PLC气动微震压实造型机自动控制
- 格式:doc
- 大小:1.24 MB
- 文档页数:22
基于PLC技术的电子气动机器人自动化控制方法李灵锋发布时间:2021-11-07T10:41:36.845Z 来源:《中国科技信息》2021年10月下30期作者:李灵锋[导读] 在生产技术不断提高的今天,工业上机器人结合了现代生产和科技应用,在工业生产中减轻了人力劳动强度,代替了人工成为危险加工环节的重要劳动力。
电子气动机器人就是近年来工业自动化生产的新鲜产物,机器人气动控制的动力介质是气体,这种介质主要是利用压缩空气作为机器人在运动中的缓冲物质,在机器人工作的过程中运动平稳且迅速,减少了机器人自身的重量,达到了节能的效果。
河北建材职业技术学院李灵锋河北秦皇岛 066004摘要:在生产技术不断提高的今天,工业上机器人结合了现代生产和科技应用,在工业生产中减轻了人力劳动强度,代替了人工成为危险加工环节的重要劳动力。
电子气动机器人就是近年来工业自动化生产的新鲜产物,机器人气动控制的动力介质是气体,这种介质主要是利用压缩空气作为机器人在运动中的缓冲物质,在机器人工作的过程中运动平稳且迅速,减少了机器人自身的重量,达到了节能的效果。
我国的电子气动机器人控制技术的发展满足了工业机械化设备的更新需要,代替了大量的人工,提高了生产效率。
关键词:plc技术;电子气动机器人;自动化控制引言机器人作为一种具有一定智能技术的设备,被广泛的应用于工业生产之中,进而促进了工业生产水平的不断提高。
在实际的工业生产过程中,为了对机器人进行科学合理的控制,就要采取稳定可靠的控制技术。
PLC控制系统具有结构简单、信号处理快以及可靠性高等优点,通过将其运用于机器人自动化生产线的控制工作中,进而能够确保各项生产活动顺利有序的进行,从而促进生产效率的不断提高,为企业带来良好的经济效益。
1机器人发展机器人早在我国西周时期就有相关记载,有好多涉及机器人的文章记载,有不少科学家和杰出工匠都曾制造出具有人类特点或具有动物特征的机器人,最具色彩的是春秋时期的鲁班,鲁班曾制作过一只木鸟可以在空中飞行,充分说明我国早已有机器人概念的出现。
内容提要气动传动作为一种易于推广普及的实现工业自动化的应用技术,其气源容易获得,环境污染小,工作速度快,动作频率高,工程容易实现,而PLC是一种功能强,编程简单、可靠性高的自动化控制产品,二者在工业生产上都得到了广泛的应用。
正是基于以上考虑,为提高生产效率,提高自动化程度,现设计一台基于PLC的全自动气动钻床,该机床能对工件进行快速定位,夹紧及钻削加工。
本文主要是通过应用机床设计的一般方法对传统机床的机构和控制系统进行设计及改进。
设计的主要内容是普通台式钻床传动系统的改进、送料夹紧系统设计、进给系统的设计、PLC控制系统的设计和钻床的结构设计等方面,其中重点在于进给系统、进给系统气压缸的设计和PLC控制系统的设计。
气压系统的设计主要是解决主轴高速旋转与轴向进给两个自由度的实现;PLC控制系统的设计主要是通过应用PLC控制程序来实现对气压回路的动作控制及钻床加工过程的动作设计。
SummaryAs a popular industrial automation technology, the pneumatic drive is easy to spread with advantage easy access to the gas sourse,low environmental pollution,high working speed, high movement frequency and high engineering feasibility. Because PLC is a automation and control products with high function, simple programming and high reliability .Both of them have been widely used in industrial production. It is based on the above considerations,here I am to disign a fully automatic pneumatic drilling machine that based on PLC which can quickly locate,clamp and drill on the the workpiece in order to improve the production efficiency and the degreeof automation.This paper is mainly to design and improve the institution of traditional machine tools and control systems through general application of machine tool designing. The main content of the design is ordinary desktop drill transmission system improvement, feeding clamping system design, the feed system design, PLC control system design and