FANUC人机界面教程
- 格式:pdf
- 大小:5.47 MB
- 文档页数:81
FANUC机器人操作指南1.机器人启动和关机步骤1:确认机器人和控制箱的电源已经连接好,确保电源开关处于关闭状态。
步骤2:打开机器人控制箱的电源开关,并等待系统自检完成。
步骤3:打开机器人外部控制器的电源开关。
步骤4:通过外部控制器的操作界面,启动机器人系统。
步骤5:机器人启动完成后,进行相关安全检查,确保安全栅门和急停按钮处于正常工作状态。
步骤6:进行机器人的关机操作时,先按下外部控制器上的停止按钮,然后按下机器人控制箱上的关机按钮。
2.示教及程序运行步骤1:将机器人切换到手动模式,通过示教器进行机器人的示教操作。
步骤2:通过示教器输入机器人运动的各个参数,如速度、位置等。
步骤3:示教完成后,将机器人切换到自动模式。
步骤4:通过外部控制器的操作界面,加载并运行机器人的程序。
步骤5:在程序运行过程中,及时观察机器人的运动状态,确保其正常运行。
步骤6:如有需要,可以通过外部控制器的操作界面对机器人进行实时监控和干预。
3.安全注意事项为保障操作人员的安全,使用FANUC机器人时需要注意以下事项:1)在机器人运行时,人员应与机器人保持一定的安全距离,并避免将手部或其他物体靠近机器人工作区域。
2)在启动机器人前,需要确保安全栅门和急停按钮处于正常工作状态。
3)在机器人运行过程中,不得随意打开安全栅门或触动急停按钮。
4)在操作机器人时,注意避开机器人的运动轨迹,避免被机器人工具或其他部件碰撞。
以上是关于FANUC机器人操作的简要介绍,通过掌握基本的操作流程和注意事项,能够更好地使用和管理FANUC机器人,提高生产效率和安全性。
2008年10月第1版ROBOGUIDE 使用手册(弧焊部分基础篇)目录目录 0第一章概述 (2)1.1. 软件安装 (2)1.2. 软件注册 (2)1.3. 新建Workcell的步骤 (3)1.3.1. 新建 (3)1.3.2. 添加附加轴的设置 (9)1.4. 添加焊枪,TCP设置。
(15)1.5. Workcell的存储目录 (18)1.6.鼠标操作 (19)第二章创建变位机 (21)3.1.利用自建数模创建 (21).快速简易方法 (21).导入外部模型方法 (31)3.2.利用模型库创建 (42).导入默认配置的模型库变位机 (42).手动装配模型库变位机 (45)第三章创建机器人行走轴 (50)3.1. 行走轴-利用模型库 (50)3.2. 行走轴-自建数模 (57)第四章变位机协调功能 (63)4.1. 单轴变位机协调功能设置 (63)4.2. 单轴变位机协调功能示例 (72)第五章添加其他外围设备 (73)第六章仿真录像的制作 (76)第一章概述1.1. 软件安装本教程中所用软件版本号为V6.407269正确安装ROBOGUIDE ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。
安装完SimPRO后再安装WeldPro。
安装完,会要求注册;若未注册,有30天时间试用。
如果需要用到变位机协调功能,还需要安装MultiRobot Arc Package。
1.2. 软件注册注册方法:打开WeldPRO程序,点击Help / Register WeldPRO弹出如下窗口,1.3. 新建Workcell的步骤1.3.1. 新建在Name 一栏输入文件名,文件名要以字母开头。
单选项第一项“根据缺省配置新建”;第二项“根据上次使用的配置新建”;第三项“根据机器人备份文件来创建”;第四项“根据已有机器人的拷贝来新建”;一般都选用第一项。
选择机器人的软件版本:V6.** 是针对R-J3iB 控制器,V7.**是应用在R-30iA控制器的。
