uCOSii任务设计
- 格式:pdf
- 大小:532.92 KB
- 文档页数:18
uCOS核心算法1.任务调度算法每个任务被赋予不同的优先级等级,从0级到最低优先级OS_LOWEST_PR1O,包括0和OS_LOWEST_PR1O在内(见文件OS_CFG.H)。
当μC/OS-Ⅱ初始化的时候,最低优先级OS_LOWEST_PR1O总是被赋给空闲任务idle task。
注意,最多任务数目OS_MAX_TASKS 和最低优先级数是没有关系的。
用户应用程序可以只有10个任务,而仍然可以有32个优先级的级别(如果用户将最低优先级数设为31的话)。
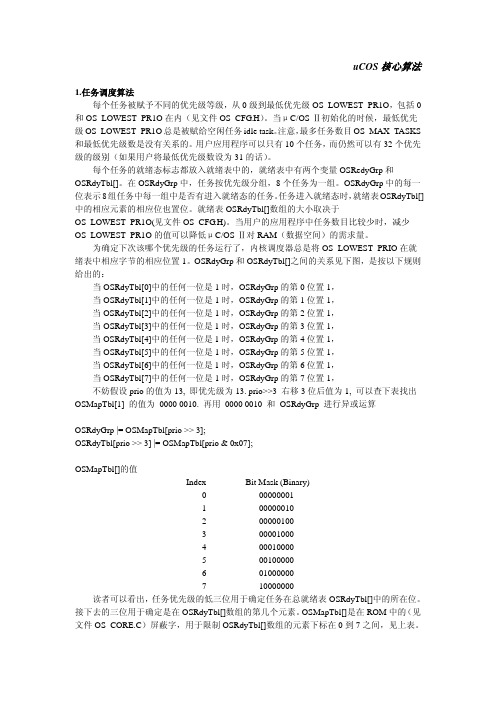
每个任务的就绪态标志都放入就绪表中的,就绪表中有两个变量OSRedyGrp和OSRdyTbl[]。
在OSRdyGrp中,任务按优先级分组,8个任务为一组。
OSRdyGrp中的每一位表示8组任务中每一组中是否有进入就绪态的任务。
任务进入就绪态时,就绪表OSRdyTbl[]中的相应元素的相应位也置位。
就绪表OSRdyTbl[]数组的大小取决于OS_LOWEST_PR1O(见文件OS_CFG.H)。
当用户的应用程序中任务数目比较少时,减少OS_LOWEST_PR1O的值可以降低μC/OS-Ⅱ对RAM(数据空间)的需求量。
为确定下次该哪个优先级的任务运行了,内核调度器总是将OS_LOWEST_PRIO在就绪表中相应字节的相应位置1。
OSRdyGrp和OSRdyTbl[]之间的关系见下图,是按以下规则给出的:当OSRdyTbl[0]中的任何一位是1时,OSRdyGrp的第0位置1,当OSRdyTbl[1]中的任何一位是1时,OSRdyGrp的第1位置1,当OSRdyTbl[2]中的任何一位是1时,OSRdyGrp的第2位置1,当OSRdyTbl[3]中的任何一位是1时,OSRdyGrp的第3位置1,当OSRdyTbl[4]中的任何一位是1时,OSRdyGrp的第4位置1,当OSRdyTbl[5]中的任何一位是1时,OSRdyGrp的第5位置1,当OSRdyTbl[6]中的任何一位是1时,OSRdyGrp的第6位置1,当OSRdyTbl[7]中的任何一位是1时,OSRdyGrp的第7位置1,不妨假设prio的值为13, 即优先级为13. prio>>3 右移3位后值为1, 可以查下表找出OSMapTbl[1] 的值为 0000 0010. 再用 0000 0010 和 OSRdyGrp 进行异或运算OSRdyGrp |= OSMapTbl[prio >> 3];OSRdyTbl[prio >> 3] |= OSMapTbl[prio & 0x07];OSMapTbl[]的值Index Bit Mask (Binary)0 000000011 000000102 000001003 000010004 000100005 001000006 010000007 10000000读者可以看出,任务优先级的低三位用于确定任务在总就绪表OSRdyTbl[]中的所在位。
例2-6 设计一个只有一个任务MyTask的应用程序,当程序运行后,任务MyTask的工作就是每秒在显示器上面显示一个字符“M”。
学习实验代码,分析实现过程,观测实验结果,并写出实验报告。
例2-7 在例2-6应用程序的任务MyTask中再创建一个任务YouTask,当程序运行后,任务MyTask的工作在显示器上面显示一个字符“M”;而任务YouTask则是在显示器上显示字符“Y”。
学习实验代码,分析实现过程,观测实验结果,并写出实验报告。
