4静定结构的位移计算习题解答
- 格式:doc
- 大小:1021.00 KB
- 文档页数:14
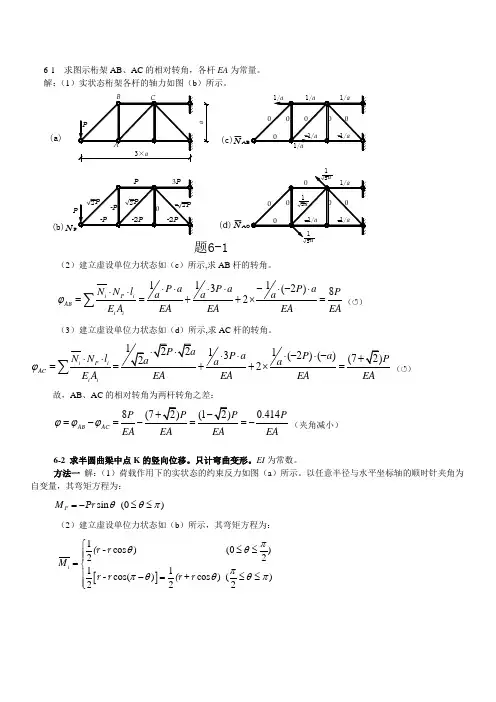
6-1 求图示桁架AB 、AC 的相对转角,各杆EA 为常量。
解:(1)实状态桁架各杆的轴力如图(b )所示。
(b)(a)N(d )(c)题6-1N N(2)建立虚设单位力状态如(c )所示,求AB 杆的转角。
1113(2)82i P iAB i i P a P a P a N N l P a a a E A EA EA EA EAϕ⋅⋅⋅⋅-⋅-⋅⋅⋅==++⨯=∑(↺)(3)建立虚设单位力状态如(d )所示,求AC 杆的转角。
113(2)()(72i P i AC i iP a P a N N lPa a E A EA EA EAϕ⋅⋅⋅-⋅-⋅⋅==+⨯=∑(↺)故,AB 、AC 的相对转角为两杆转角之差:8(7(10.414AB AC P P P PEA EA EA EAϕϕϕ+-=-=-==-(夹角减小)6-2 求半圆曲梁中点K 的竖向位移。
只计弯曲变形。
EI 为常数。
方法一 解:(1)荷载作用下的实状态的约束反力如图(a )所示。
以任意半径与水平坐标轴的顺时针夹角为自变量,其弯矩方程为:sin (0)P M θθπ=-≤≤Pr(2)建立虚设单位力状态如(b )所示,其弯矩方程为:[]1cos )(0)2211cos()cos )()222i M πθθππθθθπ⎧≤≤⎪⎪=⎨⎪-=≤≤⎪⎩(r -r r -r (r +r(a)题6-2(3)积分法求半圆曲梁中点K 的竖向位移。
20233220022311cos )(sin )cos )(sin )2211cos )sin cos )sin sin sin 2)sin sin 2)2222cos 2i V Pk Pr Pr M M ds rd rd EIEI EI Pr Pr d d d d EI EI Pr EI πππππππππθθθθθθθθθθθθθθθθθθθ⋅-⋅-⋅∆==+⎡⎤⎡⎤=-⋅+⋅=-+⋅⎢⎥⎢⎥⎣⎦⎣⎦=-∑⎰⎰⎰⎰⎰⎰⎰(r -r (r +r (-(+(-(+(-11320211cos 2)cos cos 2)442Pr EI πππθθθ⎡⎤⎢⎥+-+=-↑⎢⎥⎣⎦()( 方法二:本题也可以只算纵向对称轴左边,再乘2。
第5章静定结构位移计算的虚力法
5.1 复习笔记
本章重点介绍了虚力法的原理以及如何运用虚力法对不同结构在各种荷载作用下的指定位移进行求解。
遵循“化整为零、积零为整”的思想,对结构的局部位移公式进行了分项讨论,在虚力法的指导下叠加组成了结构的整体变形公式,随后将虚力法升华到了对广义单位荷载的设定以及对广义位移的求解;通过引入图乘法,结构的弯矩变形公式的求解变得更加快捷且精确;最后介绍了温度影响下结构的位移求解并归纳了线性变形体系的四个互等定理。
一、虚力法求刚体体系的位移(见表5-1-1)
表5-1-1 虚力法求刚体体系的位移
图5-1-1
二、虚力法求静定结构的位移(见表5-1-2)
表5-1-2 虚力法求静定结构的位移
表5-1-3 广义位移分类
三、两个对偶解法——虚力法求位移、虚位移法求内力(见表5-1-4)
表5-1-4 两个对偶解法——虚力法求位移、虚位移法求内力
四、荷载作用时静定结构的弹性位移计算(见表5-1-5)
表5-1-5 荷载作用时静定结构的弹性位移计算
五、图乘法(见表5-1-6)
表5-1-6 图乘法
图5-1-2 六、温度改变时静定结构位移计算(见表5-1-7)。
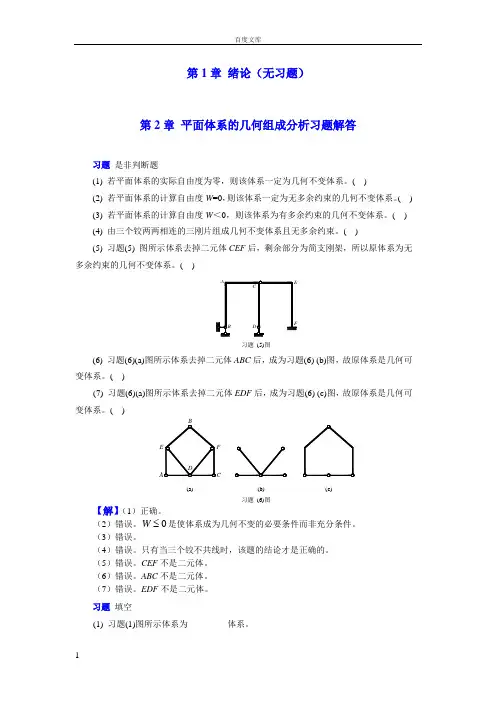
第1章 绪论(无习题)第2章 平面体系的几何组成分析习题解答习题 是非判断题(1) 若平面体系的实际自由度为零,则该体系一定为几何不变体系。
