理论力学 第六章作业答案
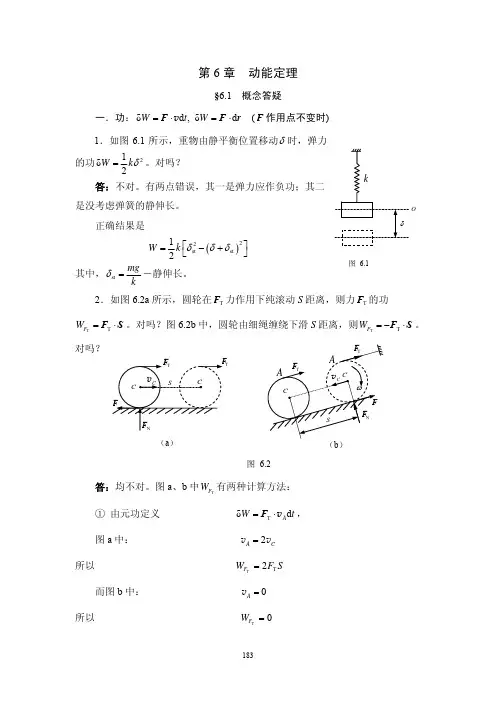
- 格式:ppt
- 大小:441.50 KB
- 文档页数:6
第六章 分析力学滔滔长江东逝水,浪花淘尽英雄。
达朗贝尔,拉格朗日,哈密顿等许多前贤相聚于此“力学论剑”,其“冲击波”使非线性问题也不攻自破。
长江后浪推前浪,你或许在此能够加倍“忘乎因此‘。
微分方程将叱咤风云。
[要点分析与总结]1虚功原理:(平稳时)理想条件下,力学系的平稳条件是各质 点上的主动力所作的虚功之和为零:10ni i i W F r δδ==•=∑用广义坐标来表述:310n ii i x W F q q ααδδ=∂==∂∑ 2达朗贝尔原理(动力学下的虚功原理): 1()0ni i i i i W F m r r δδ==-•=∑〈析〉r δ,W δ均是在时刻未转变(0dt =)时所假想的量,而广义坐标a q 能够是角度,长度或其它的独立的坐标变量。
3拉格朗日方程()d T TQ dt q q ααα∂∂-=∂∂ (1,2,3,,)a s =在保守力下,取拉氏数 L T V =-方程为:()0d L L dt q q αα∂∂-=∂∂ 假设拉氏数中L 不显含广义坐标q β,那么:0Lq β∂=∂ 即 循环积分: Lp const q ββ∂==∂ 4微振动非线性系统在小角度近似下,对拉氏方程的应用 5哈密顿函数与正那么方程 (1) 哈密顿函数1(,,)sH p q t L p q ααα==-+∑式中T Lp q q ααα∂∂==∂∂为广义坐标动量 (2) 正那么方程Hq P Hp q H Lt tαααα∂=∂∂=-∂∂∂=-∂∂ (1,2,3,,)a s =假设哈氏函数H 中不显含广义坐标q β,那么:0Hp q ββ∂=-=∂ 即:循环积分 Tp const q ββ∂==∂ 在稳固条件下(H 中不显含t ),12sp q T ααα==∑那么有能量积分:H T V =+6泊松括号1[,]()sG H G HG H q p p q ααααα=∂∂∂∂=-∂∂∂∂∑ 7哈密顿原理与正那么变换 (1)哈密顿原理保守力系下:210t t Ldt δ=⎰概念:21t t S Ldt =⎰为主函数(3) 正那么变换通过某种变数的变换,找到新的函数*H ,使正那么方程的形式不变(相当于坐标变换)。
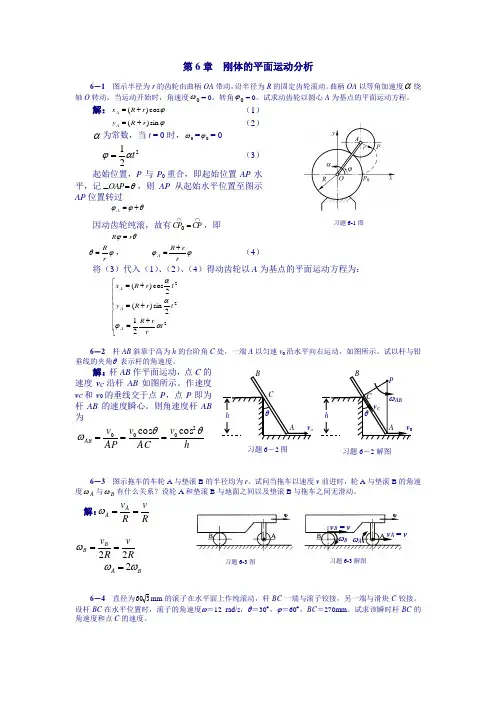
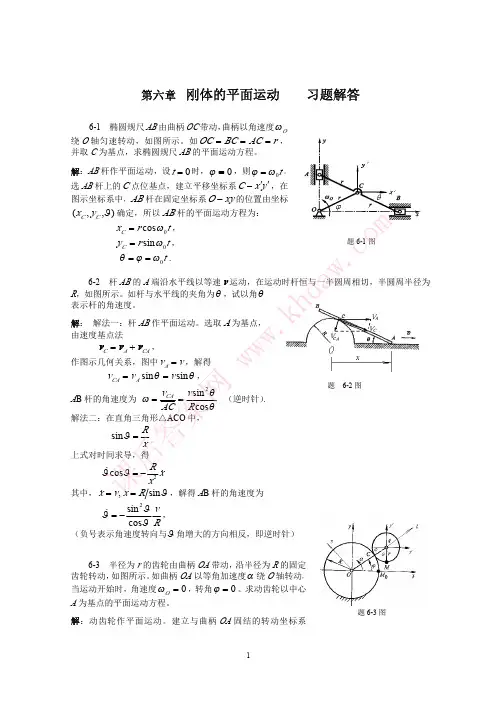
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕcos )(r R x A += (1) ϕsin )(r R y A +=(2)α为常数,当t = 0时,0ω=0ϕ= 0 221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R = ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角θ 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:RvR v A A ==ωR v R v B B 22==ωB A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度ω=12 rad/s ,θ=30︒,ϕ=60︒,BC =270mm 。