例2-8 修改例2-7应用程序的任务YouTask。
要求任务YouTask运行20次后,挂起任务MyTask;任务YouTask运行40次后,恢复任务MyTask。
学习实验代码,分析实现过程,观测实验结果,并写出实验报告。
例2-9 改造例2-7的任务MyTask,当任务MyTask运行10次时,用函数OSSchedLock( )对调度器进行加锁;而当任务MyTask运行到第80次时,再用函数OSSchedUnlock( )对调度器进行解锁,并运行该程序。
学习实验代码,分析实现过程,观测实验结果,并写出实验报告。
例2-10 修改例2-7的应用程序,使任务MyTask能删除任务YouTask。
学习实验代码,分析实现过程,观测实验结果,并写出实验报告。
例2-11 建立一个起始任务TaskStart,由它再建立4个任务Task1、Task2、Task3和TaskClk 来完成如下任务:●由Task2和Task3各自来完成一个动画显示任务:在屏幕上依次输出字符“|”、“\”、“-”、“/”,而产生一个向左转动和一个向右的动画标志;●由TaskClk来获取系统时间并显示;●由Task1来初始化屏幕,创建其他4个任务和检查所有5个任务的任务堆栈使用情况并显示出来。
学习实验代码,分析实现过程,观测实验结果,并写出实验报告。
例3-1 在例2-6应用程序的基础上,在OS_CPU_C文件中按如下代码定义函数OSTimeTickHook( ) ,然后运行并查看运行结果。
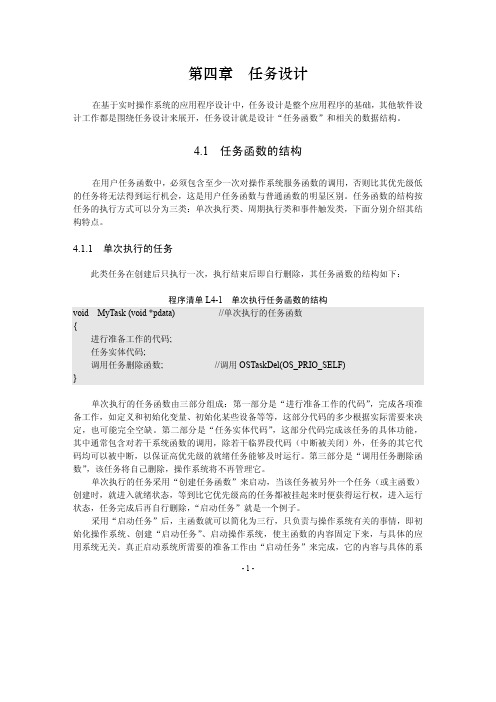
第四章任务设计在基于实时操作系统的应用程序设计中,任务设计是整个应用程序的基础,其他软件设计工作都是围绕任务设计来展开,任务设计就是设计“任务函数”和相关的数据结构。
4.1 任务函数的结构在用户任务函数中,必须包含至少一次对操作系统服务函数的调用,否则比其优先级低的任务将无法得到运行机会,这是用户任务函数与普通函数的明显区别。
任务函数的结构按任务的执行方式可以分为三类:单次执行类、周期执行类和事件触发类,下面分别介绍其结构特点。
4.1.1 单次执行的任务此类任务在创建后只执行一次,执行结束后即自行删除,其任务函数的结构如下:程序清单L4-1 单次执行任务函数的结构void MyTask (void *pdata) //单次执行的任务函数{进行准备工作的代码;任务实体代码;调用任务删除函数; //调用OSTaskDel(OS_PRIO_SELF)}单次执行的任务函数由三部分组成:第一部分是“进行准备工作的代码”,完成各项准备工作,如定义和初始化变量、初始化某些设备等等,这部分代码的多少根据实际需要来决定,也可能完全空缺。
第二部分是“任务实体代码”,这部分代码完成该任务的具体功能,其中通常包含对若干系统函数的调用,除若干临界段代码(中断被关闭)外,任务的其它代码均可以被中断,以保证高优先级的就绪任务能够及时运行。
第三部分是“调用任务删除函数”,该任务将自己删除,操作系统将不再管理它。
单次执行的任务采用“创建任务函数”来启动,当该任务被另外一个任务(或主函数)创建时,就进入就绪状态,等到比它优先级高的任务都被挂起来时便获得运行权,进入运行状态,任务完成后再自行删除,“启动任务”就是一个例子。
采用“启动任务”后,主函数就可以简化为三行,只负责与操作系统有关的事情,即初始化操作系统、创建“启动任务”、启动操作系统,使主函数的内容固定下来,与具体的应用系统无关。
真正启动系统所需要的准备工作由“启动任务”来完成,它的内容与具体的系- 1 -- 2 -统密切相关。


