理论力学n第六章 点的运动学
- 格式:doc
- 大小:111.50 KB
- 文档页数:2
论力学--运动学运动学研究点和刚体运动的几何规律,即运动方程、轨迹、速度、加速度或角速度、角加速度等运动特征量。
第六章 点的运动学点的运动学是研究一般物体运动的基础,又具体独立的应用意义。
描述点的运动有矢径法、直角坐标法、自然法三种方法。
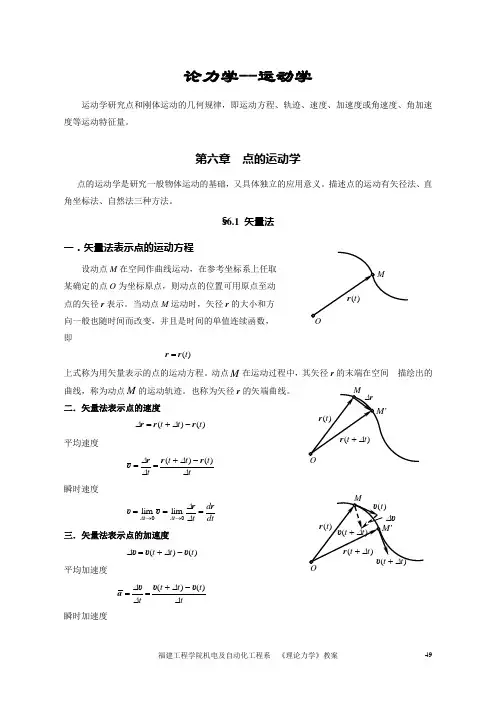
§6.1 矢量法一.矢量法表示点的运动方程设动点M 在空间作曲线运动,在参考坐标系上任取 某确定的点O 为坐标原点,则动点的位置可用原点至动 点的矢径r 表示。
当动点M 运动时,矢径r 的大小和方 向一般也随时间而改变,并且是时间的单值连续函数, 即)(t r r =上式称为用矢量表示的点的运动方程。
动点M 在运动过程中,其矢径r 的末端在空间 描绘出的曲线,称为动点M 的运动轨迹。
也称为矢径r 的矢端曲线。
二.矢量法表示点的速度)()(t t t r r r -+=∆∆平均速度tt t t t ∆∆∆∆)()(r r r υ-+== 瞬时速度dtd t t t rr υυ===→→∆∆∆∆00limlim 三.矢量法表示点的加速度 )()(t t t υυυ-+=∆∆ 平均加速度tt t t t ∆∆∆∆)()(υυυa -+==瞬时加速度2200lim lim dt d dt d t t t rυυa a ====→→∆∆∆∆结论:动点的速度等于它的矢径r 对时间的一阶导数,其加速度等于动点的速度对时间的一阶导数,也等于动点的矢径r 对时间的二阶导数。
§6.2 直角坐标法一.直角坐标表示动点的运动方程由于k j i r z y x ++=,当动点在轨迹上运动时,r 随时间而变化,则动点M 的坐标值x ,y 和z 随时间 而变化。
即⎪⎩⎪⎨⎧===)()()(321t f z t f y t f x消去方程中的参数t ,则得到动点运动的轨迹。
二.直角坐标表示动点的运动速度由于动点M 的矢径可表示为 k j i r z y x ++=,所以动点M 的速度可表示为 k j i r υdtdzdt dy dt dx dt d ++==将动点M 的速度写成投影形式,即k j i υz y x υυυ++=比较以上两式,可得dt dx x =υ,dt dy y =υ,dtdz z =υ 三.直角坐标表示动点运动的加速度动点M 的速度可表示为k j i r υdtdz dt dy dt dx dt d ++==,其加速度可表示为 k j i υa 222222dtzd dt y d dt x d dt d ++==将动点M 的加速度写成投影形式,即k j i a z y x a a a ++=比较以上两式,可得 22dt x d a x =,22dt y d a y =,22dt z d a z =结论:动点的速度在各坐标轴上的投影等于各对应的坐标对时间的一阶导数,动点的加速度在各坐标轴上的投影等于各对应的坐标对时间的二阶导数。
运动学部分:一、点的运动学重点难点分析1.重点:点的运动的基本概念(速度与加速度,切向加速度和法向加速度的物理意义等);选择坐标系,建立运动方程,求速度、加速度。
求点的运动轨迹。
2.难点:运动方程的建立。
解题指导:1.第一类问题(求导):建立运动方程然后求导。
若已知点的运动轨迹,且方程易于写出时,一般用自然法,否则用直角坐标法。
根据点的运动性质选取相应的坐标系,对于自然法要确定坐标原点和正向。
不管用哪种方法,注意将点置于一般位置,而不能置于特殊位置。
根据运动条件和几何关系把点的坐标表示为与时间有关的几何参数的函数,即可得点的运动方程。
2.第二类问题(积分):由加速度和初始条件求运动方程,即积分并确定积分常数。
二、刚体的简单运动重点难点分析:1.重点:刚体平移、定轴转动基本概念;刚体运动方程,刚体上任一点的速度和加速度。
