第二节 三相异步电动机的电磁转矩和机械特性
- 格式:doc
- 大小:1.17 MB
- 文档页数:5
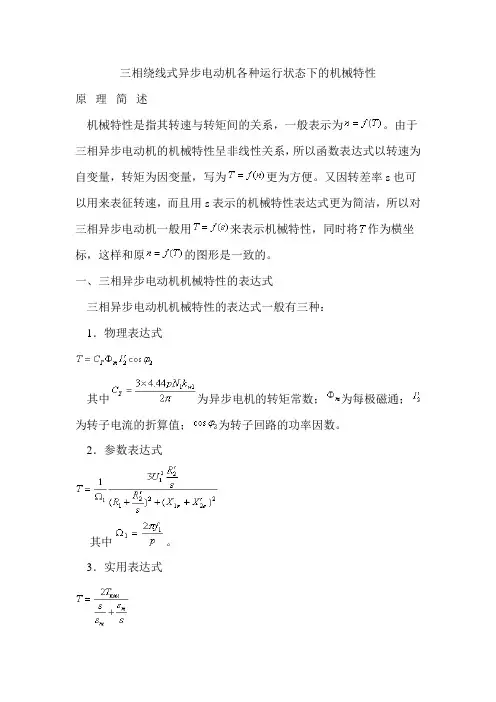
三相绕线式异步电动机各种运行状态下的机械特性原理简述机械特性是指其转速与转矩间的关系,一般表示为。
由于三相异步电动机的机械特性呈非线性关系,所以函数表达式以转速为自变量,转矩为因变量,写为更为方便。
又因转差率s也可以用来表征转速,而且用s表示的机械特性表达式更为简洁,所以对三相异步电动机一般用来表示机械特性,同时将作为横坐标,这样和原的图形是一致的。
一、三相异步电动机机械特性的表达式三相异步电动机机械特性的表达式一般有三种:1.物理表达式其中为异步电机的转矩常数;为每极磁通;为转子电流的折算值;为转子回路的功率因数。
2.参数表达式其中。
3.实用表达式其中为最大转矩,为发生最大转矩时的转差率。
三种表达式其应用场合各有不同,一般物理表达式适用于定性分析与及间的关系,参数表达式可以分析各参数变化对电动机运行性能的影响,而实用表达式最适合用于进行机械特性的工程计算。
二、三相异步电动机的机械特性1.固有机械特性固有机械特性是指异步电动机在额定电压、额定频率下,电动机按规定方法接线,定子及转子回路中不外接电阻(电抗或电容)时所获得的机械特性,如图15-1所示。
图15-1 三相异步电动机的固有机械特性下面对机械特性上反映其特点的几个特殊点进行分析:(1)起动点:其特点是:,,起动电流;(2)额定运行点:其特点是:,,;(3)同步速点:其特点是:,,,,点是电动状态与回馈制动的转折点;(4)最大转矩点:电动状态最大转矩点,其特点是:,;回馈制动最大转矩点,其特点是:,;由公式可以看出,。
2.人为机械特性由三相异步电动机机械特性的参数表达式可见,异步电动机的电磁转矩在某一转速下的数值,是由电源电压、频率、极对数及定转子电路的电阻、电抗、、、决定的。
因此人为的改变这些参数,就可得到不同的人为机械特性。
现介绍改变某些参数时人为机械特性的变化:(1)降低电压不变,不变,因为,,,所以降低电压时,、、均减小,其人为机械特性见图15-2。

三相异步电动机的机械特性(一)机械特性方程1)物理表达式:T=CTФmI2’cosф2 (T是电磁作用的结果)2)参数表达式:3) 工程表达式:——外施电源电压;——电源频率;——电机定子绕组参数;——电机转子绕组参数。
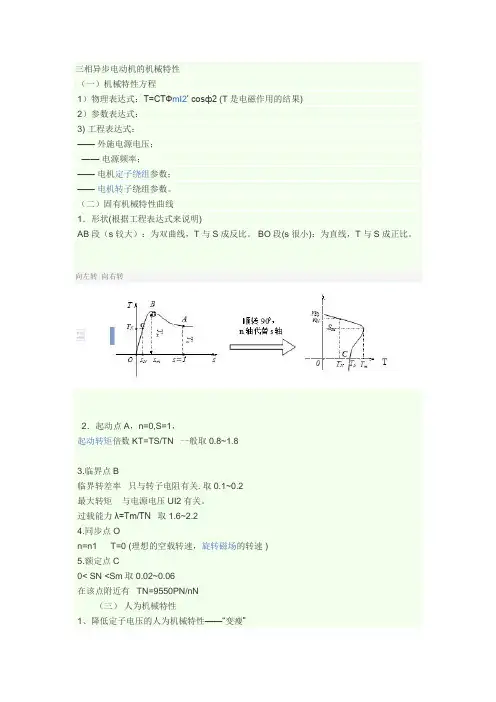
(二)固有机械特性曲线1.形状(根据工程表达式来说明)AB段(s较大):为双曲线,T与S成反比。
BO段(s很小):为直线,T与S成正比。
向左转|向右转2.起动点A,n=0,S=1,起动转矩倍数KT=TS/TN 一般取0.8~1.83.临界点B临界转差率只与转子电阻有关. 取0.1~0.2最大转矩与电源电压UI2有关。
过载能力λ=Tm/TN取1.6~2.24.同步点On=n1 T=0 (理想的空载转速,旋转磁场的转速 )5.额定点C0< SN <Sm取0.02~0.06在该点附近有TN=9550PN/nN(三)人为机械特性1、降低定子电压的人为机械特性——“变瘦”当定子电压U1 降低时,电磁转矩T与U1 的平方成正比,故同步转速不变,Sm不变,最大转矩Tm 和起动转矩TS 随电压平方降低。