试求该瞬时杆BC 的角速度和点C 的速度。
hv AC v AP v ABθθω2000cos cos ===习题6-1图ABCv 0hθ习题6-2图PωABv CABCv ohθ习题6-2解图习题6-3解图习题6-3图v A = vv B = v ωAωB习题6-6图习题6-6解图解:杆BC 的瞬心在点P ,滚子O 的瞬心在点D BDv B ⋅=ωBPBD BP v B BC ⋅==ωω ︒︒⨯=30sin 27030cos 36012 rad/s 8=PC v BC C ⋅=ωm/s 87.130cos 27.08=︒⨯=6-5 在下列机构中,那些构件做平面运动,画出它们图示位置的速度瞬心。
理论力学习题答案(总26页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--2第一章 静力学公理和物体的受力分析一、是非判断题在任何情况下,体内任意两点距离保持不变的物体称为刚体。
( ∨ ) 物体在两个力作用下平衡的必要与充分条件是这两个力大小相等、方向相反,沿同一直线。
( × ) 加减平衡力系公理不但适用于刚体,而且也适用于变形体。
( × ) 力的可传性只适用于刚体,不适用于变形体。
( ∨ ) 两点受力的构件都是二力杆。
( × ) 只要作用于刚体上的三个力汇交于一点,该刚体一定平衡。
( × ) 力的平行四边形法则只适用于刚体。
( × ) 凡矢量都可以应用平行四边形法则合成。
( ∨ ) 只要物体平衡,都能应用加减平衡力系公理。
( × ) 凡是平衡力系,它的作用效果都等于零。
( × ) 合力总是比分力大。
( × ) 只要两个力大小相等,方向相同,则它们对物体的作用效果相同。
( × )若物体相对于地面保持静止或匀速直线运动状态,则物体处于平衡。
( ∨ )当软绳受两个等值反向的压力时,可以平衡。
( × )静力学公理中,二力平衡公理和加减平衡力系公理适用于刚体。
( ∨ )静力学公理中,作用力与反作用力公理和力的平行四边形公理适用于任何物体。
( ∨ )凡是两端用铰链连接的直杆都是二力杆。
( × )如图所示三铰拱,受力F ,F 1作用,其中F 作用于铰C 的销子上,则AC 、BC 构件都不是二力构件。
( × )图3二、填空题力对物体的作用效应一般分为 外 效应和 内 效应。
对非自由体的运动所预加的限制条件称为 约束 ;约束力的方向总是与约束所能阻止的物体的运动趋势的方向 相反 ;约束力由 主动 力引起,且随 主动 力的改变而改变。

《理论力学》第六章作业答案如果不做书中所附的习题,就等于处宝山而空返。
——华罗庚。
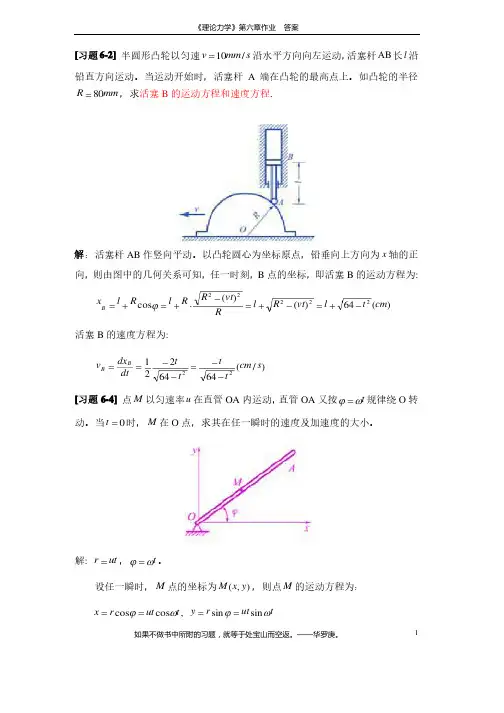
1 [习题6-2]半圆形凸轮以匀速s mm v /10=沿水平方向向左运动,活塞杆AB 长l 沿铅直方向运动。
当运动开始时,活塞杆A 端在凸轮的最高点上。
如凸轮的半径mm R 80=,求,求活塞活塞B 的运动方程和速度方程.解:活塞杆AB 作竖向平动。
以凸轮圆心为坐标原点,铅垂向上方向为x 轴的正向,则由图中的几何关系可知,任一时刻,B 点的坐标,即活塞B 的运动方程为:)(64)()(cos 22222cm t l vt R l Rvt R R l R l x B -+=-+=-⋅+=+=ϕ活塞B 的速度方程为:)/(646422122s cm t t t t dt dx v B B --=--==[习题6-4]点M 以匀速率u 在直管OA 内运动,直管OA 又按t ωϕ=规律绕O 转动。
