O 。
AB 杆受力图见以下图〔a 〕。
(b)由于不计杆重,曲杆BC 只在两端受铰销B 和C 对它作用的约束力B N 和C N ,故曲杆BC 是二力构件或二力体,此两力的作用线必须通过B 、C 两点的连线,且B N =C N 。
研究杆AB ,杆在A 、B 两点受到约束反力A N 和B N ,以及力偶m 的作用而平衡。
根据力偶的性质,A N 和B N 必组成一力偶。
(d)由于不计杆重,杆AB 在A 、C 两处受绳索作用的拉力A T 和C T ,在B 点受到支座反力B N 。
A T 和C T 相交于O 点,根据三力平衡汇交定理,可以判断B N 必沿通过 B 、O 两点的连线。
见图(d ).第二章 力系的简化与平衡思考题:1. √;2. ×;3. ×;4. ×;5. √;6. ×;7. ×;8. ×;9. √.1. 平面力系由三个力和两个力偶组成,它们的大小和作用位置如图示,长度单位为cm ,求此力系向O 点简化的结果,并确定其合力位置。
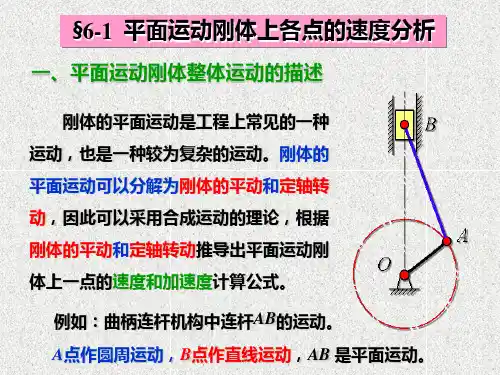
Word-可编辑四、刚体的平面运动应用合成运动的概念,将刚体的平面运动分解为平动和转动,并据此来研究平面运动刚体的角速度、角加速度及其刚体上任一点的速度和加速度。
(一)刚体的平面运动方程1.平面运动的特点在运动过程中,刚体上任一点离某固定平面的距离一直保持不变,称这种运动为刚体的平面运动。
刚体的平面运动可以简化为一平面图形在其自身平面内的运动。
2.运动方程设平面图形S在固定平面Oxy内运动(图4-2—15),显然,图形S的位置彻低由其上任一线段O’M的位置所决定。
这就是说,图形S在任一瞬时的位置可用任一点O’的坐标xo’、yo’及O’M与x轴正向间的夹角φ来表示。
即刚体的平面运动方程可写为通常,将O’点称为基点。
(二)平面运动分解为平动和转动若取Oxy为静系,平面图形上任一点O’为基点,并在O’点上固结一随其作平动的动系O’x’y’(图4—2—15)。
则图形S的相对运动为绕基点O’的转动;图形的绝对运动就是平面运动;而牵连运动为动系随问基点O’的平动。
由此可见,平面图形S的运动可以分解为随基点的平动和绕基点的转动。
为了方便,在下面讲述中,普通将不再图示动系和静系。
千里之行,始于足下应该注重,平面运动随同基点的平动逻辑与基点的挑选有关,而绕基点的转动逻辑与基点的挑选无关。
因此,在论及角速度和角加速度时,无需指明它们是对哪个基点而言的,并可统称为图形的角速度和角加速度。
又因动系作平动,故在动系中看见到图形的角速度与角加速度就是图形相对静系的绝对角速度和绝对角加速度。
(三)平面图形内各点的速度平面图形内各点的速度有三种求解主意,如表4—2—7所示。
通常,瞬心法和投影法应用较多。
表中,关系式M O O M O M v v '')'()( 称为速度投影定理,该定理对任何运动形式的刚体都是适用的。
因为它是一个代数方程,故按照此定理可求出式中一个未知量。
由瞬心法所表述的关系式可知,当以速度瞬心C 为基点时,平面图形上各点的速度分布逻辑与刚体绕定轴转动时一样。
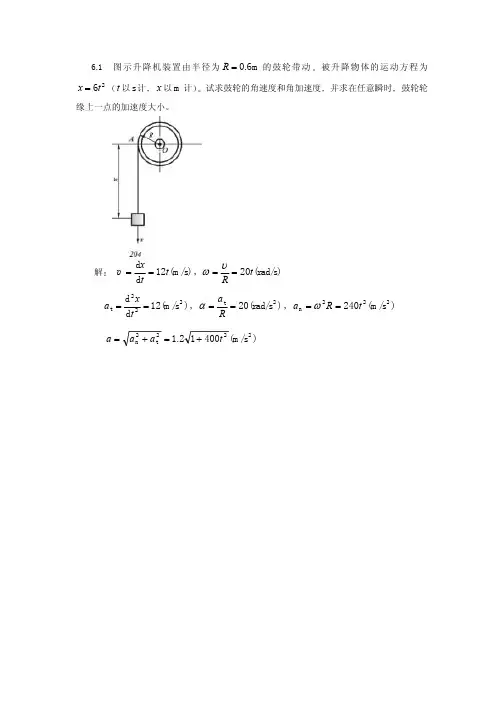
第六章 刚体的基本运动 习题全解[习题6-1] 物体绕定轴转动的运动方程为334t t -=ϕ(ϕ以rad 计,t 以s 计)。