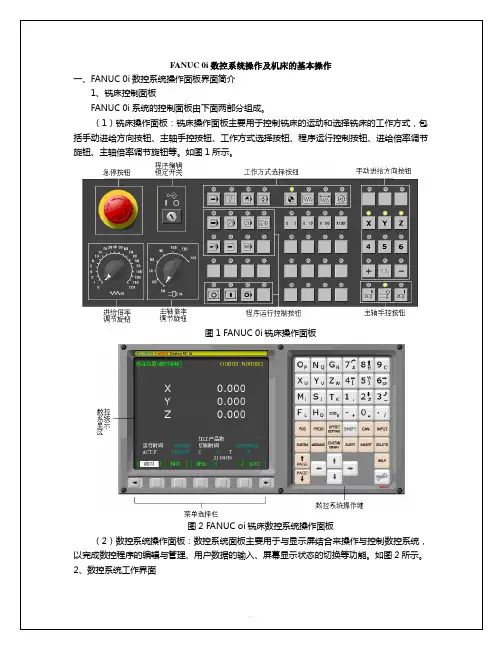
FANUC 0i数控系统操作及机床的基本操作一、FANUC 0i数控系统操作面板界面简介1、铣床控制面板FANUC 0i系统的控制面板由下面两部分组成。
(1)铣床操作面板:铣床操作面板主要用于控制铣床的运动和选择铣床的工作方式,包括手动进给方向按钮、主轴手控按钮、工作方式选择按钮、程序运行控制按钮、进给倍率调节旋钮、主轴倍率调节旋钮等。
如图1所示。
图1 FANUC 0i铣床操作面板图2 FANUC oi铣床数控系统操作面板(2)数控系统操作面板:数控系统面板主要用于与显示屏结合来操作与控制数控系统,以完成数控程序的编辑与管理、用户数据的输入、屏幕显示状态的切换等功能。
如图2所示。
2、数控系统工作界面数控系统的工作状态不同,数控系统显示的界面也不同,一般数控系统操作面板上都设置工作界面切换按钮,工作界面包括加工界面、程序编辑界面、参数设定界面、诊断界面、通信界面等。
特别注意:有时只有选择特定的工作方式,并进入特定的工作界面,才能完成特定的操作。
(1)加工界面用于显示在手动、自动、回参考点等方式机床的运行状态,包括各进给轴的坐标、主轴速度、进给速度、运行的程序段等,如图3所示。
图3 FANUC 0i 数控铣床加工界面(2)程序编辑界面用于编辑数控程序并对数控程序文件进行相应文件的管理,包括编辑、保存、打开等功能,如图4所示。
图4 FANUC 0i 数控铣床程序编辑界面(3)参数设定界面用于完成对机床各种参数的设置,包括刀具参数、机床参数、用户数据、显示参数、工件坐标系设定等,如图5所示。
图5 FANUC 0i 数控铣床参数设定界面二、FANUC 0i数控系统操作面板介绍FANUC 0i 铣床数控系统操作面板除显示屏幕以外,包括以下几个键区:菜单选择键、数字字母键等。
数控系统操作面板是FANUC 0i铣床数控系统的主要人机界面,主要完成操作人员对数控系统的操作、数据的输入和程序的编制等工作。
FANUC 0i数控系统的操作面扳如图6所示。
FANUC人机界面教程首先,让我们来了解一下FANUC人机界面的基本组成。
FANUC人机界面通常由一个触摸屏显示器组成,您可以通过触摸屏来输入指令和进行选择。
触摸屏的菜单栏通常位于屏幕的顶部,并提供了各种选项和功能。
接下来,我们来了解一下FANUC人机界面的基本操作。
要启动FANUC人机界面,您需要按下机器人控制器上的电源按钮。
一旦启动完成,屏幕上会显示出FANUC的图标。
您可以使用触摸屏上的按键或手指滑动屏幕来选择不同的选项。
一旦您选择了一个选项,您可以使用触摸屏的键盘来输入相关参数或命令。
除了基本的操作,FANUC人机界面还提供了一些高级功能,以帮助您更好地使用机器人。
例如,您可以通过设置菜单来调整机器人的工作速度和加速度,以及设置不同工作模式下的机器人行为。
您还可以设置机器人的安全参数,例如最大工作范围和碰撞检测等。
这些高级功能使您能够灵活地控制机器人的工作,并确保其安全性。
此外,FANUC人机界面还提供了一些实用的工具和功能,以帮助您更高效地使用机器人。
例如,您可以使用示教模式来手动控制机器人的运动,并记录下运动路径以供以后使用。
您还可以使用监控模式来实时监测机器人的状态和工作进度。
FANUC人机界面还支持网络连接,使您能够通过远程操作控制机器人。
最后,我们还要注意FANUC人机界面的一些保养和故障排除技巧。
为了保持界面的正常运行,您应该定期清洁屏幕和保持触摸屏的敏感度。
如果您遇到界面无响应或错误的情况,您可以尝试重新启动机器人控制器并更新软件版本。