当0=t 时,M 在O 点,求其在任一瞬时的速度及加速度的大小。
解: ut r =,t ωϕ=。
设任一瞬时,M 点的坐标为),(y x M ,则点M 的运动方程为:t ut r x ωϕcos cos ==, tut r y ωϕsin sin ==速度方程为:速度方程为:t t u t u t ut t u t ut dt ddt dxv x ωωωωωωωsin cos )sin (cos )cos (-=⋅-+===t t t u t t u t u v x ωωωωωωcos sin 2sin )(cos 222222⋅-+=t t u t u t ut t u t ut dt ddt dyv y ωωωωωωωcos sin cos sin )sin (+=⋅⋅+===t t t u t t u t u v y ωωωωωωcos sin 2cos )(sin 222222⋅++=2222)(t u u v v y x ω+=+任一瞬时,速度的大小为:22222)(1)(t u t u u v v v y x ωω+=+=+=加速度方程为:)sin cos (t t u t u dt ddt dv a xx ωωω-==]cos sin [)sin (ωωωωωωω⋅⋅+⋅-⋅-⋅=t t u t u t ut t u t u ωωωωcos sin 22--=t t t u t t u t u a x ωωωωωωωcos sin 4cos )(sin 4322222222⋅++=)cos sin (t t u t u dtd dt dv a yy ωωω+==ωωωωωωω⋅-⋅+⋅+⋅⋅=)sin (cos [cos t t u t u t ut t u t u ωωωωsin cos 22⋅-=t t t u t t u t u a y ωωωωωωωcos sin 4sin )(cos 4322222222⋅-+=222222)(4t u u a a y x ωω+=+任一瞬时,速度的大小为:2222222)(4)(4t u t u u a a a y x ωωωω+=+=+=[习题6-14] 电动绞车由带轮Ⅰ和Ⅱ及鼓轮Ⅲ组成如图电动绞车由带轮Ⅰ和Ⅱ及鼓轮Ⅲ组成如图6-426-426-42所示,鼓轮Ⅲ和带轮所示,鼓轮Ⅲ和带轮Ⅱ刚连在同一轴上。

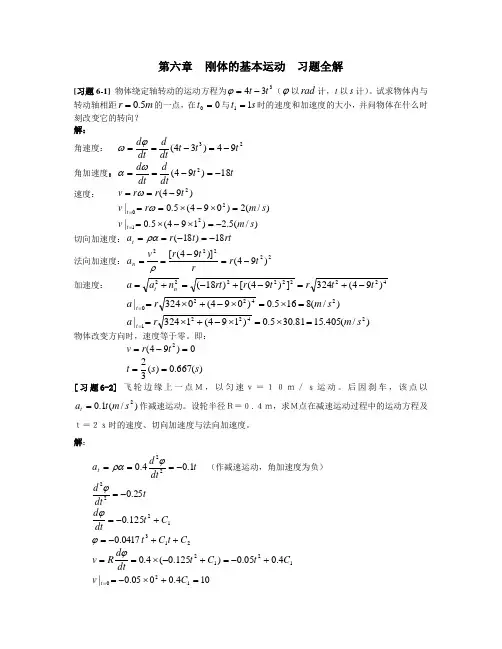
第六章 刚体的基本运动 习题全解[习题6-1] 物体绕定轴转动的运动方程为334t t -=ϕ(ϕ以rad 计,t 以s 计)。
试求物体内与转动轴相距m r 5.0=的一点,在00=t 与s t 11=时的速度和加速度的大小,并问物体在什么时刻改变它的转向? 