试求物体内与转动轴相距m r 5.0=的一点,在00=t 与s t 11=时的速度和加速度的大小,并问物体在什么时刻改变它的转向? 解:角速度: 2394)34(t t t dt ddt d -=-==ϕω 角加速度:t t dtddt d 18)94(2-=-==ωα速度: )94(2t r r v -==ω)/(2)094(5.0|20s m r v t =⨯-⨯===ω)/(5.2)194(5.0|21s m v t -=⨯-⨯==切向加速度:rt t r a t 18)18(-=-==ρα法向加速度:22222)94()]94([t r rt r v a n -=-==ρ 加速度: 422222222)94(324])94([)18(t t r t r rt n a a n t -+=-+-=+=)/(8165.0)094(0324|24220s m r a t =⨯=⨯-+⨯== )/(405.1581.305.0)194(1324|24221s m r a t =⨯=⨯-+⨯== 物体改变方向时,速度等于零。
即:0)94(2=-=t r v )(667.0)(32s s t ==[习题6-2] 飞轮边缘上一点M,以匀速v=10m/s运动。
后因刹车,该点以)/(1.02s m t a t =作减速运动。
设轮半径R=0.4m,求M点在减速运动过程中的运动方程及t=2s时的速度、切向加速度与法向加速度。
解:t dtd a t 1.04.022-===ϕρα (作减速运动,角加速度为负)t dt d 25.022-=ϕ12125.0C t dtd +-=ϕ2130417.0C t C t ++-=ϕ12124.005.0)125.0(4.0C t C t dtd R v +-=+-⨯==ϕ104.0005.0|120=+⨯-==C v t图题46-251=C0000417.0|2130=+⨯+⨯-==C C t ϕ 02=C ,故运动方程为: t t 250417.03+=ϕt t t t R s 100167.0)250417.0(4.033+-=+-==ϕ速度方程:1005.02+-=t v)/(8.910205.0|22s m v t =+⨯-== 切向加速度:)/(2.021.01.0|22s m t a t t -=⨯-=-== 法向加速度:222)25125.0(4.0+-⨯==t a n ρω)/(1.240)252125.0(4.0|2222s m a t n =+⨯-⨯==[习题6-3] 当起动陀螺罗盘时,其转子的角加速度从零开始与时间成正比地增大。
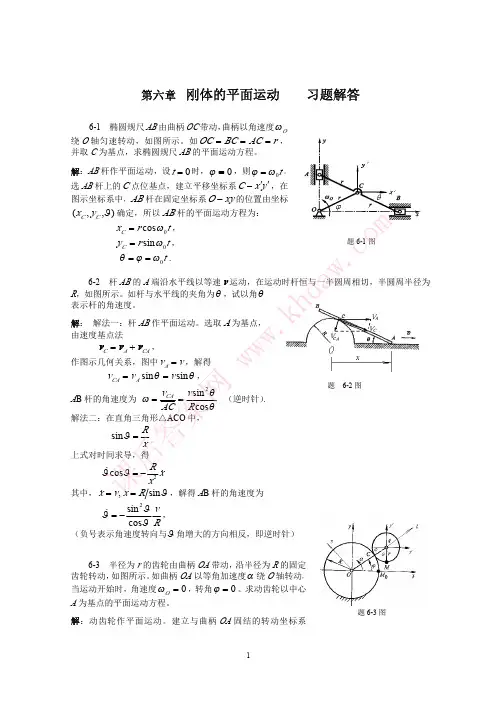
6-1在图示四连杆机构中,已知:匀角速度O ω,OA =B O 1=r 。
试求在°=45ϕ且AB ⊥B O 1的图示瞬时,连杆AB 的角速度AB ω及B 点的速度。
解:连杆AB 作平面运动,由基点法得BA A B v v v +=由速度合成的矢量关系,知φcos v A BA =v杆AB 的角速度)(/AB /O BA AB 2122+==ωωv (逆时针)B 点的速度2245/r cos v O A B ω=°=v (方向沿AB )6-2. 在图示四连杆机构中,已知:3.021===L B O OA m ,匀角速度2=ωrad/s 。
在图示瞬时,11==L OB m ,且杆OA 铅直、B O 1水平。
试求该瞬时杆B O 1的角速度和角加速度。
