ROTORK3代调试步骤
- 格式:doc
- 大小:1.21 MB
- 文档页数:6

IQ系列安全使用、安装、基本设定及维护手册此手册包含了安全方面的重要内容,请确保在安装、操作或维护设备之前通读并理解此方面内容。
PUB002-039-00出版时间11/12目录1. 简介 _________________________________ 31.1. 执行器部件识别 (3)1.2. Rotork设定器 (4)1.3. 手册简介 (5)2. 健康与安全 ___________________________ 52.1. ATEX/IECFM认证的执行器 (6)3. 保存 _________________________________ 64. IQ执行器的操作 ______________________ 74.1. 手轮操作 (7)4.2. 电动操作 (7)4.3. 显示–就地指示 (8)4.4. 显示-主屏幕选项 (9)4.5. 显示状态指示-行程 (10)4.6. 显示状态指示-控制 (10)4.7. 显示报警指示 (10)4.8. 电池报警 (10)5. 准备驱动轴套 _________________________ 115.1. IQ所有的A、Z3型底座 (11)5.2. B型非推力底座 (12)6. 安装执行器 __________________________ 136.1. 提升杆式阀门 - 顶装 (14)6.2. 带齿轮箱的阀门 - 侧装 (14)6.3. 非提升杆式阀门 - 顶装 (14)6.4. 手轮密封 (15)6.5. IQM调节型执行器 (15)6.6. IQL和IQML直行程驱动装置 (15)6.7. IQL和IQML直行程驱动装置的调试 (16)7. 电缆连接 ____________________________ 177.1. 接地连接 (17)7.2. 卸下接线端子箱盖 (17)7.3. 电缆入口 (17)7.4. 连接至端子 (18)7.5. 回装接线端盖 (18)8. 调试 - 基本设定 ______________________ 198.1. 连接至执行器 (20)8.2. 安全 - 口令 (21)8.3. 基本设定菜单 (22)8.4. 基本设定 - 限位 (23)8.5. 关阀设定 (24)8.6. 开阀设定 (24)8.7. 力矩开关旁路 (25)9. 维护、监视及故障排除_________________ 2610. 环保处理 ____________________________ 2811. 重量和油量 __________________________ 2912. IQ认证 _____________________________ 3013. 认可的保险丝 ________________________ 3114. 振动、冲击和噪音 ____________________ 3115. 安全使用条件 ________________________ 3121.简介1.1.执行器部件识别手轮控制器盖电机底座接线端子箱盖电池密封塞金属(需要8 mm艾伦内六角扳手)塑料(需要10 mm艾伦内六角扳手)酌情而定。
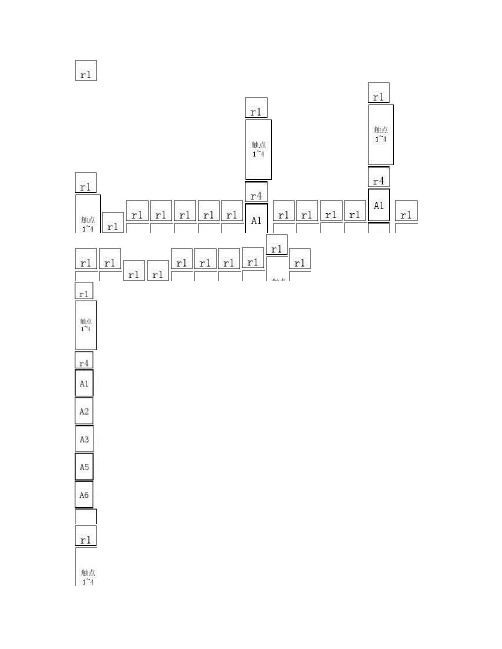
附件触点no 附加触点开启OF 附件触点关闭
阀位输出信号HI 20mA对于阀门全开Lo 20mA对于阀门全关CL关阀动作OP开阀动作
位置动作值0~100%