解:角速度: 2394)34(t t t dt ddt d -=-==ϕω 角加速度:t t dtddt d 18)94(2-=-==ωα速度: )94(2t r r v -==ω)/(2)094(5.0|20s m r v t =⨯-⨯===ω)/(5.2)194(5.0|21s m v t -=⨯-⨯==切向加速度:rt t r a t 18)18(-=-==ρα法向加速度:22222)94()]94([t r rt r v a n -=-==ρ 加速度: 422222222)94(324])94([)18(t t r t r rt n a a n t -+=-+-=+=)/(8165.0)094(0324|24220s m r a t =⨯=⨯-+⨯== )/(405.1581.305.0)194(1324|24221s m r a t =⨯=⨯-+⨯== 物体改变方向时,速度等于零。
即:0)94(2=-=t r v )(667.0)(32s s t ==[习题6-2] 飞轮边缘上一点M,以匀速v=10m/s运动。
后因刹车,该点以)/(1.02s m t a t =作减速运动。
设轮半径R=0.4m,求M点在减速运动过程中的运动方程及t=2s时的速度、切向加速度与法向加速度。
解:t dtd a t 1.04.022-===ϕρα (作减速运动,角加速度为负)t dt d 25.022-=ϕ12125.0C t dtd +-=ϕ2130417.0C t C t ++-=ϕ12124.005.0)125.0(4.0C t C t dtd R v +-=+-⨯==ϕ104.0005.0|120=+⨯-==C v t图题46-251=C0000417.0|2130=+⨯+⨯-==C C t ϕ 02=C ,故运动方程为: t t 250417.03+=ϕt t t t R s 100167.0)250417.0(4.033+-=+-==ϕ速度方程:1005.02+-=t v)/(8.910205.0|22s m v t =+⨯-== 切向加速度:)/(2.021.01.0|22s m t a t t -=⨯-=-== 法向加速度:222)25125.0(4.0+-⨯==t a n ρω)/(1.240)252125.0(4.0|2222s m a t n =+⨯-⨯==[习题6-3] 当起动陀螺罗盘时,其转子的角加速度从零开始与时间成正比地增大。
第一章汽车的动力性1概念1汽车的动力性系指汽车在良好路面上直线行驶时由汽车受到的纵向外力决定的,所能达到的平均行驶速度。
2汽车的上坡能力是用满载时汽车在良好路面上的最大爬坡度。
3自由半径静力半径滚动半径4轮胎的迟滞损失。
5汽车旋转质量换算系数:1).越低档,系数越大。
2).汽车总质量越大,系数越小。
2填空题1汽车动力性的评价指标是最高车速,加速时间和最大爬坡度。
2汽车的加速时间表示汽车的加速能力,常用起步加速时间,超车加速时间来表示加速能力。
3传动系功率损失可分为机械损失和液力损失两大类。
4汽车的驱动力是驱动汽车的外力,即地面对驱动轮的纵向反作用力。
5汽车的动力性能不只受驱动力的制约,它还受到地面附着条件的限制。
3作业题1试说明轮胎滚动阻力的定义、产生机理和作用形式。
【答】定义:汽车在水平道路上等速行驶时受到道路在行驶方向上的分力为轮胎的滚动阻力产生机理:轮胎在加载变形时所所消耗的能量在卸载恢复时不完全回收,一部分能量消耗在轮胎的内部损失上,产生热量,这种损失叫迟滞损失。
这种迟滞损失表现为一种阻力偶。
当轮胎不滚动时,地面对车轮的法向反作用力的分布是前后对称的;当轮胎滚动时,由于弹性迟滞现象,处于压缩过程的前部点地面法相反作用力大于后部点的地面法相反作用力,使它们的合力F a相对于法向前移一个距离a,它随弹性迟滞损失的增大而增大。