其特性曲线(红色)所示。
向左转|向右转2、转子串电阻的人为机械特性——“变软”当转子回路串电阻时,同步点不变,Sm与转子电阻成正比,转速随电阻增加而减小,最大转矩Tm保持不变,在一定范围内起动转矩有所增加,其特性曲线(红色)所示向左转|向右转3、降低定子电压频率的人为机械特性——“变小”降低定子电压频率时,同步转速随之下降,从而使得电机转速下降,但特性的硬度基本保持不变。
电动机在工作时要求主磁通保持不变,因此在降低频率的同时,定子电压也要随之降低。
向左转|向右转滑动轴承和滚动轴承的优缺点的比较时间:2012-07-25来源:阿里巴巴资讯摘要:现在市场上轴承越来越多,最常见的就是滚动轴承和滑动轴承,下面看一下两种轴承的比较.现在市场上轴承越来越多,最常见的就是滚动轴承和滑动轴承,下面看一下两种轴承的比较.滚动轴承是在滚动摩擦下工作的进口轴承。


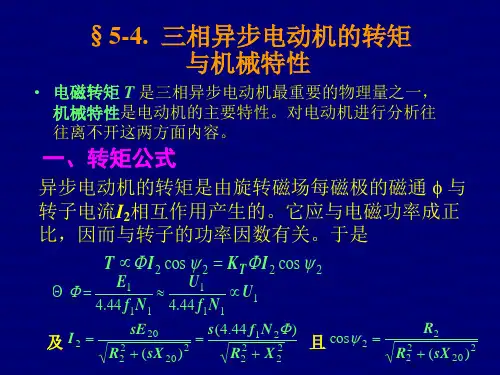
三相异步电动机的转矩与机械特性电磁转矩是三相异步电动机最重要的物理量之一。
而机械特性是它的主要特性之一。
一、三相异步电动机的转矩三相异步电动机的电磁转矩为:将代入上式则有:二、三相异步电动机的机械特性1、*固有机械特性:异步电动机在额定电压和额定电流下,用规定的接线方式,定子电路和转子电路不串接任何电阻或电抗时的机械特性称为固有机械特性(自然机械特性)。
可用四个特征点来描述固有机械特性:1.当T=0点,即抱负空载点(0,n0 )其中:n0=60f1/p2.电机额定工作点(TN,nN)其中:TN=9.55PN/nN3.启动点(Tst,0),此时n=0,s=1,所以有:4.极值点(nm,Tmax)有:电机固有机械特性的两个重要指标:(1) 启动力量系数(2) 过载力量系数转矩-转差率特性表达式:2、人为机械特性:转变定子电压、电子电流频率、定子电路串入电阻或电抗、转子电路串入电阻或电抗时的机械特性称为电动机的人为机械特性。
1)降电源电压时的人为机械特性当U降低,n0及Sm不变。
Tmax正比于U2。
即在同一转差率的状况下,人为特性与固有特性的转矩之比等于电压的平方和之比。
因此,异步电动机对电压的波动特别敏感。
此外,电网电压下降,在负载转矩不变的状况下,将使电动机转速下降,转差率S增加,电流增大,引起电机发热或烧坏。
2)定子电路串入电阻或电抗时的人为机械特性与降低电源电压时的人为特性类似,所不同的是定子电路串电阻或电抗的最大转矩比直接降压时的最大转矩大些。
3)定子电路串入电阻或电抗时的人为机械特性与降低电源电压时的人为特性类似,所不同的是定子电路串电阻或电抗的最大转矩比直接降压时的最大转矩大些。
Tmax正比于1/f2,Sm正比与1/f,n0正比与f,Tst正比与1/f。
注:转变频率时要保证最大转矩不变,应使U/f不变,因此变频时要转变电压。
第二节三相异步电动机的电磁转矩和机械特性三相异步电动机转轴上产生的电磁转矩是决定电动机输出的机械功率大小的一个重要因素,也是电动机的一个重要的性能指标。
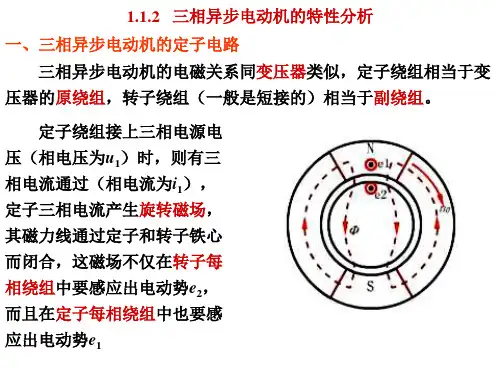