no常开触点nc常闭触点
CL关阀动作OP开阀动作
位置动作值0~100%
no常开触点nc常闭触点
条件控制(远程+连锁no 远程+连锁方可控制OF 无条件控制(默认力距开关旁路
no 0~5;95~100力距被旁路OF 力距开关起作用(默认
ESD超越连锁控制no ESD超越连锁控制OF ESD在连锁控制后ESD超越就地停止no ESD超越就地停止OF ESD在就地停止后就地控制自保持no 就地旋钮控制自保持OF 就地控制按钮点动op 两线控制开阀优先sp 两线控制停阀优先cl 两线控制关阀优先外部连锁on 外部连锁开启oF 外部连锁关闭
CL ESD时关阀SP ESD时保位OP ESD时开阀
ESD触点形式no 闭合时触点有效nc 断开时触点有效
ESD时温度保护旁路no 温度保护被旁路nc 温度保护可使用
oF Folomatic设定屏幕关闭no Folomatic设定屏幕开启(开启可引出设定菜单FI~FF
点信号的型式I 控制型号为电流U 控制信号为电压
点信号的范围20 0~20mA 10 0~10mA
阀门低位点信号26(+、27(-
4mA
阀门高位点信号26(+、27(-
20mA
反向动作时间5 5“反向动作
点信号丢失的响应no 运行方向由FF决定
OF 断信号全关
LO
no 运行方向由FF决定
OF 断信号全关
死区的调整12 1.2%5 0.5%。

Rotork电动执行机构调试步骤
1. 接线
接线箱中,
1;2;3端接380V AC电源,没有相序之分
将4和41短接
将5和39短接
22和23接反馈信号
26和27接4 –20mA模拟信号
2. 一级设定
显示阀位信息状态
进入二级设定(一级设定完成后才能做二级设定)
C2 (关阀方式) C3 (开阀方式)
(Ct设定OL行程开并确认
TO (关阀力矩) TO (开阀力矩)
一般设定在60一般设定在65左右
LC (设定关阀限位) LO (设定开阀限位)
手动全开阀门并确认
3. 二级设定
Fr(20) Fd(10) Ft(03)
范围
设定10并确认
返回到阀位信息状态
注意:
*: 此时将阀门全关,并给定4mA的模拟信号,按确认键直到关指示闪烁
#: 此时将阀门全开,并给定20mA的模拟信号,按确认键直到开指示闪烁。

ROTORK电动执行器操作规程一、就地控制的电动操作1、开机前检查(1)确认手动/自动选择手柄的确脱离手动定位,已经复位于初始位置;(2)确认电源电压与执行器铭牌上的标称相符,即可开启电源;(3)确认电动执行器处于电源连通状态,液晶显示屏的淡黄色背景灯和一个指示阀位的指示灯也将点亮,显示屏上可以看到阀门开启的百分数或行程末端的符号;(4)确认红色选择器,被锁定在LOCAL(现场控制)位置;(5)最后确认该电动执行机构,正确进入待机状态。
2、开启阀门(1)旋启红色选择器于OPEN(2)显示器上红色指示灯闪烁,液晶显示屏上显示●%-OPEN电动执行器驱动阀门处于全开位置3、关闭阀门(1)旋启红色选择器于CLOSE(2)显示器上绿色指示灯闪烁,液晶显示屏上显示●%-CLOSE电动执行器驱动阀门处于全关位置4、停止启闭阀门(1)顺时针选择红色选择器至STOP;(2)显示器上黄色指示灯亮;(3)液晶显示屏上显示××%中间位置或某个位置;(4)电动执行器驱动阀门可停在中间任意位置。