解:一.求1ω60230..OA v A =×=⋅=ω m/s取A 为基点,则有BA A B v v v += 得 23.0/6.0ctg v v A B ===ϕ m/sm09.2)3.01()3.0/6.0(sin /v v 2/122A BA =+×==ϕ杆B O 1的角速度67630211../BO /v B ===ω rad/s 顺时针 二.求1ε取点A 为基点,则有n BA A a a a a a ++=+ττBA nB B将上式向X 轴投影21222857s /m .B O /ctg v )sin AB /v (OA ctg a )sin /a (a a a sin a cos a sin a BBA n B n BA A B nBA A n B B +=⋅+⋅+⋅−=++−=−=+−ϕϕωϕϕϕϕϕττ杆B O 1的角加速度7.1923.0/8.57/11===B O a B τεrad/s 2逆时针6-3.图示机构中,已知:OA =0.1m , DE =0.1m ,m 31.0=EF ,D 距OB 线为h=0.1m ;rad 4=OA ω。
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕcos )(r R x A += (1) ϕsin )(r R y A +=(2)α为常数,当t = 0时,0ω=0ϕ= 0 221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R = ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角θ 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:RvR v A A ==ωhv AC v AP v ABθθω2000cos cos ===习题6-1图ABCv 0hθ习题6-2图PωABv CABCv ohθ习题6-2解图习题6-3解图习题6-3图v A = vv B = v ωAωBR vR v B B 22==ω B A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度ω=12 rad/s ,θ=30︒,ϕ=60︒,BC =270mm 。
试求该瞬时杆BC 的角速度和点C 的速度。
解:杆BC 的瞬心在点P ,滚子O 的瞬心在点D BDv B ⋅=ωBPBD BP v B BC ⋅==ωω ︒︒⨯=30sin 27030cos 36012 rad/s 8=PC v BC C ⋅=ωm/s 87.130cos 27.08=︒⨯=6-5 在下列机构中,那些构件做平面运动,画出它们图示位置的速度瞬心。
解:图(a )中平面运动的瞬心在点O ,杆BC 的瞬心在点C 。
图(b )中平面运动的杆BC 的瞬心在点P ,杆AD 做瞬时平移。
习题6-5图习题6-4图习题6-4解图习题6-5解图(a)习题6-6图习题6-6解图l ϕυl2BO 1ωABAυB υO1O ABωω(a)o90DCv Bv CAv ABωOE6-6 图示的四连杆机械OABO 1中,OA = O 1B =21AB ,曲柄OA 的角速度ω= 3rad/s 。
试求当示。
ϕ= 90°而曲柄O 1B 重合于OO 1的延长线上时,杆AB 和曲柄O 1B 的角速度。
解:杆AB 的瞬心在O3===ωωOAv AAB rad/s ωl v B 3= 2.531===ωωlvB B O rad/s6-7 绕电话线的卷轴在水平地面上作纯滚动,线上的点A 有向右的速度v A = 0.8m/s ,试求卷轴中心O 的速度与卷轴的角速度,并问此时卷轴是向左,还是向右方滚动?解:如图333.16.08.03.09.0==-=A O v ωrad/s2.1689.09.0=⨯==O O v ωm/s卷轴向右滚动。
6-8 图示两齿条以速度1v 和2v 作同方向运动,在两齿条间夹一齿轮,其半径为r ,求齿轮的角速度及其中心O 的速度。
