Bode图
- 格式:pdf
- 大小:61.08 KB
- 文档页数:1

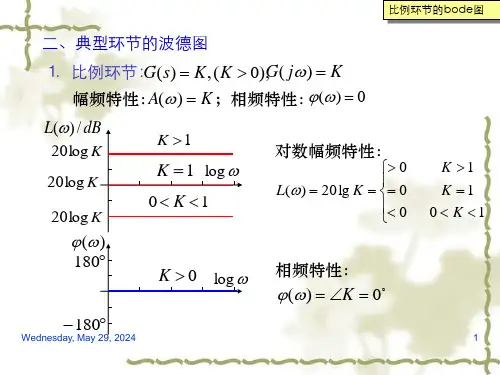
伯德图的原理
伯德图是通过对未知系统输入一系列频率不同的正弦信号,通过测量输出信号的幅值和相位,得到对应不同频率下,该系统对输入信号的幅值相位的作用,从而得到系统的内部结构。
输出相对于输入只是振幅和相位发生了变化,而频率是不变的.而伯德图就是在输入的所有频率上,这里包括我们经常说的低频段、中频段和高频段.对每个频率段取几个点,然后进行运算,算增益,算相位差,再转换成对数,然后就可以在伯德图上面描点,
假如频率为30hz,增益为0.7,相位差为90度,即out的振幅/in的振幅=0.7,out的相位比in的相位滞后了90度.则:
幅频曲线,在伯德图上横坐标的30hz的对应的纵坐标的20lg0.7(DB)处可以描到一个点。
相频曲线,在30hz对应-90度同样可以描到一个点.这样通过繁杂的描点,可以画出系统的伯德。