总的来说,FANUC人机界面是一个功能强大且易于使用的工具,可帮助您更好地控制和监控FANUC机器人的工作。
通过学习和熟悉界面的基本操作和设置,您将能够更高效地操作机器人,并提高生产效率。
希望本文对您有所帮助!。

contents •FANUC机器人概述•FANUC机器人硬件组成•FANUC机器人软件编程•FANUC机器人操作与维护•FANUC机器人应用案例•FANUC机器人发展趋势与展望目录01FANUC机器人概述FANUC公司简介FANUC公司是一家专业从事工业机器人和工厂自动化设备的研发、生产和销售的公司。
FANUC公司拥有丰富的机器人技术和经验,是全球领先的工业机器人制造商之一。
FANUC公司的机器人产品广泛应用于汽车、电子、机械、食品等各个领域。
汽车制造电子产品制造机械加工食品生产第一代FANUC机器人01第二代FANUC机器人02第三代FANUC机器人0302FANUC机器人硬件组成控制器与执行器控制器执行器传感器与检测装置位置传感器姿态传感器视觉传感器辅助装置与配件示教器安全防护装置末端执行器03FANUC机器人软件编程编程语言介绍FANUC机器人编程语言编程语言特点编程环境搭建硬件要求软件安装试。
配置与调试示例程序程序解析调试与运行编程实例演示详细解析示例程序中的各个部分,包括程序结构、语法规则、变量定义、函数调用等,以帮FANUC机器人调试和运行,观察机器人的运动轨迹和执行结果,以验证程序的正确性和可行性。
04FANUC机器人操作与维护操作界面介绍显示机器人状态、程序列表、IO状态等重要信息。
用于编写、修改和调试机器人程序。
实时监测机器人运行状态,包括关节角度、速度、负载等。
设置机器人运行参数,如加速度、减速度、运动范围等。
主界面程序编辑界面监控界面参数设置界面基本操作演示01020304开机与关机程序编写与执行手动操作自动运行维护与保养指南日常维护定期检查故障诊断与排除预防性维护05FANUC机器人应用案例焊接应用案例汽车制造FANUC机器人在汽车制造领域广泛应用于焊接工艺,如车身焊接、零部件焊接等,提高生产效率和焊接质量。
船舶制造在船舶制造过程中,FANUC机器人可承担大型构件的焊接任务,减少人工操作难度,提升焊接速度和精度。
FANUC操作说明书FANUC操作说明书一、简介本操作说明书介绍了FANUC的基本操作和功能,旨在帮助用户了解的使用方法和注意事项。
二、安全操作1. 基本安全知识a. 操作前的准备工作,如穿戴适当的防护装备和确保工作区域清洁整齐等。
b. 操作过程中的安全注意事项,如避免与碰撞和保持安全距离等。
2. 紧急停止和故障排除a. 紧急停止按钮的位置和使用方法。
b. 常见故障排除方法和常见问题的解决办法。
三、控制系统1. 控制系统介绍a. 控制器的结构和功能概述。
b. 控制系统的软件和硬件组成。
2. 操作界面a. 操作面板的功能和操作方法。
b. 控制界面的布局和功能按钮介绍。
四、基本运动1. 运动类型a. 关节运动和直线运动的区别和使用场景。
b. 坐标系和轴的定义和切换方法。
2. 运动指令a. 点位运动指令的用法和语法。
b. 相对运动和绝对运动的区别和应用。
五、任务编程1. 基本编程概念a. 任务的组成和编程语言介绍。
b. 任务的编写规范和注意事项。
2. 任务编辑软件a. 常用任务编辑软件的介绍和使用方法。
b. 任务编辑软件的高级功能和调试技巧。
六、外部设备控制1. I/O接口a. 外部设备的接口类型和连接方法。
b. I/O信号的读取和控制方法。
2. 传感器模块a. 常用传感器模块的介绍和使用方法。
b. 传感器模块与的数据交互方式。
