828D VT3D上电时序
- 格式:pdf
- 大小:156.02 KB
- 文档页数:4
828D Combi带普通三相异步电机测试根据客户要求,试验828D带普通三相异步电机。
试验条件:西门子普通三相异步电机型号:1LA7060-2AA10;系统硬件:828D Basic Milling、Combi驱动模块;软件版本:V04. 03.HF2。
(一)实验目的对于普通三相异步电机,用Combi分别对其进行开环(无编码器)、接TTL 编码器或接1Vpp编码器反馈的测试,实验证明可以使用Combi对其进行控制。
(二)实验步骤一、开环控制:先将普通三相异步电机(1LA7060-2AA10)动力线接到Combi驱动的上,反馈口X201、X205、X220什么也不接。
注意:普通三相异步电机分角接和星接,本实验中是电机需要380V、星接。
1、系统自动拓扑后,使用Starter进行的调试,点击主轴的Configuration,选择无编码器控制,如下图1;2、自动识别的驱动模块,如下图2;图2图33、对于要配置的三相异步电机,选择Induction motor,如图3所示,下一步填写电机响应参数,对于普通三相异步电机,我们需要以下参数,如图4:电机额定电压、电机额定电流、电机额定功率、功率因数、额定频率、电机额定转速、电机最大转速等。
4、下一步,计算电机、控制器数据;5、再一步,选择是否带抱闸;6、按 NEXT,编码器一个也不选,如图7所示:7、按 NEXT,选择报文类型(默认即可),如图8所示:8、按 NEXT,结束配置。
如图9所示:图9到此,Starter上对驱动的配置结束,在NC侧,我们只需设置好MD30130[0]=1,MD30240[0]、[1]都为0,且编码器数量MD30200=0即可。
这样系统就可以对主轴进行开环控制了。
二、接TTL编码器的情况根据系统要求,TTL编码器的反馈直接接到X220口,注意此口只能接TTL 信号(5V供电),不能接HTL编码器(24V供电,HTL编码器通过SMC30亦不能接到单独的Combi模块上),具体设置步骤如下:1、选择带编码器设置,如图10;图102、按 NEXT,自动配置的驱动,以下几步与开环时设置类似,如下面几张图所示:图11图12图13图14图153、对于编码器的设置如下图16,选择Combi上集成的SMC30接口(即X220)的输入作为第一测量反馈,选择相应的TTL编码器;图164、最后也是选择报文类型,结束配置。

828D开机调试流程做完后请在“□”处打勾一、上电前检查条目详细内容备注1 查线□动力线、反馈线接牢,顺序无误□驱动模块间的直流母线、24V母线□24V电源线□所有设备独立接地2 拨码开关二、上电调试 条目详细内容备注1初始设定□ 设置系统语言为中文Chinese请参见简明调试手册3.4章节□ 输入制造商□令:SUNRISE请参见简明调试手册3.2章节□ 设置系统时间请参见简明调试手册3.3章节□ 进入选项界面,检查激活的选项请参见简明调试手册3.6章节□ 激活PP72/48,设置MD12986[0]=-1 有第二块I/O 板时需设置MD12986[1]=-1;请参见简明调试手册3.5章节 □ 激活MCP ,设置MD12986[6]=-1 使用自制机床操作面板时保持MD12986[6]=112 □ 设置RCS 远程诊断访问权限2检查系统软件版本□ V. + SP + HF3监控PLC I/O 点状态□ 监控IB115的状态,如果为0则代表MCP 不正常。
因为IB115的低5位是西门子MCP 进给倍率开关的地址,格雷码开关是不会出现全0状态的。
□ 输入点:急停开关、硬限位开关、报警信号点… □ 输出点:EP 、OFF1、OFF3使能…□ 手轮接线状态:摇手轮时监控DB2700.DBB12(手轮1脉冲计数),如果数值有变化说明手轮接线无误。