structural design of drilling machine, etc. Of which mainly lies in the feeding system, feed system of pneumatic cylinder design and PLC control system design. Pneumatic system is designed to solve the freedom realization of spindle high-speed and axial. The PLC controlling system is mainly designed to realize the action control of the pneumatic circuit and the action design of drilling process though the application of the PLC control program.目录摘要 (Ⅰ)ABSTRACT (Ⅱ)1绪论 (1)1.1钻床的概述 (1)1.2现代制造业的发展状况 (1)1.3传统钻床的改进方法 (2)1.4本课题设计的内容及目标 (3)2全自动钻床的总体方案设计 (4)2.1自动钻床加工的工件及设计要求 (4)2.2自动钻床的工艺路线分析与确定 (5)2.3 执行系统的方案设计 (5)2.4 传动系统的方案设计 (6)2.5 送料夹紧系统的方案设计 (7)2.6控制系统的方案设计 (7)2.7钻床总体布局设计 (8)3自动钻床气动系统的设计 (9)3.1采用气动自动化的经济效果 (9)3.2钻床气动系统的动作分析及结构设计 (10)3.3自动钻床进给系统的设计 (12)3.4自动钻床传动系统的设计 (19)3.5自动钻床送料夹紧系统的设计 (21)3.6自动钻床控制元件的选择 (25)3.7气源装置及气动辅助元件的选择 (26)3.8钻床的气动回路设计 (29)4钻床的PLC控制系统设计 (31)4.1PLC概述 (31)4.2PLC在顺序控制中的应用 (31)4.3用PLC控制气动钻床的优点 (31)4.4PLC的控制系统设计内容 (32)4.5PLC的硬件系统设计 (32)4.6PLC的软件系统设计 (35)4.7PLC控制程序的调试 (42)结论 (45)参考文献 (46)致谢 (47)1绪论1.1钻床的概述钻床是指主要用钻头在工件上加工孔的机床。
利用PLC实现振动消除系统的自动控制概要摘要本文旨在介绍利用可编程逻辑控制器(PLC)实现振动消除系统的自动控制方法。
振动是许多机械系统中常见的问题,它会导致设备的损坏、噪音和能量消耗。
为了解决这个问题,我们提出了一种振动消除系统,利用PLC来实现自动控制。
引言振动消除系统的目标是通过控制机械系统的力或振动源,来减小或消除振动。
传统的机械系统通常使用传感器和执行器来测量和控制振动。
然而,这些方法一般需要手动干预和调整,效率低下。
因此,我们提出了利用PLC来进行振动消除的自动控制方法。
方法我们将使用PLC作为控制器,并配备传感器和执行器来实现振动消除系统的自动控制。
PLC可以编程,以响应传感器信号和系统状态,并相应地控制执行器来减小或消除振动。
通过预先设定的控制策略,PLC能够自主地计算和执行相应的控制动作。
系统设计PLC将接收传感器测得的振动数据,并与预设的控制算法进行比较。
根据算法的结果,PLC将通过控制执行器来调整振动源的力或位置,从而实现振动的消除。
系统中的控制算法可以根据具体需求进行定制,以适应不同的振动消除场景。
结果与讨论本文介绍的PLC自动控制方法在振动消除系统中具有明显的优势。
通过PLC的自动化控制,我们能够实时监测振动并迅速作出调整,以确保振动消除系统的稳定性和可靠性。
此外,PLC的灵活性和可编程性还允许系统根据实际情况进行动态调整,以实现更好的振动消除效果。
结论本文介绍了利用PLC实现振动消除系统的自动控制方法。
通过使用PLC作为控制器,并配备传感器和执行器,我们能够实现振动的减小或消除,并提高系统的稳定性和可靠性。
未来的研究可以进一步探索不同的控制算法和优化方法,以进一步提升振动消除系统的性能。
机电一体化系统设计试验:PLC控制气动系统拼装实验一、实验目的PLC是通用的自动化控制设备,由于PLC有抗干扰能力强、可靠性高、控制灵活、调试方便、使用操作简便易学等诸多优点,在工业中得到广泛的应用。
1.操作者试验前先学会PLC的指令编程和梯形图绘制。
2.学习PLC的基本操作和控制,能对PLC编程并通过计算机和PLC通讯3.通过对液压系统的控制,了解PLC的输入和输出的控制方式。
二、实验准备1.更换电缆插头将实验柜的电缆连接插头连接到标有“PLC”字样的插座上。
2 将PLC通讯电缆一端接计算机串行口(COM1),另一端接PLC 通讯口。
***该操作应在不带电情况下进行,以免损害串行口电路。
三、PLC编程(操作者应在试验前学会PLC的指令和梯形图,可参阅电子版PLC编程手册)1. 开计算机和PLC。
2. 运行PLC编程工具软件:该软件有图形编程和指令编程两种方式,操作者可自选一种。
根据液压系统的控制要求,编写对液压系统的控制指令或绘制控制梯形图。
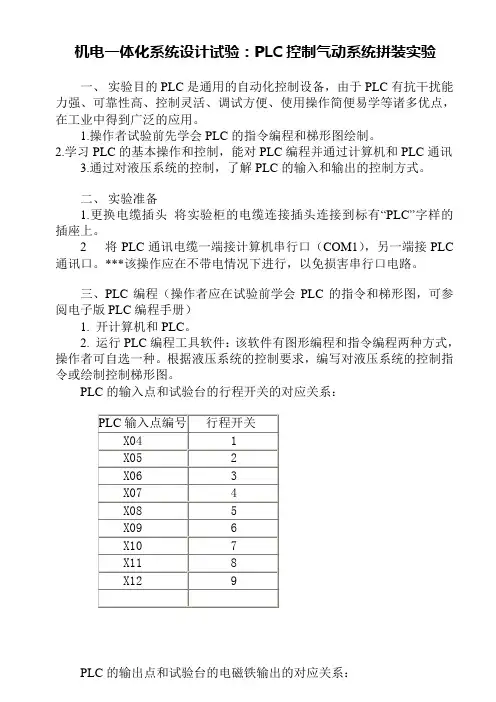
PLC的输入点和试验台的行程开关的对应关系:PLC的输出点和试验台的电磁铁输出的对应关系:1.将PLC通讯电缆一端接计算机串行口(COM1),另一端接PLC通讯口。