附件:1. FANUC操作安全手册2. FANUC编程示例法律名词及注释:1. :根据《使用安全规范》(GB/T 29434-2012)的定义,是一种可编程多功能设备,包括机械结构、动力系统、控制系统和传感器,能够执行多种相对复杂的任务。
2. 控制器:控制系统的核心部分,负责接收和处理指令,控制的运动和操作。
3. I/O接口:输入/输出接口,用于与外部设备之间的数据传输和控制。
4. 传感器模块:用于检测环境变化和获取外部信息的设备,如视觉传感器和力传感器。
FANUC机器人中文简易教程首先,让我们了解FANUC机器人的基本组成。
FANUC机器人主要由控制器、机械臂和外围设备组成。
控制器是机器人的大脑,负责控制机械臂的运动和执行任务的指令。
机械臂是机器人的主体部分,可以实现各种运动和操作。
外围设备包括传感器、工具和输送带等,用于辅助机器人完成任务。
FANUC机器人的基本操作包括启动和关机、模式切换、自动运行和手动操作等。
启动和关机操作非常简单,只需按下控制器上的相应按钮即可。
模式切换有两种,一种是自动模式,机器人会按照事先编写好的程序进行操作;另一种是手动模式,可以通过操作控制器上的按钮来手动控制机械臂的运动。
自动运行是机器人最常用的操作模式,它可以根据事先编写好的程序自动执行任务。
编写FANUC机器人的程序有两种方式,一种是在线编程,即通过机器人手柄上的按钮和显示器进行编程;另一种是离线编程,可以在计算机上使用专门的软件进行编写。
无论采用哪种方式,编写程序的基本原理都是相同的,只是操作界面和方式有所不同。
在编写程序之前,首先需要了解机器人的坐标系和运动控制方式。
FANUC机器人采用的是三维笛卡尔坐标系,即XYZ坐标系。
机器人的位置和姿态可以通过坐标系的表示来描述。
运动控制方式主要有点位运动和路径运动。
点位运动是机器人以点为单位进行运动,可以实现较为精确的位置控制。
路径运动是机器人以路径为单位进行运动,可以实现流畅的运动轨迹。
编写FANUC机器人的程序可以分为以下几个步骤:首先是程序前处理,包括定义数据、声明变量和初始化等。
然后是编写主程序,主程序是机器人执行任务的入口点,主要包括任务调用和指令执行等。
接下来是编写子程序,子程序是主程序的组成部分,可以实现一些重复性的操作。
最后是程序后处理,包括数据保存和文件关闭等。
除了编写程序之外,还可以通过外围设备和传感器实现与机械臂的交互。
例如,可以通过视觉传感器来实现机器人的目标识别和定位;还可以通过力传感器来实现机器人的力控制和力限制等。
fanuc 机器人操作流程Fanuc机器人操作流程一、概述Fanuc机器人是一种先进的工业机器人,被广泛应用于自动化生产线中。
本文将介绍Fanuc机器人的操作流程,包括准备工作、程序加载、安全检查、示教操作、模拟运行和实际操作等步骤。
二、准备工作在操作Fanuc机器人之前,需进行一些准备工作:1. 确保机器人的电源供应正常,连接电源线并启动机器人。
2. 检查机器人的安全装置,如急停按钮和安全围栏等,确保其正常工作。
3. 检查机器人所需的工具和附件是否齐全,如末端执行器、传感器等。
三、程序加载1. 在Fanuc机器人上运行程序之前,需要将程序加载到机器人控制器中。
这可以通过U盘或网络传输等方式实现。
2. 将U盘或其他存储设备插入机器人控制器的接口,通过控制器菜单中的选项将程序导入控制器。
确认导入程序后,将其保存或加载到机器人控制器中。
四、安全检查在进行Fanuc机器人的操作之前,必须进行安全检查,以确保操作的安全性:1. 检查机器人周围的工作环境是否安全,并清除可能干扰机器人操作的障碍物。
2. 确保机器人的安全装置和紧急停止按钮等功能正常,并可随时使用。
3. 检查机器人的末端执行器是否正确安装,并根据需要配置传感器等辅助设备。