4下载PLC 程序□STOP 模式下载,下载后重启系统5PLC 基本功能调试□ MCP 功能是否正常 □ 急停、硬限位功能是否正常 □ 加EP ,OFF1,OFF3使能是否正常 □ 手轮轴选,增量是否正常6 驱动调试□ 拓扑识别请参见简明调试手册5.2章节□修改拓扑比较等级为中级:控制单元数据p9906=1如不修改会影响批量调试;请参见简明调试手册5.2章节□ 配置供电数据,输入电压380V请参见简明调试手册5.3章节□ 电网识别,设置供电数据p3410=5请参见简明调试手册5.3章节□ 分配轴:设置MD30110为电机动力线所在的驱动编号 设置MD30220为电机反馈线所在的驱动编号 设置MD30130=1,激活电机的给定信号设置MD30240=1或4,激活电机的反馈信号。

828D调试流程一、上电前检查1. 查线:包括反馈、动力、24V电源,地线。
2. 查拨码开关,MCP(7,9,10)和PP72/48(1,4,9,10)。
二、上电调试1. 检查版本2. 初始设定:语言,口令,日期时间,选项,MD12986,RCS连接3. 检查PLC I/O是否正确,包括急停、硬限位…4. 检查手轮接线(DB2700.DBB12)5. 下载PLC6. 检查急停功能是否正常7. 驱动调试:拓扑识别,分配轴,修改拓扑比较等级(p9906),配置供电数据,电网识别(p3410)8. 调整硬限位9. NC数据设定:机械参数,轴速度,方向,设置零点,软限位…(参见附表)10. 刀库调试11. 辅助功能调试12. 基本功能备份(BASIC_FUNCTION.ard),驱动要选ASCII格式13. 考机48小时三、伺服优化1. 轴策略选适中,101,303,2012. 自动优化,导出每个轴的优化结果(.xml)和优化报告(.rtf)3. 各轴参数整定,策略1101,选择所有轴,包括主轴4. 圆度测试四、激光干涉仪测试1. 螺补2. 反向间隙3. 球杆仪测试五、试切1. 标准圆,标准方2. 机床厂自己样件六、备份1. 机床测试协议2. 电柜检查表3. ard全部备份4. NC生效数据全部备份:测量系统误差补偿,机床数据,设定数据,刀具/刀库数据…5. 制造商循环备份,包括换刀子程序L6或者TCHANGE,TCA,CYCPE_MA,MAG_Conf…6. PLC程序备份.ptp7. PLC报警文本.ts和.qm,报警帮助文本8. Easy Extend9. 用户自定义界面10. E-log,txt和xml11. 系统许可证备份.Alm12. 优化测试结果截图13. 圆度测试结果截图14. PLC IO地址15. 机床操作说明:MCP自定义键说明,M代码功能说明,PLC报警文本内容说明,PLC 数据MD14510说明,刀库操作说明16. 照片:机床、电柜、试切17. 试切件程序附表:常用机床数据传动系统参数MD32100 AX_MOTION_DIR 轴运动方向(不是反馈极性)MD31030 LEADSCREW_PITCH 丝杠螺距MD31040 ENC_IS_DIRECT[0]…[1] 直接测量系统MD31050 DRIVE_AX_RA TIO_DENOM[0]...[5] 负载变速箱分母MD31060 DRIVE_AX_RA TIO_NUMERA[0]...[5] 负载变速箱分子轴速度MD32000 MAX_AX_VELO 最大轴速度MD32010 JOG_VELO_RAPID 点动方式快速速度MD32020 JOG_VELO 点动速度MD36200 AX_VELO_LIMIT[0]...[5] 速度监控的门限值主轴相关MD35010 GEAR_STEP_CHANGE_ENABLE 齿轮级改变使能MD35110 GEAR_STEP_MAX_VELO[0]...[5] 主轴各档最高转速MD35120 GEAR_STEP_MIN_VELO[0]...[5] 主轴各档最低转速MD35130 GEAR_STEP_MAX_VELO_LIMIT[0]...[5] 主轴各档最高转速限制MD35140 GEAR_STEP_MIN_VELO_LIMIT[0]...