二、就地控制的手动操作1、确认执行器电源已断开,电机已停止转动;2、压下手动/自动手柄,使其处于手动定位;3、旋转手轮挂上离合器;4、松开手柄,手动/自动手柄将回到初始位置,手轮轴上的离合器将保持啮合状态;5、操作者顺时针旋转手轮,可关闭阀门,阀门顶端阀位指示器箭头,与管道气体走向垂直,阀门全关;6、操作者逆时针旋转手轮,可开启阀门,阀门顶端阀位指示器箭头,与管道气体走向平行,阀门全开;7、执行器实施电动操作时,手轮将自动脱离手动操作状态。
三、注意事项远程控制功能的实施全部纳入无锡—张家港输气管道SCADA系统统一控制,不属于本规程实施范。
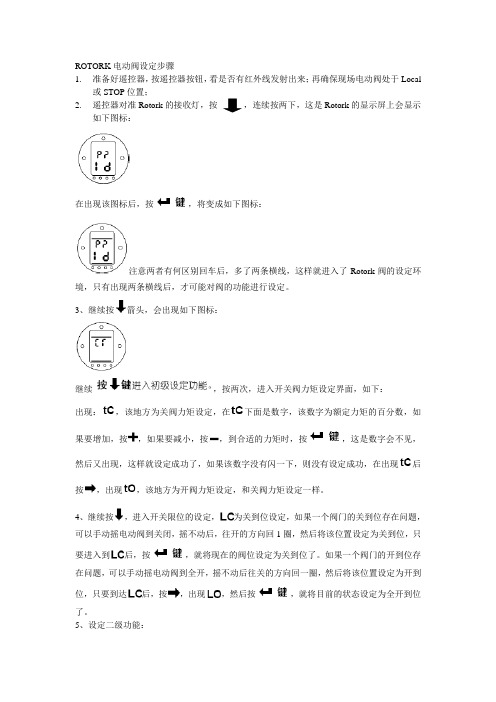
ROTORK电动阀设定步骤1.准备好遥控器,按遥控器按钮,看是否有红外线发射出来;再确保现场电动阀处于Local或STOP位置;2.遥控器对准Rotork的接收灯,按,连续按两下,这是Rotork的显示屏上会显示如下图标:在出现该图标后,按,将变成如下图标:注意两者有何区别回车后,多了两条横线,这样就进入了Rotork阀的设定环境,只有出现两条横线后,才可能对阀的功能进行设定。
3、继续按箭头,会出现如下图标:继续,按两次,进入开关阀力矩设定界面,如下:出现:,该地方为关阀力矩设定,在下面是数字,该数字为额定力矩的百分数,如果要增加,按,如果要减小,按,到合适的力矩时,按,这是数字会不见,然后又出现,这样就设定成功了,如果该数字没有闪一下,则没有设定成功,在出现后按,出现,该地方为开阀力矩设定,和关阀力矩设定一样。
4、继续按,进入开关限位的设定,为关到位设定,如果一个阀门的关到位存在问题,可以手动摇电动阀到关闭,摇不动后,往开的方向回1圈,然后将该位置设定为关到位,只要进入到后,按,就将现在的阀位设定为关到位了。
如果一个阀门的开到位存在问题,可以手动摇电动阀到全开,摇不动后往关的方向回一圈,然后将该位置设定为开到位,只要到达后,按,出现,然后按,就将目前的状态设定为全开到位了。
5、设定二级功能:在出现后,按,就进入了二级功能设定,接下来需要设定的功能参见下图:需要将触点S1设定为:关到位,再将该触点方式设定为常开方式,如右图将S2触点设定为:全开到位,同样将该触点方式设定为常开触点,如右图将S3 触点设定为:正在关状态,同样将该触点设定为常开触点。
将S4触点方式功能设定为正在开状态,同样将该触点设定为常开触点。
下面的功能是对ESD功能的设定:只有在PID流程图上与ESD系统相连相关的Rotork电动阀才需要设定该功能。
具体设定为将A1、A3、A4、A5全部设定为NO,如果是放空阀,将A2设定为OP功能,如果不是放空阀,是进出站阀门,设定为CL功能。

罗德克执行器三代说明书三代罗托克执行器说明书第三代执行器,比以往更*增强了密封性能和可维护性全新设计的屏幕显示简单且稳定的编码器出色的显示–通讯、诊断和人机交互(HMI)可通过蓝牙或红外进行组态减少内部的布线连接支持资产管理“前瞻性设计”–可对所有板件的嵌入式固件程序进行现场升级InsightII提供更好的数据管理远程关阀1显示条灭=远程关阀信号存在ESD1显示条灭=ESD信号存在远程保持信号1显示条灭=远程保持信号存在显示条亮=远程保持信号不存在,且/或远程停止有效。
调试IQ系列执行器无需打开任何电气箱盖!如果由于用户曾经打开过电气箱盖而使执行器受到损坏,Rotork公司不承担任何责任!每一台Rotork执行器在出厂前都已经过检测,如果安装、调试和密封适当,则可提供多年的无故障运行!31手动操作图1压下手动/自动手柄,使其处于手动位置.旋转手轮以挂上离合器,此时松开手柄,手柄将自动弹回初始位置,手轮将保持啮合状态,直到执行器被电动操作,手轮将自动脱离,回到电机驱动状态。