***该操作应在不带电情况下进行,以免损害串行口电路。
2.PLC的运行开关操作(参考PLC的操作说明书)。
选择运行开关(在PLC 通讯口旁边)为停止状态,PLC的运行指示灯熄灭。
3.运行PLC编程工具软件:设置通讯端口为:COM1口(与通讯电缆连接的计算机串行口相同)。
4.选择“PLC存储器的读”菜单,可读出PLC中存储的指令。
5.选择“PLC存储器的写”菜单,选择所编写指令的写入范围,可将编写的指令写入PLC存储器。
五、PLC的运行PLC有两种运行方式:计算机通讯控制的模拟运行、单独运行。
1.计算机通讯控制模拟运行:选择PLC编程工具软件中的“运行”菜单,按提示写入正确参数,可实现PLC的模拟运行。
基于PLC的气动机械手控制系统设计一、本文概述随着工业自动化技术的飞速发展,气动机械手作为实现生产自动化、提高生产效率的重要工具,在各个领域得到了广泛应用。
基于可编程逻辑控制器(PLC)的气动机械手控制系统,以其稳定可靠、易于编程和维护的特性,成为当前研究的热点之一。
本文旨在探讨基于PLC 的气动机械手控制系统的设计方法,包括系统构成、硬件选择、软件编程以及调试与优化等方面,以期为我国工业自动化领域的发展提供参考和借鉴。
本文将简要介绍气动机械手及其控制系统的基本原理和特点,为后续的设计工作奠定理论基础。
将详细阐述PLC在气动机械手控制系统中的应用优势,包括其可靠性、灵活性以及扩展性等方面的优势。
在此基础上,本文将深入探讨基于PLC的气动机械手控制系统的设计方法,包括系统架构的设计、硬件设备的选择、软件编程的实现以及系统调试与优化等方面。
本文将总结基于PLC的气动机械手控制系统的设计要点和注意事项,为相关工程实践提供指导和借鉴。
通过本文的研究,旨在为我国工业自动化领域的发展提供新的思路和方法,推动气动机械手控制系统的技术进步和应用推广。
也期望本文的研究成果能对相关领域的学者和工程师产生一定的启示和借鉴作用,共同推动工业自动化技术的发展和创新。
二、气动机械手控制系统概述气动机械手控制系统是以可编程逻辑控制器(PLC)为核心,结合气动执行元件、传感器以及相应的控制逻辑,实现对机械手的精确控制。
该系统结合了气动技术的快速响应和PLC的灵活编程特性,使得机械手的动作更加准确、迅速且易于调整。
PLC控制器:作为整个控制系统的核心,PLC负责接收和处理来自传感器的信号,根据预设的程序逻辑,控制气动执行元件的动作。
PLC 具有高度的可靠性和稳定性,能够适应各种复杂的工作环境。
气动执行元件:包括气缸、气阀和气压调节器等。
气缸是实现机械手抓取、移动等动作的主要执行机构;气阀用于控制气缸的运动方向和速度;气压调节器则用于调节气缸的工作压力,以保证机械手的稳定性和精确性。
《基于PLC的气动机械手控制系统设计》篇一一、引言随着工业自动化程度的不断提高,气动机械手作为一种重要的自动化设备,其控制系统的设计变得尤为重要。
本文旨在设计一个基于PLC的气动机械手控制系统,以提高机械手的控制精度、稳定性和可靠性。
该系统能够实现对气动机械手的精确控制,满足各种复杂工业环境的需求。
二、系统概述基于PLC的气动机械手控制系统主要由PLC控制器、气动执行机构、传感器、人机界面等部分组成。
其中,PLC控制器作为核心部件,负责接收传感器信号、处理控制指令、输出控制信号等任务。
气动执行机构包括气缸、气动阀等,负责实现机械手的运动。
传感器用于检测机械手的位置、速度、压力等参数,为PLC控制器提供反馈信号。
人机界面用于实现人与系统的交互,方便用户对系统进行监控和操作。
三、硬件设计1. PLC控制器选型:选用具有高可靠性、高稳定性、高处理速度的PLC控制器,以满足系统的控制需求。
2. 气动执行机构设计:根据机械手的运动需求,选择合适的气缸和气动阀,实现机械手的精确运动。
3. 传感器选择:根据机械手的控制要求,选择位置传感器、速度传感器、压力传感器等,为PLC控制器提供准确的反馈信号。
4. 人机界面设计:采用触摸屏或计算机作为人机界面,实现用户对系统的监控和操作。
四、软件设计1. 编程语言:采用PLC的编程语言,如梯形图、指令表等,实现系统的控制逻辑。
2. 控制算法:根据机械手的运动需求,设计合适的控制算法,如PID控制、模糊控制等,实现机械手的精确控制。
3. 人机界面程序:编写人机界面的程序,实现用户对系统的监控和操作。
包括系统状态显示、参数设置、运动控制等功能。
五、系统实现1. 硬件连接:将PLC控制器、气动执行机构、传感器、人机界面等部分连接起来,形成完整的控制系统。
2. 程序编写:根据系统的控制要求,编写PLC程序和人机界面程序。
3. 系统调试:对系统进行调试,确保系统的控制精度、稳定性和可靠性。

课程设计(说明书)题目气动微震压实造型机的自动控制班级 141102021学号 22学生姓名李俊琴指导教师刘红2015年 1 月14 日课程设计任务书课程名称材料成型自动化院(系)材料科学与工程学院专业材料成型及控制工程班级学号202 姓名李俊琴课程设计题目气动微震压实造型机的自动控制课程设计时间: 2015 年1 月5 日至2015 年1 月16日课程设计的内容及要求:气动微振压实造型机是一种在压实的过程中能同时震击以得到较高的及较均匀的砂型紧实度的造型设备,造型工作循环主要由接砂、加沙、震击、压实、起模等工序组成。
