并有强烈的振荡。难以兼顾稳态和暂态两方面的要求。
② 采用PD控制时
(s)
C(s) R(s)
s2
K
2
Pn
(1
s)
(2n
K
2
Dn
)s
K
2
Pn
特征方程:1 KD s2
n2s
2n
s
K
2
Pn
0
等价开环传函:G1(s)
s2
n2s 2ns
K
2
Pn
为满足稳态误差要求,KP 取得足够大,若 KP 2 则有:
PD控制器中的微分控制规律,能反映输入信号的变 化趋势(D控制实质上是一种“预见”型控制),产生有效 的早期修正信号,以增加系统的阻尼程度,能有效地抑制 过大的超调和强烈的振荡,从而改善系统的稳定性。在串
联校正时,可使系统增加一个 KP KD 的开环零点,使 ,
有助于动态性能的改善。
注意:
D控制作用只对动态过程起作用,而对稳态过程没有 影响,且对系统噪声非常敏感,所以一般不宜单独使用。
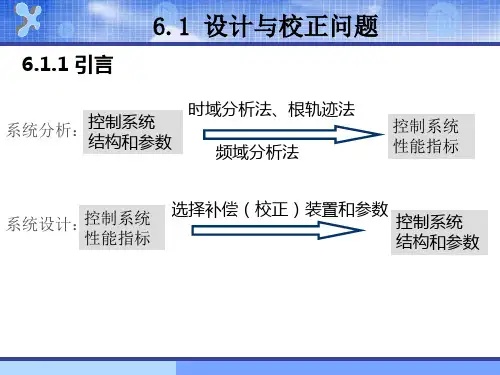
一、性能指标
为某种特殊用途而设计的控制系统都必须满足一定的 性能指标。不同的控制系统对性能指标的要求应有不同的 侧重。如调速系统对平稳性和稳态精度要求较高,而随动 系统则侧重于快速性要求。性能指标的提出,应符合实际 系统的需要和可能。
在控制系统的设计中,采用的设计方法一般依据性能指
标的形式而定,若性能指标以 ts、 %、 、稳态误差等
s1,2 n jn KP 2
dK D ds
0
s
n
KP
2( KD
KP ) n
可见,K D (微分作用增强),根轨迹左移。尽管为满足 稳态要求,KP 选得很大,但总可以选择合适的 KD 值,使系