自动控制原理61串联校正
- 格式:ppt
- 大小:618.50 KB
- 文档页数:17


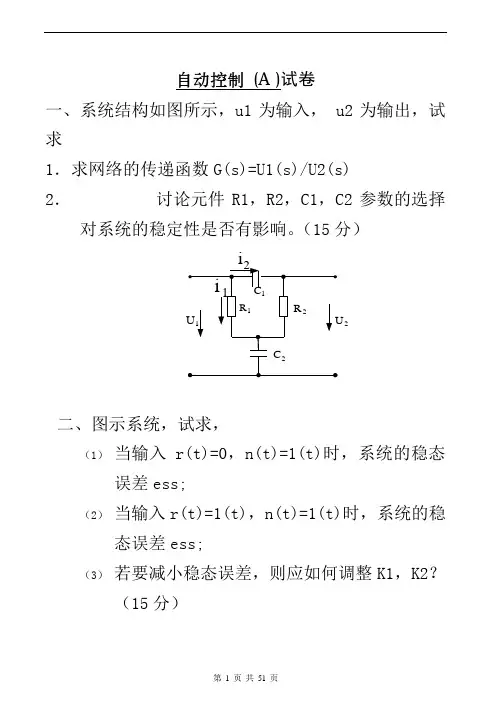
自动控制 (A )试卷一、系统结构如图所示,u1为输入, u2为输出,试求1.求网络的传递函数G(s)=U1(s)/U2(s)讨论元件R1,R2,C1,C2参数的选择对系统的稳定性是否有影响。
(15分)2二、图示系统,试求, 2. 当输入r(t)=0,n(t)=1(t)时,系统的稳态误差ess; 3. 当输入r(t)=1(t),n(t)=1(t)时,系统的稳态误差ess; 4.若要减小稳态误差,则应如何调整K1,K2?(15分)三.已知单位负反馈系统的开环传递函数为.) ())(()(1Tss 1s12sKsG2+++=试确定当闭环系统稳定时,T,K应满足的条件。
(15分)四、已知系统的结构图如图所示,5.画出当∞→:K变化时,系统的根轨迹图;6.用根轨迹法确定,使系统具有阻尼比50.=ζ时,K 的取值及闭环极点(共轭复根)。
(15分)五、已知最小相位系统的对数幅频特性渐近特性曲线,1.试求系统的开环传递函数G (s );2.求出系统的相角裕量γ;3.判断闭环系统的稳定性。
(15分) 六、设单位反馈系统的开环传递函数如下,2s 158s -+=)()(s H s G 7. 试画出系统的乃奎斯特曲线;8.用乃氏判据判断系统的稳定性(15分) 七、已知单位反馈系统的开环传递函数为1)s(2s 4G +=)(s使设计一串联滞后校正装置,使系统的相角裕量040≥γ,幅值裕量10db K g≥,并保持原有的开环增益值。
(10分)自动控制理论B9. 试求图示系统的输出z 变换C(z).(20分)(b)(a)二.闭环离散系统如图所示,其中采样周期T =1s ,(20分)a) 试求系统的开环脉冲传递函数G(z); b) 求系统的闭环脉冲传递函数)z (Φ; c) 确定闭环系统稳定时K 的取值范围。
(注:()T22e z z )s 1(Z ,1z Tz )s 1(Z ,1z z )s1(Z αα--=+-=-=)三. 设单位反馈线性离散系统如图所示,其中T=1秒,试求取在等速度输入信号r(t)=1作用下,能使给定系统成为最少拍系统的数字控制器的脉冲传递函数D(z)。
自动控制原理课程设计报告一、设计目的(1)掌握控制系统设计与校正的步骤和方法。
(2)掌握对控制系统相角裕度、稳态误差、剪切频率、相角穿越频率以及增益裕度的求取方法。
(3)掌握利用Matlab对控制系统分析的技能。
熟悉MATLAB这一解决具体工程问题的标准软件,能熟练地应用MATLAB软件解决控制理论中的复杂和工程实际问题,并给以后的模糊控制理论、最优控制理论和多变量控制理论等奠定基础。
(4)提高控制系统设计和分析能力。
(5)所谓校正就是在系统不可变部分的基础上,加入适当的校正元部件,使系统满足给定的性能指标。
校正方案主要有串联校正、并联校正、反馈校正和前馈校正。
确定校正装置的结构和参数的方法主要有两类,分析法和综合法。
分析法是针对被校正系统的性能和给定的性能指标,首先选择合适的校正环节的结构,然后用校正方法确定校正环节的参数。
在用分析法进行串联校正时,校正环节的结构通常采用超前校正、滞后校正和滞后-超前校正这三种类型。
超前校正通常可以改善控制系统的快速性和超调量,但增加了带宽,而滞后校正可以改善超调量及相对稳定度,但往往会因带宽减小而使快速性下降。
滞后-超前校正兼用两者优点,并在结构设计时设法限制它们的缺点。
二、设计要求(姬松)1.前期基础知识,主要包括MATLAB系统要素,MATLAB语言的变量与语句,MATLAB的矩阵和矩阵元素,数值输入与输出格式,MATLAB系统工作空间信息,以及MATLAB的在线帮助功能等。
2.控制系统模型,主要包括模型建立、模型变换、模型简化,Laplace变换等等。
3.控制系统的时域分析,主要包括系统的各种响应、性能指标的获取、零极点对系统性能的影响、高阶系统的近似研究,控制系统的稳定性分析,控制系统的稳态误差的求取。
4.控制系统的根轨迹分析,主要包括多回路系统的根轨迹、零度根轨迹、纯迟延系统根轨迹和控制系统的根轨迹分析。
5.控制系统的频域分析,主要包括系统Bode 图、Nyquist 图、稳定性判据和系统的频域响应。