控制要求:按下启动按钮,自动完成气动微震压实造型机的一个工作循环,之后设备处于下一个循环前的等待状态。
课程设计内容主要包括:①设备工作原理及工艺过程分析;②电磁阀状态表;③PLC点数的确定;④I/O端口分配;⑤功能流程图;⑥PLC程序设计;⑦程序调试等。
指导教师刘红2015 年 1 月 5 日负责教师年月日学生签字年月日摘要本文介绍了电路系统控制下气动微震压实造型机造型过程的自动的PLC控制。
主要动作程序为:接砂、加沙、震击、压实、起模等。
电气控制系统中相应电磁阀通断电决定某一动作的实现。
自动控制系统要求:按下启动按钮,自动完成气动微震压实造型机的一个工作循环,之后设备处于下一个循环前的等待状态。
其次,本文还介绍了气动微震压实造型机的工作原理,基本结构,工艺过程,电气控制系统,PLC的基本结构等,并由PLC在其内部存储执行逻辑运算,顺序运算,计时,计数和算术运算等操作的指令,经过数字式或模拟式的输入和输出,控制整个气动微震压实造型机的一整个造型过程。
关键词:PLC ;气动微震压实造型机 ;造型过程目录第一章绪论21.1 PLC的基本工作原理21.2 气动微震压实造型机31.3 PLC课程设计的目的和意义3第二章设计过程42.1 设备组成及工作原理42.2 工艺过程分析62.3 微震压实造型机控制系统72.4 微震压实造型机电磁阀状态表92.5 I/0端口分配图102.6 输入输出地址分配表112.7功能流程图12第三章程序设计133.1 程序133.2 程序调试17第四章结论18参考文献19第一章绪论1.1 PLC的基本工作原理PLC采用串行循环扫描的工作方式,在PLC中用户程序按先后顺序存放,CPU从第一条指令开始执行程序,直到遇到结束符后又返回第一条,如此周而复始不断循环。
PLC组成的瓷砖冲压机自动控制系统背景随着工业技术的发展,计算机技术已经成为工控领域中不可缺少的一部分。
PLC(可编程逻辑控制)用作自动化控制方案,比传统的电路控制更加便捷和精确。
在冲压机领域,PLC已成为自动控制的主力军。
本文将介绍PLC组成的瓷砖冲压机自动控制系统。
PLC的应用PLC是一种利用数字计算机的思想和方法,以及电力工程、自动控制技术、测控技术等有关学科知识和技术,组成的一种适合于工厂内部自动化现场中进行逻辑控制的操作和计算的专用电子计算机装置。
PLC主要用于数字化控制。
数字化控制是把输入信号数字化,并将其送到逻辑控制器中进行处理。
PLC通过输入模块将数字信号转换为可处理的信号,并将输出模块产生的控制信号驱动外部设备。
PLC主要有三个部分:输入模块、中央处理器和输出模块。
输入模块采集外部信号,中央处理器对采集的信号进行处理,输出模块将处理结果发送给控制对象。
瓷砖冲压机自动控制系统瓷砖冲压机是一种专门用于生产瓷砖的冲压设备。
在瓷砖冲压机中,PLC控制着冲压工艺的整个过程。
冲压机的操作过程如下:1.瓷砖放置在机床模具的上部;2.机器开始工作,压头快速下降,将瓷砖压在模具上;3.压头逐渐升起,完成冲压;4.瓷砖被送到下一工位。
为了实现自动化控制,PLC系统必须对冲压机的每个操作步骤进行控制。
通过输入模块采集各个传感器的信号,PLC可以检测到瓷砖的位置和状态,并根据实际情况进行控制。
例如,当PLC检测到瓷砖已经放置在模具上后,PLC将发送一个信号给电机,使得压头快速下降。
此外,当冲压完成后,PLC还需要发送信号给瓷砖输送系统,使得瓷砖可以被送到下一工位。
总结PLC控制是冲压机自动化控制的核心。
通过输入模块采集各个传感器的信号,PLC可以检测到冲压机的状态,并根据实际情况进行控制。
冲压机自动控制系统的实现,不仅提高了生产效率,还降低了劳动强度和人为错误的发生率,为企业的发展提供了积极影响。
气动微震压实造型线操作工安全操作规程一、工作前准备1. 穿戴劳保用品操作工需佩戴安全帽、防护眼镜、防尘口罩、耐酸碱手套等劳保用品,确保个人安全。
2. 检查设备完好操作工需检查气动微震压实造型线设备的各个部件是否完好,如有损坏或松动应及时修复或紧固。
确保设备正常工作。
3. 掌握操作规程操作工需熟悉并掌握气动微震压实造型线的操作规程,了解设备的工作原理和操作要求。
不得擅自操作,遵守操作规程。
二、安全操作流程1. 启动设备a. 确保就位操作工应站立在安全位置上,避免站在设备前方或后方。
b. 启动设备操作工按照设备操作手册的要求,启动气动微震压实造型线设备。
注意检查设备运行是否正常。
2. 设备运行过程中a. 注意观察操作工需时刻注意观察设备的运行情况,特别是关键部位的运行状态,如有异常应及时采取措施。
b. 维护设备操作工需定期对设备进行维护保养,及时清理设备的积尘、杂物等,保持设备的正常运行。
c. 禁止私自调整设备操作工不得擅自调整气动微震压实造型线设备的参数和工艺流程,如需调整应向负责人请示并获得许可。
3. 停机操作a. 停机前准备操作工需提前准备好停机所需的工具和材料,确保停机操作的顺利进行。
b. 关闭设备一旦发现设备异常或需要停机维护,操作工应按照设备操作手册上的步骤进行设备的停机操作。
确保设备停机安全。
c. 清理设备停机后,操作工应及时清理设备,清除设备上的积尘、杂物等,保持设备的清洁和整洁。
三、安全事故处理1. 事故报告发生安全事故后,操作工应立即向主管或安全员报告,并按照公司的规定填写事故报告。
2. 事故现场保护在处理安全事故时,操作工需采取措施保护事故现场,防止事故的扩大和二次伤害。
3. 事故调查与处理安全员或相关人员将对安全事故进行调查,找出事故的原因,并采取相应的措施进行处理和防范。