( )(2) 若平面体系的计算自由度W =0,则该体系一定为无多余约束的几何不变体系。
( ) (3) 若平面体系的计算自由度W <0,则该体系为有多余约束的几何不变体系。
( ) (4) 由三个铰两两相连的三刚片组成几何不变体系且无多余约束。
( )(5) 习题(5) 图所示体系去掉二元体CEF 后,剩余部分为简支刚架,所以原体系为无多余约束的几何不变体系。
( )B DACEF习题 (5)图(6) 习题(6)(a)图所示体系去掉二元体ABC 后,成为习题(6) (b)图,故原体系是几何可变体系。
( )(7) 习题(6)(a)图所示体系去掉二元体EDF 后,成为习题(6) (c)图,故原体系是几何可变体系。
( )(a)(b)(c)D习题 (6)图【解】(1)正确。
(2)错误。
0W 是使体系成为几何不变的必要条件而非充分条件。
(3)错误。
(4)错误。
只有当三个铰不共线时,该题的结论才是正确的。
(5)错误。
CEF 不是二元体。
(6)错误。
ABC 不是二元体。
(7)错误。
EDF 不是二元体。
习题 填空(1) 习题(1)图所示体系为_________体系。
习题(1)图(2) 习题(2)图所示体系为__________体系。
习题2-2(2)图(3) 习题(3)图所示4个体系的多余约束数目分别为_______、________、__________、__________。
习题(3)图(4) 习题(4)图所示体系的多余约束个数为___________。
习题(4)图(5) 习题(5)图所示体系的多余约束个数为___________。
习题(5)图(6) 习题(6)图所示体系为_________体系,有_________个多余约束。
习题(6)图(7) 习题(7)图所示体系为_________体系,有_________个多余约束。
第4章静定结构的位移计算计算结构位移的目的结构在荷载作用下会产生内力,同时使其材料产生应变,以致结构发生变形。
由于变形,结构上各点的位置将会发生改变。
杆件结构中杆件的横截面除移动外,还将发生转动。
这些移动和转动称为结构的位移。
此外,结构在其他因素如温度改变、支座位移等的影响下,也都会发生位移。
b5E2RGbCAP例如图4—1a所示简支梁,在荷载作用下梁的形状由直变弯,如图4—1b所示。
这时,横截面的形心移动了一个距离,称为点的线位移。
同时截面还转动了一个角度,成为截面的角位移或转角。
p1EanqFDPw又如图4—2a所示结构,在内侧温度升高的影响下发生如图中虚线所示的变形。
此时,C点移至C点,即C点的线位移为C C。
若将C C沿水平和竖向分解<图4—2b),则分量C C和CC分别称为C点的水平位移和竖向位移。
同样,截面C还转动了一个角度,这就是截面C的角位移。
DXDiTa9E3d在结构设计中,除了要考虑结构的强度外,还要计算结构的位移以验算其刚度。
验算刚度的目的,是保证结构物在使用过程中不致发生过大的位移。
RTCrpUDGiT计算结构位移的另一重要目的,是为超静定结构的计算打下基础。
在计算超静定结构的反力和内力时,除利用静力平衡条件外,还必须考虑结构的位移条件。
这样,位移的计算就成为解算超静定结构时必然会遇到的问题。
5PCzVD7HxA此外,在结构的制作、架设等过程中,常须预先知道结构位移后的位置,以便采取一定的施工措施,因而也须计算其位移。
jLBHrnAILg本章所研究的是线性变形体系位移的计算。
所谓线性变形体系是位移与荷载成比例的结构体系,荷载对这种体系的影响可以叠加,而且当荷载全部撤除时,由何在引起的位移也完全消失。
这样的体系,变形应是微小的,且应力与应变的关系符合胡克定律。
由于变形是微小的,因此在计算结构的反力和内力时,可认为结构的几何形状和尺寸,以及荷载的位置和方向保持不变。