武汉工程大学实验报告专业 电气自动化 班号 指导教师 姓名 同组者 无实验名称 线性系统串联校正实验日期 第 五 次实验 一、 实验目的1.熟练掌握用MATLAB 语句绘制频域曲线。
2.掌握控制系统频域范围内的分析校正方法。
3.掌握用频率特性法进行串联校正设计的思路和步骤。
二、 实验内容1.某单位负反馈控制系统的开环传递函数为)1()(+=s s Ks G ,试设计一超前校正装置,使校正后系统的静态速度误差系数120-=s K v ,相位裕量050=γ,增益裕量dB K g 10lg 20=。
解:取20=K ,求原系统的相角裕度。
num0=20; den0=[1,1,0]; w=0.1:1000;[gm1,pm1,wcg1,wcp1]=margin(num0,den0); [mag1,phase1]=bode(num0,den0,w);[gm1,pm1,wcg1,wcp1] margin(num0,den0) grid; ans =Inf 12.7580 Inf 4.4165 由结果可知,原系统相角裕度7580.12=r ,srad c /4165.4=ω,不满足指标要求,系统的Bode 图如图5-1所示。
考虑采用串联超前校正装置,以增加系统的相角裕度。
1010101010幅值(d b )--Go,-Gc,GoGcM a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = 12.8 deg (at 4.42 rad/sec)Frequency (rad/sec)图5-1 原系统的Bode 图由),3,8.12,50(00000c m c Φ=Φ=+-=Φ令取为原系统的相角裕度εγγεγγ,mm ϕϕαsin 1sin 1-+=可知:e=3; r=50; r0=pm1;phic=(r-r0+e)*pi/180;alpha=(1+sin(phic))/(1-sin(phic)) 得:alpha = 4.6500[il,ii]=min(abs(mag1-1/sqrt(alpha)));wc=w( ii); T=1/(wc*sqrt(alpha)); num0=20; den0=[1,1,0]; numc=[alpha*T,1]; denc=[T,1];[num,den]=series(num0,den0,numc,denc); [gm,pm,wcg,wcp]=margin(num,den); printsys(numc,denc) disp('校正之后的系统开环传递函数为:');printsys(num,den) [mag2,phase2]=bode(numc,denc,w); [mag,phase]=bode(num,den,w); subplot(2,1,1);semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*log10(mag2),'-.'); grid; ylabel('幅值(db)'); title('--Go,-Gc,GoGc'); subplot(2,1,2); semilogx(w,phase,w,phase1,'--',w,phase2,'-',w,(w-180-w),':'); grid; ylabel('相位(0)'); xlabel('频率(rad/sec)');title(['校正前:幅值裕量=',num2str(20*log10(gm1)),'db','相位裕量=',num2str(pm1),'0';'校正后:幅值裕量=',num2str(20*log10(gm)),'db','相位裕量=',num2str(pm),'0'])1010101010-100-5050幅值(d b )--Go,-Gc,GoGc1010101010-200-150-100-50050相位(0)频率(rad/sec)图5-2 系统校正前后的传递函数及Bode 图 num/den = 0.35351 s + 1-------------- 0.076023 s + 1校正之后的系统开环传递函数为:num/den = 7.0701 s + 20 -----------------------------0.076023 s^3 + 1.076 s^2 + s 系统的SIMULINK 仿真:校正前SIMULINK 仿真模型:单位阶跃响应波形:校正后SIMULINK仿真模型:单位阶跃响应波形:分析:由以上阶跃响应波形可知,校正后,系统的超调量减小,调节时间变短,稳定性增强。