解:如图,以O 为基点: r v v O O ω+=1r v v O O ω-=2解得:221v v v O +=r v v O 221-=ω6-9 曲柄-滑块机构中,如曲柄角速度ω= 20rad/s ,试求当曲柄OA 在两铅垂位置和两水平位置时配汽机构中气阀推杆DE 的速度。
已知OA = 400mm ,AC = CB = 20037mm 。
习题6-7图A1vOB2v A1vOB2vv OωO习题6-8图 习题6-8解图习题6-9图(b)DED v v =ACBCv ωAv DOE解:OA 定轴转动;AB 、CD 平面运动,DE 平移。
1.当ϕ= 90°,270°时,OA 处于铅垂位置,图(a )表示ϕ= 90°情形,此时AB 瞬时平移,v C 水平,而v D 只能沿铅垂, D 为CD 之瞬心 v DE = 0同理,ϕ= 270°时,v DE = 02.ϕ= 180°,0°时,杆AB 的瞬心在B ϕ= 0°时,图(b ),A C v v 21=(↑) 此时CD 杆瞬时平移421====A C D DE v v v v m/s (↑) 同理ϕ= 180°时,v DE = 4m/s (↓)6-10 杆AB 长为l = 1.5 m ,一端铰接在半径为r = 0.5 m 的轮缘上,另一端放在水平面上,如图所示。
轮沿地面作纯滚动,已知轮心O 速度的大小为v O = 20 m/s 。
试求图示瞬时(OA 水平)B 点的速度以及轮和杆的角速度。
解:轮O 的速度瞬心为点C ,杆AB 的速度瞬心为点P 405.020===r v O O ωrad/s 2202==r v O A ωm/sθωcos 5.145sin 220︒==AP v A AB210==14.1 rad/s)45cos(cos θθ+︒=A B v v9.12)tan 45sin 45(cos 220=︒-︒=θB v m/s6-11 图示滑轮组中,绳索以速度v C = 0.12m/s 下降,各轮半径已知,如图示。
假设绳在轮上不打滑,试求轮B 的角速度与重物D 的速度。
解:轮B 瞬心在F 点 v E = v C 112.012.0102603==⨯⨯=-EB v ωrad/s 06.02121====C E B D v v v v m/sAO Av O BAO Av O BCv A v B P习题6-10图习题6-10解图ωOωABθ 习题6-9解图Fr υ 60ωD EGυOAeυAυe ωC DυFυFEυG习题6-11图6-12 链杆式摆动传动机构如图所示,DCEA 为一摇杆,且CA ⊥DE 。
曲柄OA = 200mm ,CO = CE = 250mm ,曲柄转速n = 70r/min ,CO = 2003mm 。
试求当ϕ= 90°时(这时OA 与CA 成60°角)F 、G 两点的速度的大小和方向。
解:动点:OA 上A ;动系:DCEA ;绝对运动:圆周;相对运动:直线;牵连运动:定轴转动。
3π4.130π2.0=⨯=⋅=n OA v A ωm/s π37.021e ==A v v m/s 12π74.03π7.0e e =⨯==CA v ωrad/s 48π7254.0===e D E v v ωm/s397.02348π730cos =⋅=︒=E G v v m/s (→) 397.0==G F v v m/s (←)6-13 平面机构如图所示。
已知:OA = AB = 20 cm ,半径r = 5 cm 的圆轮可沿铅垂面作纯滚动。
在图示位置时,OA 水平,其角速度 = 2 rad/s 、角加速度为零,杆AB 处于铅垂。