Ucos-II基础原理讲解,任务创建及中断问题2013-6-26 周三Haibara AI Ucos-II在移植过程中的特性,首先要理解所加入的实时操作系统是一个给予定时器节拍的系统。
怎么理解这个问题呢,由该定时器产生脉冲来驱动不同的任务调度,且由于该系统是基于可剥夺内核类型,任务之间的切换时间间隔也由该定时器完成。
不宜过大,否则会造成CPU利用率不高,不宜过小,否则会造成CPU在执行任务时非常被动,时间特别赶。
就想人的心脏一样,动力是固定的,你非要去跑个100公里,心脏不加速你是会窒息而死的。
我们正常心脏跳动是60次左右,同样,单片机也需要一个这样的相对宽松的节拍驱动。
注:众所周知,脉冲本质上仍由晶振提供(或实时时钟),原理都一样,再次请各位不要较真,就暂时以晶振为例。
大家可以考虑一下,晶振的作用是否特别类似于人体的心脏呢?答案是很显然的。
心脏跳动给人体提供输送血液和养料的压力,晶振的设计原理也正是源于此。
他可以像人体心脏一样提供动力输送各个外设(相当于人体器官)所需要的能量。
说这么多,就是要大家理解,人可以实时做出反应,因为人是有生命的,也就是他有反应、判断和处理能力,可以决定什么时间应该做什么。
但是单片机是没有生命的,换句话说,他所谓的处理能力源于人们的代码和程序。
那么,怎么让单片机像人一样拥有生命呢?答案很简单,给他指令,帮助他决定什么时间该做什么,这也就是所谓的实时操作系统。
不只是ucos,其他实时操作系统也是这个道理。
下面我以代码为例,讲述一下ucos的工作流程,如有错误,还请各位前辈指点。
首先任务是怎么样开始执行的?os_err = OSTaskCreateExt((void (*)(void *)) App_TaskStart, */1 (void * ) 0, 2(OS_STK * )&App_TaskStartStk[APP_TASK_START_STK_SIZE - 1],3(INT8U ) APP_TASK_START_PRIO,4(INT16U ) APP_TASK_START_PRIO,5(OS_STK * )&App_TaskStartStk[0],6(INT32U ) APP_TASK_START_STK_SIZE,7(void * )0,8(INT16U )(OS_TASK_OPT_STK_CLR | OS_TASK_OPT_STK_CHK));9这个东西好像是非常复杂,但是实际上并不需要细究(当然非要细究也是允许的,只不过是C语言而已,看也不是看不懂,对于初学者而言并不推荐而已)。

班级学号姓名同组人实验日期室温大气压成绩实验二 UCOS-II任务管理一、实验目的1、掌握UCOS-II中任务管理的函数的应用。
2、掌握UCOS-II在STM32平台下对硬件的控制。
3、掌握开发UCOS-II应用的程序结构。
二、实验步骤1、UCOSII工作原理UCOSII提供系统时钟节拍,实现任务切换和任务延时等功能。
这个时钟节拍由OS_TICKS_PER_SEC(在os_cfg.h中定义)设置,一般我们设置UCOSII的系统时钟节拍为1ms~100ms。
本次实验利用STM32的SYSTICK定时器来提供UCOSII时钟节拍。
UCOSII的任何任务都是通过一个叫任务控制块(TCB)的东西来控制的,每个任务管理块有3个最重要的参数:(1)任务函数指针;(2)任务堆栈指针;(3)任务优先级。
在UCOSII中,使用CPU的时候,优先级高(数值小)的任务比优先级低的任务具有优先使用权,即任务就绪表中总是优先级最高的任务获得CPU使用权,只有高优先级的任务让出CPU使用权(比如延时)时,低优先级的任务才能获得CPU使用权。