五、示教操作1. Fanuc机器人支持示教操作,可以通过示教器或编程设备来完成。
2. 使用示教器或编程设备,按照程序要求,示教机器人的位置、路径、速度等参数。
3. 示例操作需要遵循机器人的示教规范,确保示教的准确性和可靠性。
六、模拟运行在实际操作Fanuc机器人之前,可以进行模拟运行,以验证程序的正确性和机器人的预期行为:1. 在机器人控制器中,选择模拟运行功能,并加载所需的程序。
2. 在模拟运行模式下,机器人会按照程序要求进行模拟操作,但不实际运动。
可以通过观察机器人的模拟操作来验证程序的正确性。
七、实际操作最后,进行Fanuc机器人的实际操作:1. 在机器人控制器中选择实际运行功能,并加载所需的程序。
最完整的fanuc教程一、教学内容本节课我们将学习FANUC的基本操作和编程。
教材涵盖第二章,内容包括:FANUC的硬件和软件结构、操作界面、运动控制、编程语言和示例程序。
二、教学目标1. 学生能够理解FANUC的硬件和软件结构。
2. 学生能够熟练操作FANUC,进行基本运动控制。
3. 学生能够运用FANUC编程语言编写简单的示例程序。
三、教学难点与重点重点:FANUC的硬件和软件结构,操作界面,运动控制,编程语言。
难点:理解FANUC编程语言的语法和结构。
四、教具与学具准备教具:FANUC模拟器。
学具:每人一台计算机,安装有FANUC模拟器。
五、教学过程1. 实践情景引入:介绍FANUC在工业生产中的应用场景,激发学生的学习兴趣。
2. 教材阅读与讲解:学生阅读教材第二章,教师讲解重点内容,解答学生疑问。
3. 示例程序分析:分析教材中的示例程序,讲解程序的运行原理和操作步骤。
4. 随堂练习:学生根据教材中的示例程序,尝试编写自己的程序,教师巡回指导。
5. 小组讨论:学生分组讨论编程过程中的问题,分享解题思路。
六、板书设计板书内容包括:FANUC的硬件结构、软件结构、操作界面、运动控制命令、编程语言关键字。
七、作业设计(1)让移动到坐标(100, 100, 0)。
(2)让进行关节旋转,角度为:关节1旋转90度,关节2旋转180度,关节3旋转90度,关节4旋转180度,关节5旋转90度。
(3)让移动到坐标(0, 0, 0)。
2. 答案:N1 G90 G21N2 G0 X100 Y100 Z0N3 G1 J1.00 J2.00 J3.00 J4.00 J5.00N4 G0 X0 Y0 Z0八、课后反思及拓展延伸本节课学生掌握了FANUC的基本操作和编程,但在实际操作过程中仍存在一些问题,如对编程语言的语法理解不深,运动控制的精度不高等。
在今后的教学中,应加强对学生编程能力的培养,提高学生的动手能力。
拓展延伸:引导学生探索FANUC编程中的高级功能,如视觉识别、力控制等。
FUNAC点焊机器人站操作手册一、设备开机1﹒开启水源球阀、气压球阀,确认外部主电源220VAC机器人电源、440VAC焊接用电源已开启。
2﹒开启机器人电源(主旋转开关转向上,机器人电源开关按下ON,此时机器人电源灯亮起,进行开机约需30秒)。
3﹒按下设备启动绿色按纽,2秒后上方的塔灯,绿色灯亮起,请注意此时若红灯也亮起,请至PLC箱看异常讯息查看何项设备有异常(若紧急停止按着,绿色灯不会亮,设备不会启动)。
4﹒请确认机器人教导器,左边第三个STEP灯未亮起(若有亮绿灯,请按STEP按纽消除)确认教导器ON/OFF开关切至OFF,确定异常灯未亮红灯(若有请按复归),确认机器人程序已归零,可进行维护呼叫作确认。
此时设备已开启,可进行生产。
二、设备关机1﹒按下设备停止红色按纽,此时塔灯绿灯熄灭,若塔灯红色灯有闪烁,请按警报停止红色按纽。
2﹒按下机器电源开关变OFF,此时机器人电源灯熄灭,机器人即关机完成;若要长时间停机(超过一天),请将下方的电源总开关旋转至水平OFF位置。