xHAQX74J0X功广义力和广义位移在力学中,功的定义是:一个不变的集中力所作的功等于该力的大小与其作用点沿力作用线方向所发生的分位移的乘积。
第4章 静定结构的位移计算习题解答习题 是非判定题(1) 变形体虚功原理仅适用于弹性体系,不适用于非弹性体系。
( ) (2) 虚功原理中的力状态和位移状态都是虚设的。
( )(3) 功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。
( ) (4) 反力互等定理仅适用于超静定结构,不适用于静定结构。
( ) (5) 关于静定结构,有变形就必然有内力。
( ) (6) 关于静定结构,有位移就必然有变形。
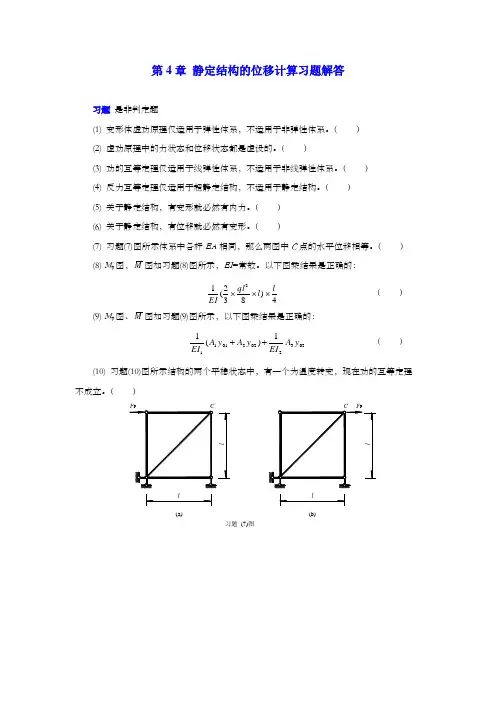
( )(7) 习题(7)图所示体系中各杆EA 相同,那么两图中C 点的水平位移相等。
( ) (8) M P 图,M 图如习题(8)图所示,EI =常数。
以下图乘结果是正确的:4)832(12ll ql EI ⨯⨯⨯ ( )(9) M P 图、M 图如习题(9)图所示,以下图乘结果是正确的:033202201111)(1y A EI y A y A EI ++ ( )(10) 习题(10)图所示结构的两个平稳状态中,有一个为温度转变,现在功的互等定理不成立。
( )(a)(b)习题 (7)图图(b)M图(a)M P 81qM 图(b)P M 图(a)习题 (8)图 习题 (9)图(a)P习题 (10)图【解】(1)错误。
变形体虚功原理适用于弹性和非弹性的所有体系。
(2)错误。
只有一个状态是虚设的。
(3)正确。
(4)错误。
反力互等定理适用于线弹性的静定和超静定结构。
(5)错误。
譬如静定结构在温度转变作用下,有变形但没有内力。
(6)错误。
譬如静定结构在支座移动作用下,有位移但没有变形。
(7)正确。
由桁架的位移计算公式可知。
(8)错误。
由于取0y 的M 图为折线图,应分段图乘。
(9)正确。
(10)正确。
习题 填空题(1) 习题(1)图所示刚架,由于支座B 下沉∆所引发D 点的水平位移∆D H =______。
(2) 虚功原理有两种不同的应用形式,即_______原理和_______原理。
其中,用于求位移的是_______原理。
结构力学——静定结构位移计算在工程和建筑领域中,结构力学作为一门重要的学科,主要研究了结构的受力、变形、破坏机理等问题。
其中,静定结构位移计算是结构力学中的一个重要内容。
静定结构所谓静定结构,是指能够通过静力学方程求解出所有节点的受力、反力和变形的结构。
这种结构是不需要知道材料的物理性质和荷载的实际情况的。
在静定结构中,结构的支座固定方式和荷载情况是已知的,因此能够通过解决一组静力学方程,求解出结构中节点的受力和变形。
静定结构位移计算静定结构位移计算是静定结构的重要计算方法之一。
在结构分析中,位移是一种常见的形变量,它反映了物体在载荷作用下发生的形变情况。
在静定结构中,位移是结构的重要参数之一。
它可以通过求解一组线性方程组得到。
具体来说,就是通过应变—位移—节点力关系,将结构各节点位移用系数矩阵和加载节点力表示出来,再通过求解一个线性方程组,就可以得到各节点的位移值。
静定结构位移计算的步骤静定结构位移计算中的步骤包括:1.列出节点位移方程节点位移与内力之间有一定的关系,可以通过位移方程和内力方程来表示。
这些方程可以根据物理实际条件进行建立。
2.确定支座反力支座反力是从位移计算中得到的结果之一。
支座反力是指结构上所有支点所承受的力,在位移计算时是必须考虑的。
3.形成节点位移方程组形成节点位移方程组时,需要考虑杆件的个数、受力条件、材料特性、支座情况等因素。
4.解出节点位移通过解一个线性方程组,我们可以根据已知的节点力和位移方程,求出每个节点的位移值。