即滚动时产生阻力偶矩,阻碍车轮滚动。
作用形式:2解释汽车加速行驶时质量换算系数的意义。
汽车旋转质量换算系数由哪几部分组成?与哪些因素有关?【答】A.汽车的质量分为平移质量和旋转质量两部分;为了便于加速阻力计算,一般把旋转质量的惯性力偶矩转化为平移质量的惯性力,对于固定传动比的汽车,常以系数δ作为计入旋转质量惯性力偶矩后的汽车旋转质量换算系数。
B.该转换系数主要与飞轮的转动惯量、车轮的转动惯量以及传动系的传动比有关。
3汽车轮胎半径增大,其他参数不变时,对汽车的加速性能和爬坡性能有何影响?说明理由。
理论力学6章作业题解6-5 半圆形凸轮以匀速v =10mm/s 沿水平方向向左运动,活塞杆AB 长l ,沿铅直方向运动。
当运动开始时,活塞杆A 端在凸轮的最高点上。
如凸轮的半径R =80mm ,求活塞B 的运动方程和速度方程。
解答 选铅直方向为y 坐标,圆心与轮心O 高程相同,则活塞B 的运动方程为)( 1006400)(222mm l t AB vt R y +-=+-=速度方程为)/( 641022s mm t t dt dy v --== 6-9 点M 以匀速率u 在直管OA 内运动,直管OA 又按t w j =规律绕O 转动。
当t=0时, M 在O 点,求其在任一瞬时的速度及加速度的大小。
解答 采用直角坐标法建立M 点的运动方程。
îíì====)sin(sin )cos(cos t ut ut y t ut ut x w j w j 速度分量及大小为îíì+==-==)cos()sin(/)sin()cos(/t t u t u dt dy v t t u t u dt dx v yx w w w w w w 222)(1t u v v v y x w +=+=加速度分量及大小为ïîïíì-+==---==)sin()cos()cos(/)cos()sin()cos(/22t t u t u t u dt dv a t t u t u t u dt dv a y yx x w w w w w w w w w w w w 222)(4t u a a a y x w w +=+=6-12 一点作平面曲线运动,其速度方程为3=x v 、)4sin(2t v y p p =,其中速度单位为m/s ,时间单位为s 。
已知初瞬时该点在坐标原点,试求该点的运动方程和轨迹方程。
解 求直角坐标表示的运动方程。
第6章 运动学基础一、是非题(正确的在括号内打“√”、错误的打“×”)1.动点速度的大小等于其弧坐标对时间的一阶导数,方向一定沿轨迹的切线。
( √ ) 2. 动点加速度的大小等于其速度大小对时间的一阶导数,方向沿轨迹的切线。
( × ) 3.在实际问题中,只存在加速度为零而速度不为零的情况,不存在加速度不为零而速度为零的情况。
( × ) 4.两个刚体做平动,某瞬时它们具有相同的加速度,则它们的运动轨迹和速度也一定相同。
( × ) 5.定轴转动刚体的角加速度为正值时,刚体一定越转越快。
( × ) 6.两个半径不等的摩擦轮外接触传动,如果不出现打滑现象,两接触点此瞬时的速度相等,切向加速度也相等。
( √ )二、填空题1. 描述点的运动的三种基本方法是矢径法、直角坐标法和自然坐标法。
2. 点做圆周运动,加速度由切向加速度和法向加速度组成,其中切向加速度反映了速度大小随时间的变化率,方向是沿圆周的切线;法向加速度反映了速度的方向随时间的变化率,方向是沿圆周的法线。