远程开阀2显示条灭=来自总线选项电路板的远程开阀信号存在.远程关阀2显示条灭=来自总线选项电路板的远程关阀信号存在!ESD2显示条灭=来自总线选项电路板的ESD信号存在。
远程保持2显示条灭=来自总线选项电路板的远程保持信号存在。
显示条亮=关阀联锁有效通过带有外部联锁触点的执行器(关阀)联锁控制,可防止未经允许的开阀电动操作.如果不需要外部联锁控制,联锁功能必须选择为[OF]!远程控制未选择显示条亮=未选择远程控制显示条灭=选择远程控制就地关阀信号不存在显示条亮=就地关阀信号不存在显示条灭=就地关阀信号存在就地开阀信号不存在显示条亮=就地关阀信号不存在显示条灭=就地关闭信号存在温度保护跳断显示条亮=温度保护跳断执行器电机带有温度保护如果电机过热,温度保护开关将跳断,执行器将停止运行。
ROTORK电动阀设定步骤第一步:了解阀门和执行器的类型和规格在进行设置之前,了解阀门和执行器的类型和规格对于正确设置非常重要。
需要了解阀门的类型(球阀、蝶阀、闸阀等)、阀门的尺寸和材料,以及执行器的类型和能力等。
第二步:安装执行器首先,确保所有的机械连接已正确安装和连接。
根据执行器的型号和规格,使用适当的支撑和固定装置将执行器安装在阀门上。
第三步:电气连接将执行器的电源线连接到适当的电源。
确保所有的电源线都正确连接,并按照电器图纸上的说明进行连接。
第四步:旋转限位开关设置执行器上通常有两个限位开关,分别对应阀门的全关和全开位置。
根据所需的阀门行程和位置,调整这两个限位开关的位置和角度。
第五步:调整初始位置在设置之前,必须将阀门和执行器手动操作至完全关闭的位置。
通过执行器上的手动操作功能,将阀门手动关闭。
第六步:配置执行器控制器根据系统需求和操作方式,设置执行器控制器的参数。
这些参数可能包括执行器的行程时间、阀门行程的反馈信号、启动和停止模式以及其他相关参数。
根据执行器和控制器的型号和规格,按照相关的操作手册进行配置。
第七步:测试和调整完成以上步骤后,进行测试和调整以确保阀门和执行器的正常工作。
执行器通常具有手动操作功能,可以通过手动操作来检查阀门的行程和操作。
在测试时可以进行一些常规动作,如打开、关闭和调节阀门,以确保执行器和阀门的正常运行。
第八步:记录设置参数在设置完毕后,将所有的设置参数记录下来。
这些设置参数将在以后的操作和维护中非常有用。
以上就是ROTORK电动阀设定的主要步骤。
每个具体的设置过程可能会有所不同,但总体来说,理解阀门和执行器的类型和规格,正确安装执行器,进行电气连接,设置旋转限位开关和初始位置,配置执行器控制器,测试和调整,以及记录设置参数是设置ROTORK电动阀的基本步骤。
ROTORKIQ3调试步骤调试ROTORKIQ3执行器可以按照以下步骤进行。
1.确保安全:在开始调试之前,首先确保你自身的安全,例如佩戴个人防护装备(安全鞋、安全帽、手套等)。
确保执行器周围没有危险物品,并将操作区域标记出来。
2.检查供电电源和电缆:确保供电电源的电压和频率与执行器的要求相匹配。
检查电缆连接是否牢固,并在需要时更换损坏的电缆。
3.连接控制信号:将控制器(PLC或远程终端单元)与执行器的控制信号接线端子相连。
确保线路连接正确并紧固。
4. 连接上位机:将工程师电脑或者调试终端连接到执行器的通讯接口(例如Modbus、Profibus、HART等)。