静定结构位移计算的应用静定结构位移计算在现代工程设计中具有广泛的应用。
它能够在保证结构稳定的前提下,可以对结构进行优化设计,提高结构的安全性、稳定性、经济性等方面的性能。
除此之外,静定结构位移计算还可以应用于建筑设计、桥梁设计、机械设计、工业生产等领域中。
它可以提供结构设计的数据支持,为结构工程的实施提供参考。
静定结构位移计算是结构力学中的一个重要方向,其计算方法基于静力学方程进行,其特点是简单、可靠和实用。
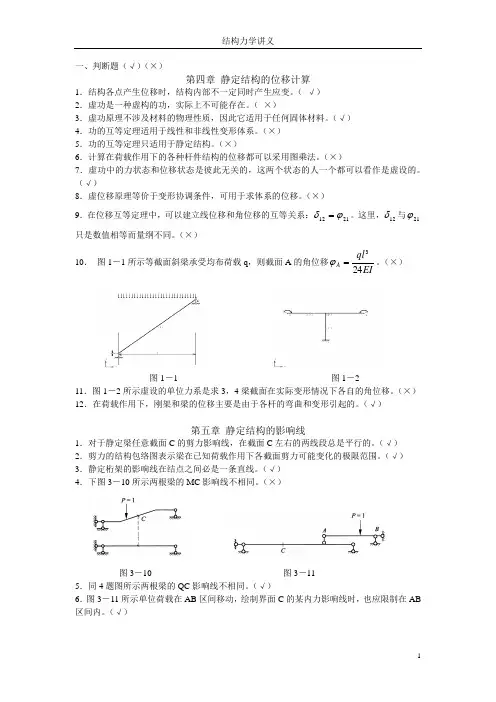
《结构力学习题》(含答案解析)-CAL-FENGHAI.-(YICAI)-Company One120 第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;; B.D.M C.=1=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p 21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
Aa a21 9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q l l l /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a 10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
l l l l /3 2 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m 3m 3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI =常数。
l ll/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/219、求图示结构A、B两截面的相对转角,EI=常数。
静定结构的位移计算——典型例题【例1】计算如图1(a)所示梁结构中跨中C 点的竖向位移,已知EI 为常数。
【解】方法一:(积分法)(1)荷载作用的实际状态以及坐标设置如图6-8(a),其弯矩方程为:(2)虚设单位力状态,以及坐标设置如图6-8(b),其弯矩方程为:(3)积分法求跨中的竖向位移图1方法二:图乘法(1)荷载作用的实际状态,其弯矩图如图1(c)所示; (2)虚设单位力状态,其弯矩图如图1(d)所示; (3)图乘计算跨中竖向位移【例2】计算如图2(a)所示半圆曲梁中点C 的竖向位移,只考虑弯曲变形。
已知圆弧半径为R ,EI 为常数。
CV ∆21102211112222P qlx x l M qlx q x l l x l ⎧⎛⎫≤≤ ⎪⎪⎝⎭⎪=⎨⎛⎫⎛⎫⎪--<≤ ⎪ ⎪⎪⎝⎭⎝⎭⎩1021122x x l M l l x l ⎧⎛⎫≤≤ ⎪⎪⎪⎝⎭=⎨⎛⎫⎪<≤ ⎪⎪⎝⎭⎩24/20/211111113()22222232l l P CVl MM ql ds x qlxdx l qlx q x l dx EI EI EI EI ⎡⎤⎛⎫∆==⨯⨯+⨯⨯--=↓⎢⎥ ⎪⎝⎭⎢⎥⎣⎦⎰⎰⎰4222211112111311121113()222432284223232232cPCV A y MM ds EI EI ql l ql l ql ql l l l ql l EI EI EI ω∆==⎡⎤⎛⎫⎛⎫=⨯⨯⨯⨯+⨯+⨯⨯+⨯⨯⨯=↓ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦∑⎰CV ∆图2【解】(1)实际荷载作用下,以任意半径与x 轴的顺时针夹角θ为自变量(图2a ),弯矩方程为(截面内侧受拉为正):(2)虚设单位荷载状态如图2(b)所示,其弯矩方程为:(3)积分法求跨中的竖向位移【例3】如图3(a)所示梁的EI 为常数,在荷载F 作用下测得结点E 的竖向位移为9mm (向下),求截面B 处的角位移。