四、个人防护与安全意识1. 安全培训公司应定期组织操作工进行安全培训,提高对气动微震压实造型线设备操作的安全意识和技能。
《基于PLC的气动机械手控制系统设计》篇一一、引言随着工业自动化程度的不断提高,气动机械手作为一种重要的自动化设备,其控制系统的设计变得越来越关键。
本文旨在介绍一种基于PLC的气动机械手控制系统设计,以提高机械手的控制精度、稳定性和可靠性。
二、系统概述基于PLC的气动机械手控制系统主要由气动执行机构、传感器、PLC控制器、上位机监控系统等部分组成。
气动执行机构负责完成机械手的各项动作,传感器负责检测机械手的位置、速度等信息,PLC控制器负责接收传感器的信号并控制气动执行机构的动作,上位机监控系统则用于实时监控机械手的运行状态。
三、系统设计1. 气动执行机构设计气动执行机构是机械手的核心部分,包括气缸、气动阀等。
气缸的选型应根据机械手的负载、行程等要求进行,气动阀则负责控制气缸的进气、排气,以实现机械手的各项动作。
2. 传感器设计传感器是机械手控制系统中的重要组成部分,用于检测机械手的位置、速度等信息。
常用的传感器包括光电传感器、接近传感器等。
这些传感器应具有高精度、高稳定性的特点,以保证机械手控制的准确性。
3. PLC控制器设计PLC控制器是整个控制系统的核心,负责接收传感器的信号并控制气动执行机构的动作。
在选择PLC时,应考虑其处理速度、可靠性、扩展性等因素。
此外,还需要根据机械手的控制要求,编写相应的控制程序。
4. 上位机监控系统设计上位机监控系统用于实时监控机械手的运行状态,包括机械手的位置、速度、工作状态等信息。
通过上位机监控系统,可以实现对机械手的远程控制、故障诊断等功能。
四、控制系统实现在控制系统实现过程中,需要完成以下步骤:1. 根据机械手的控制要求,编写相应的PLC控制程序。
2. 将传感器与PLC控制器进行连接,确保传感器能够正常工作并输出信号。
3. 将气动执行机构与PLC控制器进行连接,确保PLC能够控制气动执行机构的动作。
4. 搭建上位机监控系统,实现对机械手的远程控制和实时监控。
基于PLC的自动化振动测试系统设计与实现概述自动化技术的发展使得工业生产过程更加高效、精确,并且减少了人为因素导致的错误。
其中,自动化振动测试系统在机械制造、航空航天、汽车工业等领域中广泛应用。
本文将介绍基于PLC(可编程逻辑控制器)的自动化振动测试系统的设计与实现。
第一部分:系统需求分析在设计自动化振动测试系统之前,我们首先需要进行系统需求分析。
振动测试系统的主要目标是实时、准确地采集和分析物体的振动信号,以检测可能存在的缺陷和故障。
因此,系统需要满足以下需求:1. 实时采集振动信号:系统应能够快速、准确地采集振动信号,并将其传递给后续处理模块。
2. 数据处理与分析:系统需具备一定的信号处理和分析能力,能够实时监测和分析振动信号,并提供相应的报警和故障诊断功能。
3. 可远程监测和控制:系统应支持远程监测和控制,以方便操作人员对系统的管理和维护。
第二部分:系统设计与实现1. 系统硬件结构设计基于PLC的自动化振动测试系统的硬件结构包括传感器、PLC与电机控制器等组成部分。
传感器用于采集振动信号,PLC负责信号采集、处理与控制,电机控制器用于驱动被测物体。
各部分之间通过数据线进行连接。
2. 系统软件设计系统软件设计包括PLC程序设计、信号处理与分析算法设计,以及远程监控与控制应用程序设计等。
(1) PLC程序设计:根据系统需求分析,设计PLC程序实现振动信号的采集、处理与控制。
通过PLC的输入输出模块,将采集到的振动信号传递给信号处理模块,并对其进行实时分析和判断,从而触发相应的控制操作。
同时,PLC程序还需支持远程监测与控制功能。
(2) 信号处理与分析算法设计:根据振动信号的特点,设计相应的信号处理与分析算法。
常用的算法包括傅里叶变换、小波变换等,以提取信号的频率、幅值等特征参数,并进行故障诊断与报警。
(3) 远程监控与控制应用程序设计:通过互联网与PLC进行通信,设计远程监控与控制应用程序。
该程序可实现对系统的远程监测、参数设置、故障诊断等功能。
基于PLC的气动机械手动控制系统设计分析机械手是在机械化、自动化生产过程中发展起来的、并广泛应用于工业生产领域的一种新工具。
在电子信息技术快速发展和广泛应用的现代化社会,机器人的研制与生产在高新技术领域掀起一阵狂澜,同时推动了机械手的发展,使机械手逐渐实现与机械化、自动化的有机结合。
气动技术是实现自动化控制的一项重要技术,它以空气为压力介质,不易形成环境污染,尤其是在非污染行业中的应用广泛,能更加便捷地实现自动化控制。
但传统的机械手操作中通常保留2~3个自由度,在一定范围内限制了机械的灵活度。
而可编程逻辑控制器(PLC) 以其易编程、结构简单、性能强大、可靠性高等优势得到了工业生产自动控制领域的广泛认可。
因此,本文结合机械手控制存在的问题,提出一种基于PLC控制的多角度气动机械手控制系统,从而提高系统运行的可靠性和实用性。
1、气动机械手结构机械手实际上是模拟人手动作而设计的一种机械设备,它根据使用者编入的程序或指令来实现固定轨迹下的自动抓取与搬运等动作,实现工业生产的自动化控制。
结合气动机械手及相关电子器件,本文设计的气动机械手结构主要包括传感器、直线导轨、行程开关、气缸、定位开关、步进电机、支架等部件; 控制系统采用标准模块化设计,主要包括气动装置和PLC控制系统。