3. 质点运动时,如果d d st和22d d s t 同号,则质点做加速运动,反之则做减速运动。
4. 刚体运动的两种基本形式为平动和定轴转动。
5. 刚体平动的运动特征是刚体在运动的过程中其内的任一直线始终和原来的位置平行。
6. 定轴转动刚体上点的速度可以用矢积表示,它的表达式为r ωv ⨯=;刚体上点的加速度可以用矢积表示,它的表达式为v ωr εa ⨯+⨯=。
7. 刚体绕定轴转动时,在任一瞬时各点具有相同的角速度和角加速度,且各点轨迹均为 圆周。
8. 定轴转动刚体内点的速度分布规律为任何一条通过轴心的直径上各点的速度,若将速度矢的端点连成直线,此直线通过轴心。
9. 半径均为R 的圆盘绕垂直于盘面的O 轴做定轴转动,其边缘上一点M 的加速度如图6.23所示,试问两种情况下圆盘的角速度和角加速度的大小分别为:图(a):=ω0;=εRa。
6-1在图示四连杆机构中,已知:匀角速度O ω,OA =B O 1=r 。
试求在°=45ϕ且AB ⊥B O 1的图示瞬时,连杆AB 的角速度AB ω及B 点的速度。
解:连杆AB 作平面运动,由基点法得BA A B v v v +=由速度合成的矢量关系,知φcos v A BA =v杆AB 的角速度)(/AB /O BA AB 2122+==ωωv (逆时针)B 点的速度2245/r cos v O A B ω=°=v (方向沿AB )6-2. 在图示四连杆机构中,已知:3.021===L B O OA m ,匀角速度2=ωrad/s 。
在图示瞬时,11==L OB m ,且杆OA 铅直、B O 1水平。
试求该瞬时杆B O 1的角速度和角加速度。
解:一.求1ω60230..OA v A =×=⋅=ω m/s取A 为基点,则有BA A B v v v += 得 23.0/6.0ctg v v A B ===ϕ m/sm09.2)3.01()3.0/6.0(sin /v v 2/122A BA =+×==ϕ杆B O 1的角速度67630211../BO /v B ===ω rad/s 顺时针 二.求1ε取点A 为基点,则有n BA A a a a a a ++=+ττBA nB B将上式向X 轴投影21222857s /m .B O /ctg v )sin AB /v (OA ctg a )sin /a (a a a sin a cos a sin a BBA n B n BA A B nBA A n B B +=⋅+⋅+⋅−=++−=−=+−ϕϕωϕϕϕϕϕττ杆B O 1的角加速度7.1923.0/8.57/11===B O a B τεrad/s 2逆时针6-3.图示机构中,已知:OA =0.1m , DE =0.1m ,m 31.0=EF ,D 距OB 线为h=0.1m ;rad 4=OA ω。
《理论力学》第六章作业答案:篇一:理论力学第六章习题6-1 用图示三脚架ABCD和绞车E从矿井中吊起重30kN的30的重物,△ABC为等边三角形,三脚架的三只脚及绳索DE均与水平面成60o角,不记架重;求当重物被匀速吊起时各叫所受的力。
解:铰链D为研究对象,坐标系如图示,受力分析为一空间汇交力系,O为D在水平面上的投影。