UCOSII不支持多个任务优先级相同,也就是每个任务的优先级必须不一样。
任务的调度其实就是CPU 运行环境的切换,即:PC指针、SP指针和寄存器组等内容的存取过程UCOSII的每个任务都是一个死循环。
每个任务都处在以下5种状态之一的状态下,这5种状态是:睡眠状态、就绪状态、运行状态、等待状态(等待某一事件发生)和中断服务状态。
睡眠状态,任务在没有被配备任务控制块或被剥夺了任务控制块时的状态。
就绪状态,系统为任务配备了任务控制块且在任务就绪表中进行了就绪登记,任务已经准备好了,但由于该任务的优先级比正在运行的任务的优先级低,还暂时不能运行,这时任务的状态叫做就绪状态。
运行状态,该任务获得CPU使用权,并正在运行中,此时的任务状态叫做运行状态等待状态,正在运行的任务,需要等待一段时间或需要等待一个事件发生再运行时,该任务就会把CPU的使用权让给别的任务而使任务进入等待状态。
实验 3 任务的创建、挂起与恢复课程名称:嵌入式操作系统 B1、实验目的理解任务管理的基本原理,了解任务的各个基本状态及其转换过程;掌握µC/OS-II 中任务管理的基本方法(创建、启动、挂起、恢复任务);熟练使用µC/OS-II 任务管理的基本系统调用。
理解任务的创建、挂起与恢复的原理及功能,掌握任务创建、挂起与恢复的实现过程。
2、实验内容(1)设计 Task0、Task1 两个任务:任务 Task0 不断地挂起自己,再被任务 Task1 解挂,两个任务不断地切换执行,并输出两个任务在各个时刻的状态。
Task0 的主要功能是显示 Task1 的状态,Task1 的主要功能是显示 Task0 的状态。
整个应用的运行流程如图 1 所示,其描述如下:在 main 函数创建起始任务 TaskStart,其优先级为 0。
TaskStart 任务主要完成创建 2 个应用任务 Task0、Task1,并挂起自己(不再被其它任务唤醒)。
之后整个系统的运行流程如下:t1 时刻,Task0 开始执行,它运行到 t2 时刻挂起自己;t2 时刻,系统调度处于就绪状态的优先级最高任务 Task1 执行,它在 t3 时刻唤醒 Task0,后者由于优先级较高而抢占 CPU;Task0 执行到 t4 时刻又挂起自己,内核调度 Task1执行;Task1 运行至 t5 时刻再度唤醒 Task0;注意:图中的栅格并不代表严格的时间刻度,而仅仅表现各任务启动和执行的相对先后关系。
(2)设计 MyTask、YouTask、KeyTask 三个任务:MyTask 任务输出 M;YouTask 任务输出 Y,并输出 MyTask 任务的状态;KeyTask 任务从键盘接收字符 Y 或 N,当接收 Y 时挂起 MyTask 任务,当接收 N 时恢复 MyTask 任务。
(3)设计 KeyTask 任务,当从键盘输入+号时动态创建任务,最多可以创建 10 个任务,这 10个任务都执行一个函数 MyTask,要求优先级是(PRIO_BASE+0,1,2,3,4,5,6,7,8,9),还要向不同的任务传递不同的参数(0,1,2,3,4,5,6,7,8,9)给 MyTask 函数,优先级为(PRIO_BASE+0,1,2,3,4,5,6,7,8,9)的任务分别输出数字(0,1,2,3,4,5,6,7,8,9)。
UCOSII操作系统课程设计一、课程目标知识目标:1. 理解UCOSII操作系统的基本原理和核心概念,包括任务管理、时间管理、通信与同步机制;2. 掌握UCOSII的移植方法和配置过程,学会在不同硬件平台上搭建UCOSII 操作系统环境;3. 学会使用UCOSII提供的API进行多任务编程,了解实时操作系统的任务调度和资源管理策略。