第4章 静定结构的位移计算习题解答习题4.1 是非判断题(1) 变形体虚功原理仅适用于弹性体系,不适用于非弹性体系。
( ) (2) 虚功原理中的力状态和位移状态都是虚设的。
( )(3) 功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。
( ) (4) 反力互等定理仅适用于超静定结构,不适用于静定结构。
( ) (5) 对于静定结构,有变形就一定有内力。
( ) (6) 对于静定结构,有位移就一定有变形。
( )(7) 习题4.1(7)图所示体系中各杆EA 相同,则两图中C 点的水平位移相等。
( ) (8) M P 图,M 图如习题4.1(8)图所示,EI =常数。
下列图乘结果是正确的:4)832(12ll ql EI ⨯⨯⨯ ( )(9) M P 图、M 图如习题4.1(9)图所示,下列图乘结果是正确的:033202201111)(1y A EI y A y A EI ++ ( )(10) 习题4.1(10)图所示结构的两个平衡状态中,有一个为温度变化,此时功的互等定理不成立。
( )(a)(b)习题 4.1(7)图图(b)M图(a)M PM (b)P M 图(a)习题 4.1(8)图 习题 4.1(9)图(a)P习题 4.1(10)图【解】(1)错误。
变形体虚功原理适用于弹性和非弹性的所有体系。
(2)错误。
只有一个状态是虚设的。
(3)正确。
(4)错误。
反力互等定理适用于线弹性的静定和超静定结构。
(5)错误。
譬如静定结构在温度变化作用下,有变形但没有内力。
(6)错误。
譬如静定结构在支座移动作用下,有位移但没有变形。
(7)正确。
由桁架的位移计算公式可知。
(8)错误。
由于取0y 的M 图为折线图,应分段图乘。
(9)正确。
(10)正确。
习题4.2 填空题(1) 习题4.2(1)图所示刚架,由于支座B 下沉∆所引起D 点的水平位移∆D H =______。
(2) 虚功原理有两种不同的应用形式,即_______原理和_______原理。
其中,用于求位移的是_______原理。
(3) 用单位荷载法计算位移时,虚拟状态中所加的荷载应是与所求广义位移相应的________。
(4) 图乘法的应用条件是:__________且M P 与M 图中至少有一个为直线图形。
(5) 已知刚架在荷载作用下的M P 图如习题4.2(5)图所示,曲线为二次抛物线,横梁的抗弯刚度为2EI ,竖杆为EI ,则横梁中点K 的竖向位移为________。
(6) 习题4.2(6)图所示拱中拉杆AB 比原设计长度短了1.5cm ,由此引起C 点的竖向位移为________;引起支座A 的水平反力为________。
(7) 习题4.2(7)图所示结构,当C 点有F P =1(↓)作用时,D 点竖向位移等于∆ (↑),当E 点有图示荷载作用时,C 点的竖向位移为________。
(8) 习题4.2(8)图(a )所示连续梁支座B 的反力为)(1611R ↑=B F ,则该连续梁在支座B下沉∆B =1时(如图(b )所示),D 点的竖向位移D δ=________。
习题 4.2(1)图 习题 4.2(5)图M =1习题 4.2(6)图 习题 4.2(7)图(a)(b)习题 4.2(8)图【解】(1)()3∆→。
根据公式R ΔF c =-∑计算。
(2)虚位移、虚力;虚力 。
(3)广义单位力。
(4)EI 为常数的直线杆。
(5)48.875()EI↓。