一、三相异步电动机的转矩特性1、电磁转矩的物理表达式三相异步电动机的工作原理告诉我们,电磁转矩是旋转磁场与转子绕组中感应电流相互作用产生的,设旋转磁场每极的磁通量用Φ表示,它等于气隙中磁感应强度平均值与每极面积的乘积。
Φ表示了旋转磁场的强度。
设转子电流用I2表示。
根据电磁力定律,电磁转矩T em应与Φ成正比、与I2也成正比,即T em∝Φ·I2。
此外转子绕组是一个感性电路,转子电流I2滞后于感应电动势E2,它们之间的相位差角是。
考虑到电动机的电磁转矩对外做机械功,与有功功率相对应。
因此电磁转矩T em还与转子电路的功率因数cos有关,即与转子电流的有功分量I2cos(与E2同相位的电流分量)成正比。
总结以上分析,可列出异步电动机的电磁转矩方程式中KT是一个与电动机本身结构有关的系数。
该公式是分析异步电动机转矩特性的重要依据。
2、转矩特性电磁转矩与转差率之间的关系T em=(S)称为电动机的转矩特性。
可以推得式中KT’、转子电阻R2、转子不动时的感抗X20都是常数,且X20远大于R2。
由于上式用电机定、转子绕组中的电阻、电抗等参数反映电磁转矩T em和转差率S之间的关系,所以上式又称之为电磁转矩的参数表达式。
由转矩的表达式(4-5)可知,转差率一定时,电磁转矩与外加电压的平方成正比,即T em∝U12。
因此,电源电压有效值的微小变动,将会引起转矩的很大变化。
当电源电压U1为定值时,电磁转矩T em是转差率S的单值函数。
图4-13画出了异步电动机的转矩特性曲线。
二、三相异步电动机的机械特性当电源电压U1和转子电路参数为定值时,转速n和电磁转矩T的关系n=f(T)称为三相异步电动机的机械特性。
机械特性曲线可直接从转矩特性曲线变换获得。
将图4-15中的转矩特性曲线顺时针转动90°,并将s换成n就可以得到三相异步电动机的机械特性曲线,如图4-16所示。
三相异步电动机的机械特性
1.三相异步电动机的电磁转矩
三相异步电动机的转矩:
三相异步电动机的转矩是由旋转磁场的每极磁通Φ与转子电流I2相互作用而生成的。
它与Φ和I2 的乘积成正比,此外,它还与转子电路的功率因素cosφ2 有关。
转矩表达式:
式中,K——与电动机结构参数、电源频率有关的一个常数;
U1,U ——定子绕组相电压,电源相电压;
R2——转子每相绕组的电阻;
X20——电动机不动(n=0)时转子每相绕组的感抗。
2.三相异步电动机的固有机械特性
固有机械特性:
异步电动机在额定电压和额定频率下,用规定的接线方式,定子和转子电路中的不串联任何电阻或电抗时的机械特性称为固有(自然)机械特性。
电动机的抱负空载转速:
额定转矩及额定转差率:S=(N1-N2)/N1
转矩-转差率特性的有用表达式,即规格化转矩-转差率特性。
3.三相异步电动机的人为机械特性
人为机械特性:
异步电动机的机械特性与电动机的参数有关,也与外加电源电压、电源频率有关,将关系式中的参数人为地加以转变而获得的特性称为异步电动机的人为机械特性。
电压U的变化对抱负空载转速no和临界转差率Sm不发生影响,但最大转矩Tmax与U2成正比,当降低定子电压时,no和Sm不变,而Tmax大大减小。