3﹒关闭水源、气源,及焊接440VAC电源。
三、机器人预约程序1﹒请确认所有滑台皆在外围,且滑台气缸上的外定位磁簧有感应亮灯。
此时按下预约纽,预约灯亮起(若外定位未感应到,则无法预约)。
2﹒PLC依滑台工程1、2、3、4,次序扫描,当本站预约扫描到此时检查夹具感应Sensor是否有感应到(检知为X2A、X2B、X2C、X2D、X2E共五个讯号ON, X28,X29讯号OFF;,若未符合条件,此时预约灯会自动熄灭,塔灯红色异常灯闪烁,人机界面异常讯息会出现本站夹具夹紧检知异常,或板件检知异常,错误讯息未按警报停止清除将一直存在, 但若再次预约而且检查正常,此时错误讯息消除。
3﹒滑台检知正常,机器人移动即往夹具,在机器人未动作之前按下取消,可停止程序继续进行, 焊接中途若要夹具打开,请将中途打开之传感器接至X2F。
4﹒滑台前进到前定位,前定位感应磁簧灯亮起,即开始机器人呼叫启动程序,若机器人未待机(教导器未切OFF,教导器在步进STEP灯亮状态,机器人在其他程序程序中未完成,程序未归零,机器人异常灯亮起有异常讯息,共四种状态)则无法启动机器人,此时塔灯异常红灯亮起,人机界面显示本站机器人启动异常,程序停止,请将设备停止按下,手动将滑台后退,复原机器人至待机(A:STEP灯OFF、B:教导器OFF、C:FCTN+ENTER程序归零),重新按设备启动后重来。
工业入门实用教程(FANUC)一、教学内容本节课我们将学习FANUC入门知识,了解的基本组成、操作界面及其功能。
教材涵盖FANUC硬件结构、软件操作、基本编程和操作技巧。
内容包括:1. FANUC的硬件组成及功能;2. 操作界面及操作方法;3. 基本编程及操作。
二、教学目标1. 学生能了解FANUC的硬件组成及功能;2. 学生能熟悉操作界面及操作方法;3. 学生能掌握基本编程及操作技巧。
三、教学难点与重点重点:FANUC的硬件组成、软件操作及基本编程。
难点:路径规划、坐标系转换、编程逻辑。
四、教具与学具准备教具:FANUC模型、操作面板、编程软件。
学具:笔记本电脑、编程器、示教器。
五、教学过程六、板书设计板书内容涵盖:FANUC硬件组成、操作界面、基本编程。
七、作业设计1. 请简述FANUC的硬件组成。
2. 请画出FANUC的操作界面示意图。
3. 编写一段FANUC基本编程,实现的直线运动。
八、课后反思及拓展延伸课后反思:本节课学生掌握了FANUC的基本知识,但在路径规划、坐标系转换等方面仍需加强。
拓展延伸:研究FANUC的高级编程技术,探索在工业生产中的应用。
重点和难点解析一、教学内容本节课我们将学习FANUC入门知识,了解的基本组成、操作界面及其功能。
教材涵盖FANUC硬件结构、软件操作、基本编程和操作技巧。
内容包括:1. FANUC的硬件组成及功能;2. 操作界面及操作方法;3. 基本编程及操作。
重点和难点解析:在教学内容中,我们需要重点关注FANUC的硬件组成及其功能,操作界面及其操作方法,以及基本编程及操作技巧。
这些内容是学生理解FANUC的基础,也是学习后续高级应用的基础。
二、教学目标1. 学生能了解FANUC的硬件组成及功能;2. 学生能熟悉操作界面及操作方法;3. 学生能掌握基本编程及操作技巧。
重点和难点解析:教学目标是学生学习的结果,也是我们教学的出发点。
在教学过程中,我们需要关注学生对FANUC硬件组成、操作界面及编程技巧的掌握程度,以确保教学目标的实现。