先在K 点加单位力并绘M 图,然后利用图乘法公式计算。
(6)1.5cm ↑;0。
C 点的竖向位移用公式N ΔF l =∆∑计算;制造误差不会引起静定结构产生反力和内力。
(7)()a∆↑。
由位移互等定理可知,C 点作用单位力时,E 点沿M 方向的位移为21a∆δ=-。
则E 点作用单位力M =1时,C 点产生的位移为12a∆δ=-。
(8)11()16↓。
对(a )、(b )两个图示状态,应用功的互等定理可得结果。
习题4.3 分别用积分法和图乘法求习题4.3图所示各指定位移∆C V 。
EI 为常数。
【解】1)求∆C VP14M P (b ) 图(c )图41M(a )习题4.3(1)图(1) 积分法绘M P 图,如习题4.3(1)(b)图所示。
在C 点加竖向单位力F P =1,并绘M 图如习题4.3(1)(c)图所示。
由于该两个弯矩图对称,可计算一半,再将结果乘以2。
AC 段弯矩为12M x =,P P 12M F x = 则3/2P V P 01112d ()2248l C F l x F x x EI EI∆=⨯⨯⨯=↓⎰(2) 图乘法3P P V1122()2423448C F l F l l lEI EI∆=⨯⨯⨯⨯⨯⨯=↓2)求∆C V(b ) 图(kN·m )P M (c ) 图M习题4.3(2)图(1) 积分法绘M P 图,如习题4.3(2)(b)图所示。
在C 点加竖向单位力并绘M 图,如习题4.3(2)(c)图所示。
以C 点为坐标原点,x 轴向左为正,求得AC 段(0≤x ≤2)弯矩为M x =,2P 10(2)M x =⨯+则22V 0168010(2)d ()3C x x x EI EI∆=⨯⨯+=↓⎰(2) 图乘法由计算位移的图乘法公式,得V 1121126801602240221021()232333C EI EI∆⎡⎤=⨯⨯⨯⨯+⨯⨯⨯⨯-⨯⨯⨯=↓⎢⎥⎣⎦ 3)求∆C V(a )M(c ) 图(b ) 图l 2M P P /2ql =21ql 4习题4.3(3)图(1) 积分法绘M P 图,如习题4.3(3)(b)图所示。
在C 点加竖向单位力并绘M 图,如习题4.3(3)(c)图所示。
根据图中的坐标系,两杆的弯矩(按下侧受拉求)分别为 AB 杆12M x =-,2P 142ql M x qx =-CB 杆M x =,P 2qlM x =则4/22V001111d d ()242224ll C ql ql ql x x qx x x x x EIEI EI∆⎛⎫=-⨯-+⨯=↓ ⎪⎝⎭⎰⎰(2)图乘法2224V1122112()243238222423224C ql l ql l ql l l ql l l EI EI∆⎛⎫=⨯⨯⨯⨯-⨯⨯⨯⨯+⨯⨯⨯⨯=↓ ⎪⎝⎭ 4)求ϕAAEI B ll2EI 2(a )(b ) 图M P (c ) 图Mql 2/8ql 2/22ql 1/311习题4.3(4)图(1)积分法绘M P 图,如习题4.3(4)(b)图所示。
在A 点加单位力偶并绘M 图,如习题4.3(4)(c)图所示。
以A 为坐标原点,x 轴向右为正,弯矩表达式(以下侧受拉为正)为113M x l =-,2P 3122M qlx qx =- 则23P PV 02232202d d 2113111311d 1d 2322322ll C l l l l MM MM x xEI EI x qlx qx x x qlx qx xEI l EI l∆=+⎛⎫⎛⎫⎛⎫⎛⎫=-⨯-+-⨯- ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭⎰⎰⎰⎰358ql EI=( ) (2) 图乘法由计算位移的图乘法公式,得2222112112111212122333323211212111 2333832A ql l l ql EIql l l ql EI ϕ⎡⎤⎛⎫⎛⎫=⨯⨯⨯⨯+⨯+⨯⨯⨯+⨯ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦⎡⎤+⨯⨯⨯⨯+⨯⨯⨯⨯⎢⎥⎣⎦358ql EI=( ) 习题4.4 分别用积分法和图乘法求习题4.4(a)图所示刚架C 点的水平位移∆C H 。