[5] 主轴各档最低转速限制SD43200 SA_SPIND_S 通过VDI 进行主轴起动时的速度返回参考点MD34010 REFP_CAM_DIR_IS_MINUS 负方向返回参考点MD34020 REFP_VELO_SEARCH_CAM 寻找参考点开关的速度MD34040 REFP_VELO_SEARCH_MARKER 寻找零脉冲的速度MD34060 REFP_MAX_MARKER_DIST 寻找零标记的最大距离MD34070 REFP_VELO_POS 返回参考点的定位速度MD34100 REFP_SET_POS 参考点(相对于机床坐标系)的位置MD34110 REFP_CYCLE_NR 返回参考点次序MD34200 ENC_REFP_MODE[0]…[1] 返回参考点模式MD34210 ENC_REFP_STA TE[0]…[1] 绝对值编码器调试状态MD11300 JOG_INC_MODE_LEVELTRIGGRD 返回参考点触发方式软限位MD36100 POS_LIMIT_MINUS 第一软限位负向MD36110 POS_LIMIT_PLUS 第一软限位正向优化MD32200 POSCTRL_GAIN[0]...[5] 位置环增益MD32810 EQUIV_SPEEDCTRL_TIME[0]...[5] 速度控制环等效时间常数MD32640 STIFFNESS_CONTROL_ENABLE 动态刚性控制MD32420 JOG_AND_POS_JERK_ENABLE 手动和定位方式下轴加加速度限制使能MD32430 JOG_AND_POS_MAX_JERK 手动方式下轴加加速度最大值MD32431 MAX_AX_JERK[0]…[4] 自动方式下轴加加速度最大值MD32432 PA TH_TRANS_JERK_LIM[0]…[4] 轨迹控制时程序段过渡处轴加加速度最大值刀库管理MD20270 CUTTING_EDGE_DEFAULT 未编程时刀具刀沿的默认设置MD20310 MC_TOOL_MANAGEMENT_MASK 激活不同类型的刀具管理MD52270 MCS_TM_FUNCTION_MASK 刀库管理功能。

三个参数就能搞定西门子828D840DSL电机振动和蜂鸣!共
享屋
在调试设备的初期或者是更换了机械零件后的老设备,很多工程师发现以往运行良好的电机变得尖叫或振动明显,并且电机温度越来越高,长此以往,电机就会寿命减短,严重的还会损坏。
如果不想重新做电机优化,也可以尝试更改以下三个参数,快速解决多数电机蜂鸣和振动。
一、轴参数 32200
在该机床数据中输入位置控制器增益,即所谓的伺服增益系数。
当该值设定的数值大于电机位置控制的能力时,会出现电机抖动或蜂鸣等现象,所以在设备进行位置控制时如果伴随此类现象,可以适当减小该参数的值。
二、驱动参数 P1460
转速控制器 P 增益适配转速下限。
因为不同电机的型号和不同的电机工作情况不同,此参数的值会有所差别,即便是完全一样的设备,此参数也可能存在不同的值。
在电机进行速度控制时,如果发生电机蜂鸣或振动,可以尝试适当减小该参数值。
三、驱动参数 P1462
转速控制器积分时间参数适配转速下限。
与参数 P1460 类似,即便是同种型号的电机在不同工作环境下的1462 参数也不一定相同。
在电机进行速度控制时,如果发生电机蜂鸣或振动,可以尝试适当增大该参数值。
在尝试更改这三个参数后,绝大多数的电机振动和蜂鸣问题都可以得到解决,当然如果工程师有能力完成自动优化或手动优化是更好地选择。
想要快速解决电机振动问题,可以尝试按本文操作。
This post was last modified on 2022年1月13日下午3:31。

目录一、安全检查 (2)二、出厂设置 (2)三、设定语言、日期 (3)四、开启外部设备 (3)五、自动升级驱动 (4)六、轴分配 (5)七、传输PLC (7)八、传输报警文本和制造商循环 (9)九、系统数据设定 (9)十、绝对值回零设定 (9)十一、伺服自动优化 (9)十二、镭射补偿 (13)一、安全检查●目测设备的下列项目:–机械结构是否正确,电气连接是否安全–电源是否接好,输入电压是否正确稳定–屏蔽层和接地是否接好●接通控制系统,在“Nor mal startup”的模式中启动系统:HMI 上出现初始画面后,表明控制系统已启动。
二、出厂设置启动控制系统操作步骤:1。
控制系统接通后,启动时会出现以下提示:2。