传感器作为反馈检测元件,对PLC提供信号控制气动装置中的电磁阀,PLC控制系统作为主控器,可实现对整个机械手的控制,zui终使机械手完成上升、下降、旋转等动作。
本文设计的气动机械手工作压力介于0.6MPa~1.0MPa 之间。
机械手借助2个直线运动与1个旋转运动实现物品的搬运任务; 转动需在摆动臂、摆动气缸、摆动位置微动开关、轴向止推轴承等部件的相互协作下实现,其工作行程为0°~180°; 升降运动则在升降气缸、垂直导柱与导轨、滑动导柱等部件的共同作用下完成,其工作行程为0~150cm; 手部需在气缸、弹簧的作用下完成夹持工件操作,夹持力的大小可通过弹簧预压缩量进行调节。
实训十六自控成型机控制一、实训目的1.掌握自控成型机控制系统的接线、调试、操作二、实训设备序号名 称 型号与规格数量备注1 实训装置 THPFSL-1/212 实训挂箱 A17 13 导线3号 若干4 通讯编程电缆 SC-09 1三菱5 实训指导书THPFSL-1/216计算机(带编程软件)1自备三、面板图四、控制要求1.总体控制要求:如面板图所示,原料在成型机中经过由Yl 、Y2、Y3电磁阀控制的液压缸的冲压后成型。
2 .原料放入成型机时,各液压缸为初始状态:S1=S3=S5=OFF,S2=S4=S6=ON,Yl=Y2=Y4=0FF,Y3=ON 03 .打开“SD”启动开关,系统开始运行,Y2=0N,液压缸B向下运动,使S4=OFF 04 .当液压缸B 下降到底部终点时,S3=ON,此时,启动Yl 、Y3,液压缸A 向右运≡⅞=lJOY2启动◎SDOSl◎ Y4S2S3成型机S6OCYl动,液压缸C向左运动。
Y1=Y4=ON时,Y3=0FF,使S2=S6=OFF°5.当A、C液压缸退回到初始位置,S2=S6=0N时,B液压缸返回,Y2RFF时,S3=0FFo6.当液压缸返回初始状态,S4=ON时,系统回到初始状态取出成品,放入原料后,按动启动按钮,重新启动,开始下一个工件加工。
五、程序流程图六、端口分配及接线图1.2.PLC-A-ι^-七、操作步骤1 .检查实训设备中器材及调试程序。
2 .按照I/O 端口分配表或接线图完成PLC 与实训模块之间的接线,认真检查,确保正确无误。
3 .打开示例程序或用户自己编写的控制程序,进行编译,有错误时根据提示信息修改,直至无误,用SC-09通讯编程电缆连接计算机串口与PLC 通讯口,打开PLC 主机电源开关,下载程序至PLC 中,下载完毕后将PLC 的“RUN/STOP”开关拨至“RUN”状态。
4,先将SI 、S3、S5开关断开、S2、S4、S6开关打开,再打开“SD”启动开关,系统开始运行。
专利名称:全自动造型机全气动压实系统专利类型:实用新型专利
发明人:张建诗
申请号:CN202021293003.6
申请日:20200703
公开号:CN212857657U
公开日:
20210402
专利内容由知识产权出版社提供
摘要:本实用新型提供了一种全自动造型机全气动压实系统,涉及全自动造型机技术领域。
解决了现有技术中全自动造型机能耗高,速度慢的技术问题。
它包括切换机构、压实机构、气动机构、增压机构和液压油管,液压油管包括第一管路和第二管路,第一管路的两端分别与压实机构和增压机构连通,第二管路的两端与第一管路和气动机构连通,切换机构设置在第二管路上,气动机构中存放有液压油,通过使用以压缩空气为动力的压实系统,设备只需稳定的压缩空气即可稳定运行,无需电机驱动,能耗大大降低,并且由于压缩空气直接驱动不用经过泵站所以速度更快。
申请人:临沂市卓杰机械有限公司
地址:276000 山东省临沂市罗庄区罗庄街道南环路山东国际科技模具产业园D1栋
国籍:CN
代理机构:北京细软智谷知识产权代理有限责任公司
代理人:韩国强
更多信息请下载全文后查看。
气动微震压实造型线操作工安全操作规程范文一、前言气动微震压实造型线是一种常见的生产设备,主要用于对物料进行微震压实造型。
在操作过程中,操作工务必严格遵守安全操作规程,以确保自身安全和生产设备的正常运行。
二、安全操作规程1. 个人防护a. 在操作气动微震压实造型线前,操作工应穿戴合适的防护服装、防护鞋、帽子等个人防护用品。
b. 操作工应佩戴防护手套,并保持双手清洁,以防止灰尘或物料对手部造成伤害。
c. 操作工应经常洗手,尤其是在接触物料后,以防止对身体造成任何伤害。
2. 设备检查a. 操作工在操作前应检查气动微震压实造型线的设备是否正常运行,如有异常应立即报告相关人员并停止操作。
b. 检查设备的电源开关、紧固件、传动部件等是否松动或损坏,若发现问题应在维修或更换设备后方可继续操作。
3. 操作规范a. 操作工在操作前应熟悉设备操作手册,并按照规定的步骤进行操作。
未经授权人员严禁操作设备。
b. 在操作过程中,操作工应保持清醒状态,不能饮酒或服用药物,以免影响正常操作。
c. 操作工在操作过程中应保持专注,切勿分散注意力,避免发生操作失误。
d. 操作工在操作过程中应正确使用气动微震压实造型线的控制按钮和开关,禁止随意调整设备的设置,以免发生安全事故。
e. 操作工在操作过程中应注意周围环境的安全,禁止将身体或衣物靠近设备传动部位,避免被夹伤或拉伤。
f. 操作工应经常对设备进行清洁和维护,保持设备的良好状态,减少故障和事故的发生。
4. 应急处置a. 操作工在发生紧急情况时,应立即停止设备,并报告相关人员。
b. 在设备发生故障或事故时,操作工应根据现场情况采取适当的应急措施,确保安全并避免进一步伤害。