在同一转差率状况下,人为特性与固有特性的转矩之比等于电压的平方之比。
因此在绘制降低电压的人为特性时,是以固有特性为基础,在不同的S处,取固有特性上对应的转矩乘降低电压与额定电压比值的平方,即可作出人为特性曲线:
在电动机定子电路中外串电阻或电抗后,电动机端电压为电源电压减去定子外串电阻上或电抗上的压降,致使定子绕组相电压降低。
第二节三相异步电动机的电磁转矩和机械特性
三相异步电动机转轴上产生的电磁转矩是决定电动机输出的机械功率大小的一个重要因素,也是电动机的一个重要的性能指标。
一、三相异步电动机的转矩特性
1、电磁转矩的物理表达式
三相异步电动机的工作原理告诉我们,电磁转矩是旋转磁场与转子绕组中感应电流相互作用产生的,设旋转磁场每极的磁通量用Φ表示,它等于气隙中磁感应强度平均值与每极面积的乘积。
Φ表示了旋转磁场的强度。
设转子电流用I2表示。
根据电磁力定律,电磁转矩T em应与Φ成正比、与I2也成正比,即T em∝Φ·I2。
此外转子绕组是一个感性电路,转子电流I2滞后于感应电动势E2,它们之间的相位差角是。
考虑到电动机的电磁转矩对外做机械功,与有功功率相对应。
因此电磁转矩T em还与转子电路的功率因数cos有关,即与转子电流的有功分量I2cos(与E2同相位的电流分量)成正比。
总结以上分析,可列出异步电动机的电磁转矩方程
式中KT是一个与电动机本身结构有关的系数。
该公式是分析异步电动机转矩特性的重要依据。
2、转矩特性
电磁转矩与转差率之间的关系T em=(S)称为电动机的转矩特性。
可以推得
式中KT’、转子电阻R2、转子不动时的感抗X20都是常数,且X20远大于R2。
由于上式用电机定、转子绕组中的电阻、电抗等参数反映电磁转矩T em和转差率S之间的关系,所以上式又称之为电磁转矩的参数表达式。
由转矩的表达式(4-5)可知,转差率一定时,电磁转矩与外加电压的平方成正比,即T em∝U12。
因此,电源电压有效值的微小变动,将会引起转矩的很大变化。
当电源电压U1为定值时,电磁转矩T em是转差率S的单值函数。
图4-13画出了异步电动机的转矩特性曲线。
二、三相异步电动机的机械特性
当电源电压U1和转子电路参数为定值时,转速n和电磁转矩T的关系n=f(T)称为三相异步电动机的机械特性。
机械特性曲线可直接从转矩特性曲线变换获得。
将图4-15中的转矩特性曲线顺时针转动90°,并将s换成n就可以得到三相异步电动机的机械特性曲线,如图4-16所示。
1、四个工作点
在机械特性曲线中要抓住以下几个工作点。
●额定工作点C
三相异步电动机额定状态下运行,转速n=nN,s=sN,轴上的输出转矩即为带动轴上的额定机械负载的额定转矩TN,额定转矩TN为与额定功率PN和额定转速nN关系可用下式表示:
式中PN——电动机轴上输出的额定功率(kW)
nN——电动机额定转速(r/min)
TN——电动机上的输出的额定转矩(N?m)
在忽略电动机本身的机械损耗转矩(如轴承摩擦等)的情况下,可以认为电磁转矩TemN
与轴上的输出的额定转矩相等,经推导有
式中P2——电动机轴上输出的机械功率(kW);
n——电动机转速(r/min)。
2)临界工作点B