在 3 秒钟内,按下〈SELECT〉键。
3. 然后依次按下:菜单扩展键、HSK2(水平软键SK2)、VSK2(垂直软键SK2)4. “Setup men u" 显示在屏幕上,“Normal startup”被选为缺省设置。
选择功能Normal startup系统正常启动。
Reload saved user data系统从系统CF 卡上载入其中保存的用户数据,软键“数据存储”.Install software update/backup 从用户CF 卡或U 盘上安装系统CF 卡的升级程序。
Create software backup将系统CF 卡的数据备份到用户CF 卡或U 盘上。
NCK default data 系统载入供货时设置的西门子NCK 数据,删除PLC 上的永久数据.Drive default data 删除SINAMICS 用户数据.PLC default data PLC 清零,载入缺省NOP PLC 程序。
HMI default data 删除HMI 上的用户数据.Factory settings 在两种方案之间选择: No [方案1]/ Yes [方案2] 方案1:删除SINAMICS 用户数据. 载入西门子NCK 缺省数据。
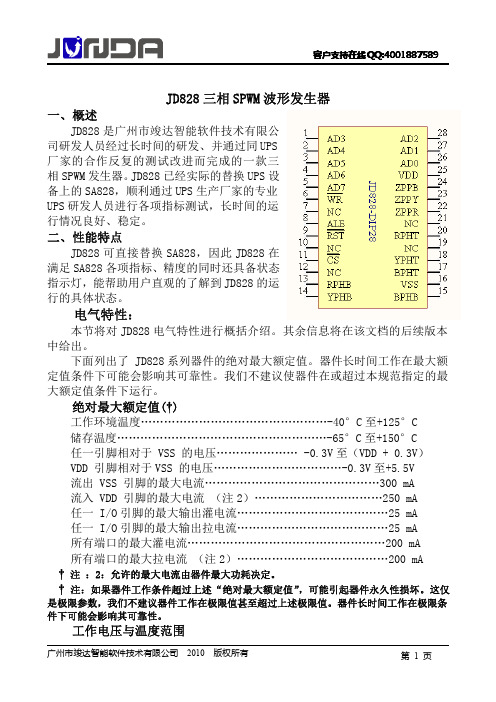
AMD主板上电时序控制芯片IT8282M资料管理提醒: 本帖被阿宇从台式电脑主板电路图纸移动到本区(2010-04-09)IT8282M在主板上多用来控制AMD主板的上电时序,包括PSON,VDDA_EN,VLDT_EN,VCORE_EN, VDIMM_STR_EN等信号Pin(s) No. SymbolAttributeDescription1 VCORE_GDDIVCORE Power GoodActive high. This signal indicates that the power-good signal is fromthe PWM controller for CPU core voltage.2 VLDT_12AI VLDT(1.2V) analog inputs.3 VDDA_25AI VLDT(2.5V) analog inputs.4 VDIMM_STRAI VDIMM DUAL STR(2.5V) analog inputs.5 SB_PSON#DISouth Bridge PSON#SB_PSON#:Active low. This signal is connected to the PSON# signal from the south-bridge or Super I/O to control the on/off of ATXpower supply6 ACPI_S3DIA GPIO pin from S/BActive high. This signal indicates that the system is in ACPI S3 state7 ATX_PWRGDDIATX Power-Good / GNDATX_PWRGD : Active high. input indicates that ATX power supplypower-good is ready8 GND PWR Ground9 ATX_PSON#DIOD8ATX Power PSON#ATX_PSON#: Acitve low. The function of this pin is ATX Power Supply On/Off10 RSTBTN#DIReset Button inputRSTBTN# :Active low. The function of this pin is panel reset button input with de-bounce circuit.11 CPU_PWRGDDOD16CPU Power-GoodActive high. Output indicates that CPU power-good is ready.The external pull