5. 临时停机a. 在操作结束或需要临时停机时,操作工应将气动微震压实造型线的电源开关关闭,确保设备停止运行。
b. 操作工应将设备周围的工作区域清理干净,以防止杂物对设备的损坏或影响下一次操作。
6. 定期维护a. 操作工应按照设备操作手册的要求进行设备的定期维护,包括清洁、润滑等工作,以确保设备的正常运行和工作效率。
课程设计(说明书)题目气动微震压实造型机的自动控制班级 141102021学号 22学生姓名李俊琴指导教师刘红2015年 1 月14 日课程设计任务书课程名称材料成型自动化院(系)材料科学与工程学院专业材料成型及控制工程班级学号202 姓名李俊琴课程设计题目气动微震压实造型机的自动控制课程设计时间: 2015 年1 月5 日至2015 年1 月16日课程设计的内容及要求:气动微振压实造型机是一种在压实的过程中能同时震击以得到较高的及较均匀的砂型紧实度的造型设备,造型工作循环主要由接砂、加沙、震击、压实、起模等工序组成。
控制要求:按下启动按钮,自动完成气动微震压实造型机的一个工作循环,之后设备处于下一个循环前的等待状态。
课程设计内容主要包括:①设备工作原理及工艺过程分析;②电磁阀状态表;③PLC点数的确定;④I/O端口分配;⑤功能流程图;⑥PLC程序设计;⑦程序调试等。
指导教师刘红2015 年 1 月 5 日负责教师年月日学生签字年月日摘要本文介绍了电路系统控制下气动微震压实造型机造型过程的自动的PLC控制。
主要动作程序为:接砂、加沙、震击、压实、起模等。
电气控制系统中相应电磁阀通断电决定某一动作的实现。
自动控制系统要求:按下启动按钮,自动完成气动微震压实造型机的一个工作循环,之后设备处于下一个循环前的等待状态。
其次,本文还介绍了气动微震压实造型机的工作原理,基本结构,工艺过程,电气控制系统,PLC的基本结构等,并由PLC在其内部存储执行逻辑运算,顺序运算,计时,计数和算术运算等操作的指令,经过数字式或模拟式的输入和输出,控制整个气动微震压实造型机的一整个造型过程。
关键词:PLC ;气动微震压实造型机 ;造型过程目录第一章绪论21.1 PLC的基本工作原理21.2 气动微震压实造型机31.3 PLC课程设计的目的和意义3第二章设计过程42.1 设备组成及工作原理42.2 工艺过程分析62.3 微震压实造型机控制系统72.4 微震压实造型机电磁阀状态表92.5 I/0端口分配图102.6 输入输出地址分配表112.7功能流程图12第三章程序设计133.1 程序133.2 程序调试17第四章结论18参考文献19第一章绪论1.1 PLC的基本工作原理PLC采用串行循环扫描的工作方式,在PLC中用户程序按先后顺序存放,CPU从第一条指令开始执行程序,直到遇到结束符后又返回第一条,如此周而复始不断循环。
PLC的扫描过程分为内部处理、通信操作、程序输入处理、程序执行、程序输出几个阶段。
当PLC处于停状态时,只进行内部处理和通信操作服务等内容。
在PLC处于运行状态时,从内部处理、通信操作、程序输入、程序执行、程序输出,一直循环扫描工作[1]。
PLC的工作过程可分为三个阶段:输入处理、程序处理和输出处理。
每次扫描开始,先执行一次自诊断程序,对各输入输出点、存储器和CPU 等进行诊断,诊断的方法通常是测试出各部分的当前状态,并与正常的标准状态进行比较,若两者一致,说明各部分工作正常,若不一致则认为有故障。
此时,PLC立即启动关机程序,保留现行工作状态,并关断所有输出点,然后停机。
诊断结束后,如没发现故障,PLC将继续往下扫描,检查是否有编程器等的通信请求。
如果有则进行相应的处理,比如,接受编程器发来的命令,把要显示的状态数据、出错信息送给编程显示等。
处理完通信后,PLC继续先往下扫描,输入现场信息,顺序执行用户程序,输出控制信号,完成一个扫描周期。
然后又从自诊断开始,进行第二轮扫描[2]。
PLC就这样不断地反复循环,实现对机器的连续控制,直到接收到停机命令,或因停电、出现故障等才停止工作。
PLC由中央处理单元、存储器、输入输出单元、电源、编程器五部分组成。
其结构框图如图1-1所示。
图1-1 可编程控制器1.2 气动微震压实造型机造型工序是铸造生产中的一个重要环节。
近年来,在机械化和自动化造型方面,国内外都有了很大的发展。
气动微震压实造型机是一种在压实的过程中能同时震击以得到较高的及均匀的砂型紧实度的造型设备[3]。
与无箱射压造型机比,具有结构简单,使用维修方便,造价便宜的特点,因此此种机型在许多铸造车间造型线上仍得到应用。
由于造型的全部过程都在造型机上完成,因而在流水线上不需要翻机、合箱机等机构,使其十分便于实现自动化。
1.3 课设的目的及意义了解PLC各种设计方法、步骤及设计原则;学以致用,巩固书本知识,通过课程设计是学生初步具有设计PLC气动微震压实造型机的控制能力以及团结合作的精神:进行一次工程设计的基本工程训练,培养学生查阅书籍、参考资料、上网查询信息的能力,运用计算机进行工程绘图的能力,编制技术文件的能力等,从而提高学生解决实际工程技术问题的能力。
第二章设计过程2.1设备组成及工作原理微动压实式造型机由机身、起模机构、震击压实机构、转臂压头部分及气动管路系统等部件组成。
主要适用于批量生产的小型铸件单面型板单箱造型,可造上箱或下箱[4]。
本机采用微震压实机构,震击力和压实力设计的比较大,所以不需预震即可满足简单型或复杂型的要求。
是机械化铸造不可缺少利器之一。
现已逐步取代传统手动造型。