试求该瞬时:(1)圆轮的角速度和角加速度; (2)杆AB 的角加速度。
解:(1) 圆轮的角速度和角加速度cm /s 40=⋅=ωOA v A杆AB 瞬时平移,AB = 0cm /s 40==A B v vrad/s 8==r vB B ω0n==BA B a a0==raB B α习题6-12图习题6-12解图A OB ω习题6-13解图AOBωv Av Ba Aa At BA a (a)(b)(2)杆AB 的角加速度。
0t=-BA A a a ,22t cm /s 80=⋅==ωOA a a A BA2trad/s 4==ABa BA ABα6-14 图示机构由直角形曲杆ABC ,等腰直角三角形板CEF ,直杆DE 等三个刚体和二个链杆铰接而成,DE 杆绕D 轴匀速转动,角速度为0ω,求图示瞬时(AB 水平,DE 铅垂)点A 的速度和三角板CEF 的角加速度。
解:(1)求点A 的速度0ωωa DE v E =⋅=三角板CEF 的速度瞬心在点F0ωa v v E C ==曲杆ABC 的速度瞬心在点O02ωa OA OCv v CA =⋅=(2)求三角板CEF 的角加速度n t n t FE FE E F F a a a a a ++=+将上式沿水平方向投影0t n ==FE F a a (因为v F = 0)0t==FEa FE CEF α6-15曲柄连杆机构在其连杆中点C 以铰链与CD 相连接,DE 杆可以绕E 点转动。
如曲柄的角速度rad/s 8=ω,且cm 25=OA ,cm 100=DE ,若当B 、E 两点在同一铅垂线上时,O 、A 、B 三点在同一水平线上, 90=∠CDE ,求杆DE 的角速度和杆AB 的角加速度。
习题6—14解图v Av Cv Ea Ea E nFE a t F an F a tFEa O(a)(b)(b) 解:(1)求杆DE 的角速度cm /s 200=⋅=ωOA v A杆AB 的速度瞬心在点B cm/s 1002==AC v v 对杆CD 应用速度投影定理cm /s 5030sin =︒=C D v vrad/s 5.0==DEv DDE ω (2)求杆AB 的角加速度ntBA BA A B a a a a ++= 将上式沿铅垂方向投影t0BA a=, 0t ==ABa AB ABα6-16 试求在图示机构中,当曲柄OA 和摇杆O 1B 在铅垂位置时,B 点的速度和加速度(切向和法向)。
曲柄OA 以等角加速度0α= 5rad/s 2转动,并在此瞬时其角速度为0ω= 10rad/s ,OA = r = 200mm ,O 1B = 1000mm ,AB = l = 1200mm 。
解:1.v :0ωr v A = v B //v A ∴ 0=AB ω2102.00=⨯==ωr v B m/s (1) 2.a :ttntnBA A A B B a a a a a ++=+上式沿AB 方向投影得:θθθθcos sin cos sin t n t nAABBa a a a +=+即169.0169.0tan tan 12020n t n t ⋅-+⋅=-+=BO v r r a a a a BBA AB αωθθ 70.352.0169.0)12102.0(22=⨯+⨯-⨯=m/s 2 (169.04.12.02.02.12.0tan 22==-=θ)4122n==Ba m/s 2 B a :⎪⎩⎪⎨⎧==2t 2n m/s7.3m/s4B B B a a a (方向如图)6-17 图示四连杆机构中,长为r 的曲柄OA 以等角速度0ω转动,连杆AB 长l = 4r 。