从曲线中可以看出,曲线的形状以B点为界,AB段与BC段的变化趋势是完全不同的,B点就是一个临界点,并且B点对应的电磁转矩即为电机的最大转矩Tm,B点对应的转差率sm 为临界转差率。
可以证明,产生最大转矩时的临界转差率Sm为
从上两式可见,
●Tm与电源电压U1的平方成正比。
不同U1时的机械特性曲线如图4-15所示。
由图可见,对于同一负载转矩T2,当电源电压U1下降时,电动机转速也随之下降。
如果电源电压U1继续下降,使负载转矩T2超过电动机的最大转矩Tm时,电动机将停止转动,转速n=0。
这时电动机电流马上升高到额定电流的若干倍,电动机将因过热而烧毁,这种现象称为“闷车”或“堵转”。
●最大转矩Tm与转子电阻R2无关,但临界转差率Sm与转子电阻R2成正比。
改变R2能使Sm随之改变,例如增加R2,n=( T em)曲线便向下移动(如图4-16)。
(3)为了保证电动机在电源电压发生波动时,仍能够可靠运行,一般规定最大转矩Tm 应为额定转矩TN的数倍,用λm表示,称为过载系数,即
(4-12)
过载系数λm表示了电动机允许的短时过载运行能力,是异步电动机的一个重要指标。
λm越大,电动机适应电源电压波动的能力和短时过载的能力就越强。
一般三相异步电动机的过载系数λm为1.8~2.5。
●起动工作点A
电动机起动瞬间,n= 0,s=1,所对应的电磁转矩Tst称为起动转矩。
Tst与电源电压U1的平方以及转子电阻R2成正比。
显然,只有在Tst大于负载转矩T2时,电动机才能起动。
Tst越大,电动机带负载起动的能力就越强,起动时间也越短。
Tst与TN的比值称为起动系数,用Kst表示,即
(4-13)
一般笼形转子异步电动机的Kst约为0.8~2。
由图4-16可见,改变转子电阻R2,可使起动转矩Tst=Tm,这在生产上具有实际的意义。
例如绕线转子异步电动机起动时,通过在转子电路中串入适当电阻,不仅可以减小转子电流,还可以起到增加起动转矩的作用。
●理想空载转速点D
曲线与纵坐标的交点即为理想空载转速点D,此时对应的n=n1为同步转速,s=0,电磁转矩T em=0。
但实际运行时,由于存在风阻、摩擦等损耗,所以实际转速略低于同步转速n1,故称D点为理想空载转速点。
2、稳定工作区与非稳定工作区
如图4-14所示,机械特性曲线可分为两部分:BD部分(0<S<Sm)称为稳定区,AB部分(S>Sm)称为不稳定区。
电动机稳定运转只限于曲线的BD段。
电动机在0<S<Sm区间运行时,只要负载阻转矩小于最大转矩Tm,当负载发生波动时,电磁转矩总能自动调整到与负载阻转矩相平衡,使转子适应负载的增减以稍低或稍高的转速继续稳定运转。
如果电动机在稳定运行中,负载阻转矩增加超过了最大转矩,电动机的运行状态将沿着机械特性曲线的BD部分下降越过B点而进入不稳定区,导致电动机停止运转。
因此,最大转矩又称崩溃转矩。
由机械曲线可推知:
(1)异步电动机稳定运行的条件是S<Sm,即转差率应低于临界转差率。
(2)如果从空载到满载时转速变化很小,就称该电动机具有硬机械特性。
上述表明,三相异步电动机具有硬机械特性。
(3)需要说明的是,上述负载是不随转速而变化的恒转矩负载,如机床刀架平移机构等,它不能在S〉Sm区域稳定运行;但风机类负载,因其转矩与转速的平方成正比,经分
析,可以在S〉Sm区域稳定运行。