加工中心FANUC 系统操作面板功能键及开关的使用方法2010年01月21日星期四03:29第一课加工中心FANUC 系统操作面板功能键及开关的使用方法一、FANUC 系统操作面板功能键的含义三、开关的使用方法:设定自动运行方式 .:设定程序编辑方式 .:设定MDI方式: 设定DNC 运行方式 .: 单程序段运行方式 .: 可选程序段跳过运行方式, 跳过程序段开头带有/ 的程序 .: 程序停止 .: 手动示教( 手轮示教) 方式 .: 程序重启 .: 机床机械锁住 .: 空运行方式 .: 循环停止 .( 自动操作停止).: 循环启动 .( 自动操作开始).: 程序停 .( 进给保持).: 返回参考点方式 .:手动进给方式 .: 手轮进给方式 .: 手轮进给倍率: 手动进给轴选择 .: 快速进给 .: 移动方向选择 .: 主轴, 正转, 停止, 反转 .: 进给倍率 .:主轴转速倍率: 紧急停止: 程序保护开关六、小结:加工中心慨况及面板操作七、作业:操作面板,熟练面板各个功能键第二课加工中心加工工件的安装、对刀与换刀加工中心加工定位基准的选择:1.选择基准的三个基本要求:(1)所选基准应能保证工件定位准确装卸方便方便可靠。
(2)所加工精度。
2.选择定位基准6原则:(1)尽量选择设计基准作为定位基准;(2)定位基准与设计基准不工件需两次以上装夹加工时,所选基准在一次装夹定位能完成全部关键精度部位的加工;(4)所加工时,零件定位基准应尽可能与建立工件坐标系的对刀基准重合;(6)需要多次装夹时,基准加工中心夹具的确定:1.对夹具的基本要求:(1)夹紧机构不得影响进给,加工部位要敞开;(2)夹具在机床上能实2.常用夹具种类:(1)通用夹具:如虎钳、分度头、卡盘等;(2)组合夹具:组合夹具由一套件所构成;(3)专用夹具:专为某一项或类似的几项加工设计制造的夹具;(4)可调整夹具:装夹更具灵活性;(5)多工位夹具:可同时装夹多个工件的夹具;(6)成组夹具:专门用于形似的工件的装夹。
FANUC系统人机界面设计摘要:随着工业控制系统对用户操作界面提出了越来越高的要求,FANUC数控系统人机界面软件PICTURE,在机床数控界面二次开发中,得到普遍应用。
关键词:FANUC;人机界面;PICTUREHuman machine interface design of FANUC systemWang Rui(General Technology Group Dalian Machine Tool CO.LTD ,Liaoning Dalian 116620 ,CHN)Abstract: With the development of industrial control system, the user interface has become more and more important,Fanuc CNC human-machine interface software PICTURE,it is widely used in the secondary development of NC interface of machine tools.Keywords: FANUC Human machine interface PICTUREFANUC系统人机界面,顾名思义是配有FANUC控制系统的设备与操作人员之间的对话窗口。
由于系统操作对操作人员有一定的技术要求,FANUC系统PICTURE软件可以对人机界面进行二次开发,简化界面显示操作,方便基础操作人员的使用。
1.FANUC系统人机界面设计通常有以下几个要点:(1)设计基本原则客户至上是每个设计员都需要秉承的基本原则,人机界面的二次开发同样需要以客户为中心。
设计员需要根据客户的设计要求,用户的使用习惯,根据实际情况,完成整个设计过程。
设计中需要不断跟客户沟通,征求用户的意见,对自己的设计思路不断优化,满足客户对人机界面的要求。