平衡方程为:?X?0 FBD?cos60?cos120?FAD?cos120?cos60?FED?cos60?FCD?cos60?0?Y??0 FBD?FADZ?0 ?FBD?cos30?FAD?cos30?G?0?FED?cos30?FCD?cos30?FBD?FAD??31.55kN FCD?1.55kN6-2 重物M放在光滑的斜面上,用沿斜面的绳AM与BM拉住。
已知物重W=1000N,斜面的倾角α=60o,绳与铅垂面的夹角分别为β=30o和γ=60o。
如物体尺寸忽略不记,求重物对于斜面的压力和两绳的拉力。
解:重物M为研究对象,坐标系如图示,受力分析为一空间汇交力系,平衡方程为:??X?0 TB?G?cos30?cos120?0 TA?G?cos30?cos1500000?0?0?YZ?0 N?G?cos60?0?N?500N TA?750N TB?433N6-3 起重机装在三轮小车ABC上,机身重G=100kN,重力作用线在平面LMNF之内,至机身轴线MN的距离为0.5m;已知AD=DB=1m,CD=1.5m,CM=1m;求当载重P=30kN,起重机的平面LMN平行于AB时,车轮对轨迹的压力。
解:起重机为研究对象,坐标系如图示,受力为一空间平行力系,平衡方程为:?Z?0 NxA?NCB?NC?G?P?0A?m?m?N?0 ?N?0 NA?MC?(NB?NB)?MD?0y?AD?NB?DB?G?0.5m?P?4m?0CA?8.33kN N?78.33kN N?43.34kN6-4 水平轴上装有两个凸轮,凸轮上分别作用已知P力=800N和未知力F;如轴平衡,求力F和轴承反力。
理论力学习题六答案一、 计算题(6分)已知力F 的大小为60(N ),则力F 对x 轴的矩为多少?对z 轴的矩为多少?34123FABx(cm)y(cm)z(cm)o答案:力F 对x 轴的矩为:160N cm ⋅,(3分)对z 轴的矩为:100N cm ⋅。
(3分)二、计算题(8分)自重为P =100kN 的T 字形刚架ABD ,置于铅垂面内,荷载如图所示。
其中M =20kN.m ,F =400 kN ,q =20 kN /m ,l =1 m 。
试求固定端A 的约束反力。
(2分)解: 取T 字形刚架为研究对象,其受力如图所示。
按图示坐标,列平衡方程 ∑M A (F )=0: M A -M -F 1l -F l cos60°+Fsin60°3l =0解得 M A =M +F 1l +F l cos60°-3F l sin60°=-789.2kN ∑F x =0, F Ax + F 1- Fsin60°=0 解得 F Ax =Fsin60°- F 1=316.4kN ∑F y =0, F Ay -P+ Fcos60° =0 F Ay =P - Fcos60°=-100kN三、计算题(10分)图示立方体A 的重量为8kN ,边长为100cm ,斜面倾角为15θ=,若静摩擦系数为0.25,试问当P 力逐渐增加时,立方体将滑动还是翻动。
(sin 0.2588,cos 0.9659)θθ== 解:1、滑动所需最小力PxyWF N1max 0:sin1500:cos150of o X P F W Y N W =--==-=∑∑f max1sin15 4.002oF f NP F W kN ==+=2、翻倒时所需最小力211()0sin cos 022A M F P a W a W a θθ=-⋅+⋅+⋅=∑ 2121(sin cos ) 4.892P W kNP P θθ=+=<∴先滑动。