确认连接正常,并调整相关通讯参数。
5.参数配置:使用上位机软件或者调试终端软件以及执行器的操作界面,配置执行器的参数,例如控制方式(自动、手动、远程等)、控制信号范围、开度范围等。
6.执行器位置校准:在执行器安装在阀门或其他装置上之前,需要对其位置进行校准。
通过上位机软件或者操作界面选择执行器位置校准功能,并按照提示进行操作。
校准时,执行器会根据设定的开度值或者反馈信号自动调整位置,直至达到准确的位置。
7.设定预设开度:根据实际应用需求,通过上位机软件或者操作界面设定执行器的预设开度。
预设开度是指执行器在工作时所需达到的开度值,通常用于调整控制精度和防止过速或者过冲。
8.动作测试:对执行器进行动作测试,即手动发送控制信号,观察执行器的响应情况。
执行器应该根据控制信号快速、准确地调整到设定的位置。
9.自动控制测试:使用控制器的自动控制功能,通过发送控制信号模拟实际应用场景,观察执行器的响应情况。
确保执行器能够按照设定的开度值进行精确控制,并满足系统的要求。
10.故障诊断:在调试过程中,如果发现执行器无法正常工作或者存在问题,使用故障诊断功能进行故障排查。
根据上位机软件或者操作界面显示的故障信息,进行相应的处理和修复。
11.记录和报告:在执行器调试完成后,将所有的调试参数、测试结果以及故障排查记录保存并制作调试报告。
1. 第一步初始界面,调试时需要把切换开关打到现场就地位置,按
初始界面,显示界面如图中所示
Limits 主要进行阀门开关方式,开关限位,以及扭矩的设定Indication 主要设定LED显示和开关触点
Control 就地跟远程控制一些参数设定
ESD ESD参数设定
Security 密码设定
Defaults 恢复出厂设定
2.阀位设定,选择图中Limits,按进入关限位调试界面,Direction 开关方向,默认Clock
Actiom 开关方式Limit 限位Torque 力矩
Torque 开关阀力矩值的设定
Set Limit 设定开关限位
进入该界面后,按选择菜单,
Direction 默认Clock,按下“”键以选择“Close Settings”(关设定)中“Direction”方向)功能。
用或进行选择。
按下键进行确认。
Action 选项选择Limit按下“”键以选择界面,用或进行选择,按下键进行确认。
Torque 力矩值选择60%左右,这个跟阀门实际需要的扭矩为准,按下“”键以选择界面,用或进行增减,按下键进行确认。
Set Limit首先将电动头涡轮箱出的2个限位螺栓松出,按下遥控器“”键以选择界面,
首先设定阀门关限位将执行器和阀门动作至全关位置后(可以手轮顺时针转动,手轮上有指示),手轮在往开方向回半圈到一圈,然后电动头涡轮箱上面的螺栓(靠近电动头)往里面拧,直到顶住后往外退出1-2圈,锁紧螺母,按下键进行确认关阀限位。
设定阀门开限位:将执行器和阀门动作至全开位置后(可以手轮逆时针转动,手轮上有指示),手轮在往关方向回半圈到一圈,然后电动头涡轮箱下面的螺栓(底部的)往里面拧,直到顶住后往外退出1-2圈,锁紧螺母,按下键进行确认开阀限位。
3.Indication 主
要设定LED显示和开关触点
开关触点按下“”键以选择界面,用或进行增减,按下键进行确认。
LED 显示
4.Control 就地跟远程控制一些参数设定
就地参数设定Maintained 保持远程控制参数设定
5.Security 密码设定
6.Defaults 恢复出厂设定。