技能目标:1. 能够运用C语言在UCOSII环境下编写多任务应用程序,实现任务间的同步与通信;2. 能够分析并解决实际嵌入式系统开发中与操作系统相关的问题,提高系统稳定性和可靠性;3. 掌握UCOSII调试技巧,能够运用调试工具对操作系统运行状态进行跟踪和分析。
情感态度价值观目标:1. 培养学生对操作系统知识的好奇心和探索精神,激发学习兴趣和热情;2. 培养学生具备良好的团队合作精神和沟通能力,提高解决实际问题的能力;3. 增强学生的创新意识,鼓励他们在实际项目中积极尝试和应用所学知识。
课程性质:本课程为高年级专业课,以实际应用为导向,注重理论与实践相结合。
学生特点:学生已具备一定的C语言编程基础和嵌入式系统知识,具有较强的学习能力和实践能力。
教学要求:教师需采用项目驱动教学法,引导学生通过实际案例掌握UCOSII 操作系统的应用与开发。
在教学过程中,关注学生的个体差异,提供个性化指导,确保课程目标的实现。
同时,注重培养学生的自主学习能力和创新能力,为将来的职业发展打下坚实基础。
二、教学内容1. UCOSII操作系统概述:介绍实时操作系统的基本概念、特点及应用场景,引出UCOSII的背景、架构和优势。
教材章节:第一章 实时操作系统概述2. UCOSII内核原理:讲解UCOSII的核心组件,包括任务管理、时间管理、通信与同步机制等。
教材章节:第二章 UCOSII内核原理3. UCOSII移植与配置:介绍在不同硬件平台上移植和配置UCOSII的方法,以实际案例为例进行讲解。
北航ARM9嵌⼊式系统实验实验三uCOS-II实验实验三 uCOS-II实验⼀、实验⽬的在内核移植了uCOS-II 的处理器上创建任务。
⼆、实验内容1)运⾏实验⼗,在超级终端上观察四个任务的切换。
2)任务1~3,每个控制“红”、“绿”、“蓝”⼀种颜⾊的显⽰,适当增加OSTimeDly()的时间,且优先级⾼的任务延时时间加长,以便看清三种颜⾊。
3)引⼊⼀个全局变量BOOLEAN ac_key,解决完整刷屏问题。
4)任务4管理键盘和超级终端,当键盘有输⼊时在超级终端上显⽰相应的字符。
三、预备知识1)掌握在EWARM 集成开发环境中编写和调试程序的基本过程。
2)了解ARM920T 处理器的结构。
3)了解uCOS-II 系统结构。
四、实验设备及⼯具1)2410s教学实验箱2)ARM ADS1.2集成开发环境3)⽤于ARM920T的JTAG仿真器4)串⼝连接线五、实验原理及说明所谓移植,指的是⼀个操作系统可以在某个微处理器或者微控制器上运⾏。
虽然uCOS-II的⼤部分源代码是⽤C语⾔写成的,仍需要⽤C语⾔和汇编语⾔完成⼀些与处理器相关的代码。
⽐如:uCOS-II在读写处理器、寄存器时只能通过汇编语⾔来实现。
因为uCOS-II 在设计的时候就已经充分考虑了可移植性,所以,uCOS-II的移植还是⽐较容易的。
要使uCOS-II可以正常⼯作,处理器必须满⾜以下要求:(1)处理器的C编译器能产⽣可重⼊代码可重⼊的代码指的是⼀段代码(如⼀个函数)可以被多个任务同时调⽤,⽽不必担⼼会破坏数据。
也就是说,可重⼊型函数在任何时候都可以被中断执⾏,过⼀段时间以后⼜可以继续运⾏,⽽不会因为在函数中断的时候被其他的任务重新调⽤,影响函数中的数据。
(2)在程序中可以打开或者关闭中断在uCOS-II中,可以通过OS_ENTER_CRITICAL()或者OS_EXIT_CRITICAL()宏来控制系统关闭或者打开中断。
这需要处理器的⽀持,在ARM920T的处理器上,可以设置相应的寄存器来关闭或者打开系统的所有中断。