high resistor is required12 VDIMM_STR_ENDOD8VDIMM STR EnableActive high. The function of this pin is to enable the PWM for VDIMM_STR dual voltage.The external pull high resistor is required13 VCORE_ENDOD8VCORE EnableActive high. The function of this pin is to enable the PWM for CPUVCORE. The external pull high resistor is required14 VDDA_ENDOD8VDDA EnableActive high. The function of this pin is to enable the PWM for VDDA power for k8 CPU. The external pull high resistor is required15 VLDT_ENDOD8VLDT EnableActive high. The function of this pin is to enable the PWM for VLDT voltage.The external pull high resistor is required16 5VSB PWR +5V Standby Power SupplyIT8282M在主板上多用来控制AMD主板的上电时序,包括PSON,VDDA_EN,VLDT_EN,VCORE_EN,VDIMM_STR_EN等信号。
驱动器调试5.5 SINAMICS 驱动常用参数SINAMICS S120 的参数有CU 控制单元参数、ALM 电源模块参数、SERVO 轴参数; 其中 R 参数为只读参数,P 参数为可读可写参数。
参数说明参数 参数归属 参数值 说明驱动就绪,可以运行 10驱动就绪,但是缺少驱动使能或者驱动有报警 33拓扑结构错误:硬件连接出错或者在更换备件时拓扑结构比较等级P9906未设为3 CU_I 35初次上电,驱动未调试 0驱动就绪,可以运行 32启动准备,等待ON/OFF1信号,对应PCU X20.1 44启动禁止,电源模块EP 使能未接通 ALM 45启动禁止,电源模块有报警 0驱动就绪,可以运行 23启动准备,等待电源模块运行使能P864,对于SLM, 对应PCU X20.1 31启动准备,等待驱动ON/OFF1使能,对应NC/PLC 接口使能信号V380x0002.1和 V380x4001.7 43启动禁止,ON/OFF3使能丢失,对应PCU X20.2 R2 SERVO 45启动禁止,模块有报警 R20SERVO 平滑后的速度设定值 R21SERVO 平滑后的速度实际值 R26ALM/SERVO 平滑后的直流母线电压 R27ALM/SERVO 平滑后的电流实际值 R35SERVO 电机温度 R36ALM/SERVO 模块超温I 2t R37ALM/SERVO 模块温度 R46ALM/SERVO 丢失的使能信号 R61SERVO 电机编码器速度实际值 R67ALM/SERVO 最大的驱动输出电流 R68ALM/SERVO 电流实际值 R722SINAMICS_I R722.0 PCU X20.1端子状态R722.1 PCU X20.2端子状态 P9CU_I 驱动状态,P9≠0表示驱动处于调试状态 P10ALM/SERVO ALM 或SERVO 状态,P10≠0表示模块处于调试状态 P495SERVO 轴BERO 信号输入定义 P971SERVO P971=1自动变0,轴参数存储 P977CU_I P977=1自动变0,所有驱动参数存储 P1460[0]SERVO 伺服速度环增益 P1462[0]SERVO 伺服速度环积分时间 P3985ALM/SERVO 模块控制优先权定义 P9906 CU_I拓扑比较等级设定NC调试6 NC调试重要事项NC的调试必须在制造商口令(“EVENING”)下进行。