已知EI =常数。
习题4.4图【解】1)积分法Dql lBAClABlDCABDC22ql 2ql 281ql 2(b)图M P M 图(c)(a)xx1lP M 、M 图分别如习题 4.4(b )、(c )图所示,建立坐标系如(c )图所示。
各杆的弯矩用x 表示,分别为 CD 杆M x =,P 12M qlx =AB 杆M x =,2P 12M qlx qx =-代入公式计算,得2H 001111d ()d 22ll C x qlx x x qlx qx x EI EI ∆=⨯⨯+⨯⨯-⎰⎰43()8ql EI =→ 2)图乘法224H112232()2233828C ql ql l l l l ql EI EI∆⎛⎫=⨯⨯⨯⨯+⨯⨯⨯=→ ⎪⎝⎭ 习题4.5 习题4.5(a)图所示桁架各杆截面均为A =2×10-3m 2,E =2.1×108kN/m 2,F P =30kN ,d =2m 。
试求C 点的竖向位移V C ∆。
(b) 图NP F A DC10.51--/2√22/2√000N F (c ) 图d1d (d ) 图F N 1d2√P2F P F F P E2CF PBDE PF PF 2√PF 2-2PF2√-3(a)(b) 图NP F1N F (c ) 图d1d 2√1-d 2√1d2√1-d2√(d ) 图F N 1d 2√√P习题 4.5图【解】绘NP F 图,如习题4.5(b)图所示。
在C 点加竖向单位力,并绘N F 图,如习题4.5(c )图所示。
由桁架的位移计算公式N NPF F Δl EA =∑,求得V P 10 2.64mm()C F d EA∆+==↓ 习题4.6 分别用图乘法计算习题4.3和习题4.4中各位移。
(见以上各题) 习题4.7 用图乘法求习题4.7(1)、(2)、(3)、(4)图所示各结构的指定位移。
EI 为常数。
【解】1)求V C ∆q=4mEIl 3mABEIl =4mCql 12q3416q741(a )P M (b ) 图M(c ) 图习题 4.7(1)图绘P M 图,如习题4.7(1)(b)图所示;在C 点加竖向单位力,并绘M 图,如习题4.7(1)(c )图所示。
由计算位移的图乘法公式,得V 22112111234574165742332331112113 442233242354 ()3C AB BCq q EIql l ql l EI q EI ∆⎡⎤⎛⎫⎛⎫=⨯⨯⨯⨯+⨯+⨯⨯⨯⨯+⨯ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦⎡⎤+⨯⨯⨯⨯+⨯⨯⨯⨯⎢⎥⎣⎦=↓2)求ϕDD2EI Al /2l qEIEI2C B2ql /2l 1111/8ql 22/8/82ql 2/81317(a )(b ) 图M P (c ) 图M习题 4.7(2)图绘P M 和M 图,分别如习题4.7(2)(b )、(c )图所示。
由计算位移的图乘法公式,得2222111317111111122888382D l ql ql ql l ql EI EI ϕ⎛⎫⎡⎤=⨯+⨯+⨯⨯+⨯⨯⨯ ⎪⎢⎥⎝⎭⎣⎦ 31312ql EI=( )3)求A 、B 两截面的相对转角ϕABql EICl BA2EIq2lC/82ql 22ql 11(a )(b ) 图M P (c ) 图M习题 4.7(3)图绘P M 和M 图,分别如习题4.7(3)(b )、(c )图所示。