造型机可在型砂被压实的同时,使型板、砂箱和型砂作高频率,小振幅的震动。
当砂箱内填满疏松的型砂时,砂粒之间在不断的运动之中找到新的平衡位置,从而填满空隙,提高紧实度。
在压实过程中连续附加震动时,除上述作用外,还可以使砂粒与砂箱内壁间的外摩擦阻力减小,进一步增加压实效果。
因此附加震动可以显著地改进压实时紧实度不均的现象。
压实同时进行微震还可以获得比单纯压实更高的平均紧实度,因为微震可以改善型砂在紧实过程中的流动性,所以能以同样的压实比压获得比单纯压实更高的平均紧实度及更均匀的紧实度分布[5]。
微震压实造型机不但可以在压实同时进行微震,且在加砂过程中亦可进行微震,即所谓压实前的预震。
这样可以增加砂箱中的填砂量,提高砂型的原始紧实度与紧实度的均匀性;可以减少预填框的高度,减少压实活塞的行程,尤其对高砂箱或复杂模型的造型有利。
图2-1 ZB148A半自动顶箱震压式造型机1-震压机构,2-压头,3-工作台夹紧器,4-摇臂定位销,5-开关组气动微振压实造型机是一种在压实的过程中能同时震击以得到较高的及较均匀的砂型紧实度的造型设备。
与无箱射压造型机比,具有结构简单,使用维修方便,造价便宜的特点,因此此种机型在许多铸造车间造型线上仍得到应用。
工作原理气动微振压实造型机是一种在压实的过程中能同时震击以得到较高的及较均匀的砂型紧实度的造型设备。
造型机的造型循环主要由接砂、加沙、震击、压实、起模等工序组成。
造型机的动作程序如下:静压时压头和搁置在边辊上的砂箱处于工作台上方。
造型机动作时,接砂缸进气,工作台上升相继抬起砂箱及余砂框至接砂位置。
这时压头与定量斗在位移气缸作用下右移,向砂箱内加砂[6]。
定量斗到位后,震击机构开始震击;震击停止后,定量斗移出,压头移入,这时压实缸进气,接砂缸排气下移,工作台上升进行压实,同时震击机构震击。
震击停,压实缸排气,工作台连同砂箱模板下降,下降过程中砂箱被边辊托住,完成回程起模。
至此完成一个造型循环。
表2-1是造型机的动作循环时序表。
表2-1 造型机动作循环时序表(秒/格)2.2工艺过程分析(1) 静态微震机构处于静止状态,如图2-2 a)所示。
此时,弹簧高度为H。
为防止预振时工作台与压实活塞发生撞击,工作台下沿和压实活塞上沿之间,留有一定的间隙Δ。
一般为10~20mm。
(2) 预振预振是指压实前在加砂过程中进行的震击。
预振时,如图2-2 b)所示,压缩空气从工作台a孔,经b、c孔进入震击缸内,其压力既使震击活塞-工作台等上升,又使震击缸压缩弹簧下降一段距离ΔS。
在震击活塞和震击缸相对移动的过程中,进气孔b自动封闭[7]。
压缩空气在缸内经过一段膨胀过程后,继而排气孔d打开,压缩空气从排气孔d快速排出。
排气后,震击缸内压力突降。
震击缸在弹簧力作用下向上运动,而震击活塞-工作台等则靠自重下落,发生撞击。
完成一次震击循环。
(3) 压震压震就是在压实的同时进行震击,如图2-2 c) d)所示。
压震时,压缩空气从e孔进入压实缸5,于是压实活塞4上升并通过弹簧3托起震铁及工作台等。
当砂箱中型砂与压头接触受压时,压实活塞将克服弹簧的弹力,消除间隙Δ,使压实活塞与工作台相接触,这时弹簧的高度变为H-Δ。
与此同时,压缩空气从a孔经b、c孔通入震击缸。
由于工作台已不能再上升,压缩空气只能将震铁下推,直到露出d孔进行排气。
如图2-2所示。
图中弹簧高度为:H1=H-Δ-S,而S=Sj+Sp+Sg。
Sj-进气行程,Sp-膨胀行程,Sg-惯性行程。
(4) 待震击气缸内压缩空气下降到一定数值后,弹簧又将震铁向上弹回,直到震铁与工作台相撞。
这样,震铁在砂型压实过程中不断向上撞击工作台,达到边压实,边震击的效果。
使砂型进一步紧实。
可见,压实同时微震,主要靠压缩空气和弹簧的相互作用,使震击缸(震铁)上、下运动而实现的。
图2-2为循环一周期示意图。
图2-2 流程示意图2.3微震压实造型机控制系统电气控制系统如图2-3所示。
行程开关位置:1XK—接砂活塞上升终了时被压通,并在回程起模前的造型全过程中始终保持压通状态;2XK—定量斗移到工作位置时被压通;3XK—压头移到工作位置时被压通。
图中:1、12-截门,2-分水滤气器,3、13-按钮阀,6-快速排气阀,4、8、10-二位三通阀,5、7、9、11-二位四通电磁气阀,时间继电器,1CT~4CT-电磁气阀,1XK~3XK-行程开关。
其工作过程为:(1) 接砂活塞上升:按下起动按钮lAN,中间继电器lJ通电吸合,电磁气阀1CT通电,压缩空气经阀4、阀5进入接砂缸,接砂活塞上升,带动工作台、模板框、砂箱一起上升。
图2-3 电气控制系统1AN-起动按钮,2AN-停止按钮,B-变压器,RL-螺旋熔断器,1J~4J-中间继电器,1SJ~2SJ-时(2) 加砂、预震:当接砂活塞上升终了时,压通行程外关1XK,于是中间继电器2J通电吸合,电磁气阀2CT通电,压缩空气从阀11进入压头移动缸右腔,将定量斗向左移入工作位置进行加砂。
当定量斗移入工作位置后,压通2XK,于是3J通电。
3J的常开触头闭合,使4CT通电,压缩空气从气控换向阀10进入震击缸,进行加砂预震。
(3) 加砂预震延时:在压通2XK,使3J通电后,3J的另一对常开触头也同时闭合,接通时间继电器1SJ,经过一定时向后(加砂预震延时)1SJ的延时分断常闭触头分断,于是2J断电,2CT跟着断电,压头缸将压头拉回工作位置,这时加砂停止。
由于2J的另一对常开触头又重新分断,使3J断电,这时4CT断电,因此预震也跟着停止。