2.难点:曲线平移。
解题指导:首先正确判断刚体运动的性质。
其后的分析与点的运动分析一样分两类问题进行。
建立刚体运动方程时,应将刚体置于一般位置。
三、点的合成运动(重要)重点难点分析:1.重点:动点和动系的选择;三种运动的分析。
速度合成与加速度合成定理的运用。
2.难点:动点和动系的选择。
解题指导:1.动点的选择、动系的确定和三种运动的分析常常是同时进行的,不可能按顺序完全分开。
2.常见的运动学问题中动点和动系的选择大致可分以下五类:(1)两个(或多个)不坟大小的物体独立运动,(如飞机、海上的船舶等)对该类问题,可根据情况任选一个物体为动点,而将动系建立在另一个物体上。
由于不考虑物体的大小,因此动系(刚体)与物体(点)只在一个点上连接,可视为铰接,建立的是平移动坐标系。
(2)一个小物体(点)相对一个大物体(刚体)运动,此时选小物体为动点,动系建立在大物体上。
(3)两个物体通过接触而产生运动关系。
其中一个物体的接触只发生在一个点上,而另一个物体的接触只发生在一条线上。
选动点为前一物体的接触点,动系则建立在后一物体上。
![理论力学第六章 点的合成运动 [同济大学]](https://uimg.taocdn.com/63fd0a4dbe1e650e53ea9909.webp)

·1·第6章 点的合成运动6.1 主要内容6.1.1 点的绝对运动、相对运动和牵连运动1.定系和动系若存在两个有相对运动的坐标系,则可指定其中一个为定系,另一个即为动系。
但工程上一般以固定在地面上的坐标系为定系,相对于定系运动着的坐标系称为动系。
2.动点和牵连点动点为研究的对象,牵连点是动点在动系上的重合点,随动点的相对运动而变,是动系上的点,不同瞬时,有不同的牵连点。
3.三种运动的关系动点相对于定系的运动定义为绝对运动;动点相对于动系的运动定义为相对运动;动系相对于定系的运动定义为牵连运动。
本章的主要任务就是建立这三者之间的定量关系,从而用来解决工程实际某些运动分析问题。
6.1.2 点的速度合成定理动点的绝对速度等于它的牵连速度与相对速度的矢量和。
这就是点的速度合成定理。
a e r =+v v v6.1.3 牵连运动为平移时,点的加速度合成定理当牵连运动为平移时,动点的绝对加速度等于牵连加速度与相对加速度的矢量和。
a e r =+a a a6.1.4 牵连运动为转动时,点的加速度合成定理当牵连运动为转动时,动点的绝对加速度等于牵连加速度、相对加速度与科氏加速度的矢量和,这就是牵连运动为转动时点的加速度合成定理。
a e r C =++a a a a其中r C v a ⨯=ω2。
当取平动动系时0=e ω;0=C a 。
6.2 基本要求1.掌握运动合成与分解的基本概念和方法,准确理解本章阐述的若干概念。
2.明确动点与动系的选择原则,能在具体问题中恰当地选择动点与动系,并正确地分析三种运动。
3.熟练掌握点的速度合成定理和牵连运动为平动时的加速度合成定理及其应用。
4.掌握科氏加速度的概念和计算,准确应用牵连运动为转动时的加速度合成定理及其应用。
6.3 重点讨论应用点的合成运动理论解决实际问题时,其关键是正确地选择动点和动系。
选择原则因具体情况不同而略有区别。
常见的问题有三种题型。
1.两个独立运动的物体,研究两者的相对运动。
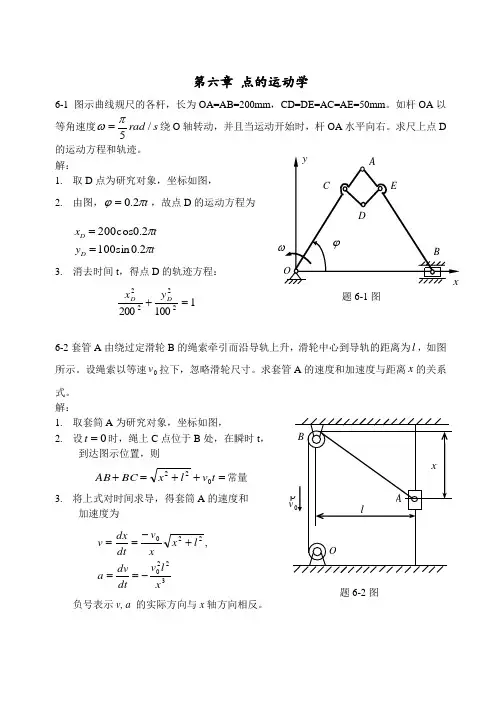
第六章 点的运动学6-1 图示曲线规尺的各杆,长为OA=AB=200mm ,CD=DE=AC=AE=50mm 。
如杆OA 以等角速度s rad /5πω=绕O 轴转动,并且当运动开始时,杆OA 水平向右。
求尺上点D的运动方程和轨迹。
解:1. 取D 点为研究对象,坐标如图,2. 由图,t πϕ2.0=,故点D 的运动方程为ty t x D D ππ2.0sin 1002.0cos 200==3. 消去时间t ,得点D 的轨迹方程:11002002222=+DD yx6-2套管A由绕过定滑轮B 的绳索牵引而沿导轨上升,滑轮中心到导轨的距离为l ,如图所示。
设绳索以等速0v 拉下,忽略滑轮尺寸。
求套管A 的速度和加速度与距离x 的关系式。
解:1. 取套筒A 为研究对象,坐标如图,2. 设0=t 时,绳上C 点位于B 处,在瞬时t ,到达图示位置,则=++=+t v l x BC AB 022常量3. 将上式对时间求导,得套筒A 的速度和加速度为3220220,xl v dt dva l x xv dt dx v -==+-==负号表示v, a 的实际方向与x 轴方向相反。
题6-1图题6-2图6-3 如图所示,OA 和O 1B 两杆分别绕O ,O 1轴转动,用十字形滑块D 将两杆连接。
在运动过程中,两杆保持相交成直角。
已知:OO 1=a ;kt =ϕ,其中k 为常数。
求滑块D的速度和相对OA 的速度。
解:1. 取套筒D 为研究对象,2. 点D 的轨迹是圆弧,运动方程和速度为ak sakt R s ====&D v,θ3. 点D在x O '轴向的坐标和速度为ktak x kt a x D D sin v ,cos D -='='='&D v 和D v '的方向如图所示。
6-4 小环M 由作平移的丁字形杆ABC 带动,沿着图示曲线轨道运动。
设杆ABC 以速度v =常数向左运动,曲线方程为y 2=2px 。
第二篇运动学·第六章点的运动学·6.1 矢量法2. 6-6.下列说法正确的是。
(A)点的位移就是点走过的路程(B)点的矢端曲线,就是点运动的轨迹(C)如果在运动中点的矢径保持不变,点必作直线运动(D)如果在运动中点的矢径没有增量,点的速度一定为零参考答案:BD3. 6-7.下列说法正确的是。
(A)位移是矢量(B)当点作直线运动时,位移不是矢量(C)当点作曲线运动时,位移也可以是代数量(D)不论运动轨迹如何,位移一定是矢量参考答案:AD4. 6-1.运动学是研究物体运动的几何性质的科学。
().参考答案:√5. 6-2.运动学中通常采用两种参考系:定参考系和动参考系。
().参考答案:√6. 6-3.运动方程反映了物体运动的速度与时间的对应规律。
().参考答案:×7. 6-4.点的加速度等于矢径对时间的一阶导数。
().参考答案:×第二篇运动学·第六章点的运动学·6.2 直角坐标法3. 6-13.下列说法正确的是。
(A)在直角坐标法中,点的坐标和时间的对应关系,就是点的运动方程(B)当点作直线运动时,位移就等于路程(C)点作匀变速直线运动时,点的加速度和速度方向一定相同(D)点作匀速直线运动时,加速度一定为零参考答案:AD4. 6-8.动点的速度在直角坐标轴上的投影等于该点的对应坐标对时间的一阶导数。
().参考答案:√5. 6-9.动点的加速度在直角坐标轴上的投影等于该点速度的对应投影对时间的一阶导数。
().参考答案:√6. 6-10.点作直线运动时,若有加速度存在,则加速度必沿着直线方向。
().参考答案:√第二篇运动学·第六章点的运动学·6.3 自然法2. 6-20.点M 沿螺线自外向内运动,它走过的弧长与时间的一次方成正比,则该点()。
(A)越跑越快(B)越跑越慢(C)加速度越来越大(D)加速度越来越小答题: A. B. C. D.参考答案:C6. 6-24.点作曲线运动,若其法向加速度越来越大,则该点的速度____________。
理论力学6章作业题解6-5 半圆形凸轮以匀速v =10mm/s 沿水平方向向左运动,活塞杆AB 长l ,沿铅直方向运动。
当运动开始时,活塞杆A 端在凸轮的最高点上。
如凸轮的半径R =80mm ,求活塞B 的运动方程和速度方程。
解答 选铅直方向为y 坐标,圆心与轮心O 高程相同,则活塞B 的运动方程为)( 1006400)(222mm l t AB vt R y +-=+-=速度方程为)/( 641022s mm t t dt dy v --== 6-9 点M 以匀速率u 在直管OA 内运动,直管OA 又按t w j =规律绕O 转动。
当t=0时, M 在O 点,求其在任一瞬时的速度及加速度的大小。
解答 采用直角坐标法建立M 点的运动方程。
îíì====)sin(sin )cos(cos t ut ut y t ut ut x w j w j 速度分量及大小为îíì+==-==)cos()sin(/)sin()cos(/t t u t u dt dy v t t u t u dt dx v yx w w w w w w 222)(1t u v v v y x w +=+=加速度分量及大小为ïîïíì-+==---==)sin()cos()cos(/)cos()sin()cos(/22t t u t u t u dt dv a t t u t u t u dt dv a y yx x w w w w w w w w w w w w 222)(4t u a a a y x w w +=+=6-12 一点作平面曲线运动,其速度方程为3=x v 、)4sin(2t v y p p =,其中速度单位为m/s ,时间单位为s 。
已知初瞬时该点在坐标原点,试求该点的运动方程和轨迹方程。
解 求直角坐标表示的运动方程。
第六章 点的运动学
6-1 图示曲线规尺的各杆,长为OA=AB=200mm ,CD=DE=AC=AE=50mm 。
如杆OA 以等角速度s rad /5
π
ω=
绕O 轴转动,并且当运动开始时,杆OA 水平向右。
求尺上点D
的运动方程和轨迹。
解:
1. 取D 点为研究对象,坐标如图,
2. 由图,t πϕ2.0=,故点D 的运动方程为
t
y t x D D ππ2.0sin 1002.0cos 200==
3. 消去时间t ,得点D 的轨迹方程:
1100
2002
222
=+D
D y
x
6-2套管
A 由绕过定滑轮
B 的绳索牵引而沿导轨上升,滑轮中心到导轨的距离为l ,如图所示。
设绳索以等速0v 拉下,忽略滑轮尺寸。
求套管A 的速度和加速度与距离x 的关系式。
解:
1. 取套筒A 为研究对象,坐标如图,
2. 设0=t 时,绳上C 点位于B 处,在瞬时t ,
到达图示位置,则
=++=+t v l x BC AB 02
2常量
3. 将上式对时间求导,得套筒A 的速度和
加速度为
3
2
20220
,x
l v dt dv
a l x x
v dt dx v -==+-==
负号表示v, a 的实际方向与x 轴方向相反。
6-3 如图所示,OA 和O 1B 两杆分别绕O ,O 1轴转动,用十字形滑块D 将两杆连接。
在运动过程中,两杆保持相交成直角。
已知:OO 1=a ;kt =ϕ,其中k 为常数。
求滑块D
题6-1图
题6-2图
的速度和相对OA 的速度。
解:
1. 取套筒D 为研究对象,
2. 点D 的轨迹是圆弧,运动方程和速度为
ak s
akt R s ==== D v
,θ
3. 点D 在
x O '轴向的坐标和速度为
kt
ak x kt a x D D sin v ,cos D -='='='
D v
和D v '的方向如图所示。
6-4 小环M 由作平移的丁字形杆ABC 带动,沿着图示曲线轨道运动。
设杆ABC 以速度
v =常数向左运动,曲线方程为y 2=2px 。
求环M 的速度和加速度的大小(写成杆的位移x 的函数)
解:1.取M 点为研究对象,
2.将px y 22
=对时间求导数,
并注意==v x 常量,0=x
,得:,y
x p y = 则:x
p
v y x v M
212
2
+=+= ,
x p x v y
y x p y a M
2422
-=-==。