线性时变系统状态方程的解
- 格式:ppt
- 大小:196.00 KB
- 文档页数:5
Matlab程序解现代控制理论与工程中的状态方程用矩阵指数法解状态方程的matlab函数vslove1:函数vslove1:求解线性定常连续系统状态方程的解function[phit,phitbu]=vsolves1(a,b,ut)%vsolves1谋线性已连续系统状态方程x’=ax+bu的求解%[phit,phitbu]=vsolves1(a,b,ut)%a,b系数矩阵%ut控制输入,必须为时域信号的符号表达式,符号变量为t%phit――输出phi(t)%phitbu――输入phi(t-tao)*b*u(tao)在区间(0,t)的分数symsttao%定义符号变量t,taophit=expm(a*t);%求矩阵指数exp(at)if(b==0)b=zeros(size(a,l),l);%重构系数矩阵bendphi=sub(phit,’t’,’t-tao’);%求exp[a(t-tao)]phitbu=int(phi*b*ut,’tao’,’0’,’t’);%谋exp[a(t-tao)]*b*u(tao)在0~t区间的分数用拉氏变换法解状态方程的matlab函数vslove2:函数vslove2:解线性定常已连续系统状态方程的求解function[sl_a,sl_abu]=vsolves1(a,b,us)%vsolves2求线性连续系统状态方程x’=ax+bu的解%[sl_a,sl_abu]=vsolves1(a,b,ut)%a,b系数矩阵%us掌控输出,必须为拉氏转换后的符号表达式,符号变量为s%sl_a――输入矩阵(sl-a)^(-1)拉式反华转换的结果%sl_abu――输出(sl-a)^(-1)*b*u(s)拉式反变换后的结果symss%定义符号变量t,taoaa=s*eye(size(a))-a;%谋si-ainvaa=inv(aa);%求(si-a)矩阵的逆intaataa=ilaplace(intaa);%求intaa的拉氏反变换si_a=simplify;%简化拉式反变换的结果if(b==0)b=zeros(size(a,l),l);%重构系数矩阵bendtab=ilaplace(intaa*b*us);%求intaa*b*us的拉氏反变换si_abu=simplify(tab);%化简拉式反变换的结果解时变系统状态方程的matlab函数tslove:函数tslove:求解线性时变连续系统状态方程的解function[phi,phibu]=tsolves(a,b,u,x,a,n)%tsolves求时变系统状态方程%[phi,phibu]=vsolves1(a,b,u,x,a,n)%a,b时变系数矩阵%phi――状态迁移矩阵计算结果%phibu――THF1求解分量%u――控制输入向量,时域形式%x――符号变量,阐明矩阵a中的时变参数,通常为时间t%a――积分下限%n――时变状态转移矩阵中计算重积分的最大项数,n=0时无重积分项%n=1时包含二重积分项,.....phi=transmtx(a,x,a,n);%排序状态迁移矩阵phitao=subs(phi,x,’tao’);%谋phi(tao)if(b==0)btao=zeros(size(a,l),l);%谋b(tao)endutao=subs(u,x,’tao’);%求u(tao)phibu=simple(int(phitao*btao*utao,’tao’,a,x));%排序THF1分量求解时变系统转移矩阵的matlab函数transmtx:函数transmtx:解线性时变系统状态迁移矩阵functionphi=transmtx(a,x,a,n)%transmtx计算时变系统状态转移矩阵%phi=transmtx(a,x,a,n)%phi――状态迁移矩阵计算结果%a时变系数矩阵%x――符号变量,指明矩阵a中的时变参数,通常为时间t%a――积分下限%n――时变状态迁移矩阵中排序轻分数的最小项数,n=0时并无轻分数项%n=1时涵盖二重积分项,.....phi=eye(size(a));%初始化phi=iforlop=0:naa=a;fori=1:lopif(aa==0)break;endatemp=subs(aa,x,’taoi’);aa=simplify(a*int(atemp,’tao’,a,x));endif(aa==0)break;endatemp=subs(aa,x,’taoi’);aa=simplify(a*int(atemp,’tao’,a,x));%计算重积分phi=simplify(phi+aa);%修正phiend解线性定常离散系统状态方程的matlab函数disolve:函数disolve:求解线性定常离散系统状态方程的解function[ak,akbu]=disolve(a,b,uz)%disolve谋线性离散系统状态方程x(k+1)=ax(k)+bu(k)的求解%[ak,akbu]=disolve(a,b,uz)%a,b系数矩阵%uz控制输入,必须为z变换后的符号表达式,符号变量为z%ak――输出矩阵[((zi-a)^(-1)z]z反变换后的结果%akbu――输入矩阵[((zi-a)^(-1)*b*u(z)]z反华转换后的结果symsz%定义符号变量zaa=z*eye(size(a))-a;%求zi-ainvaa=inv(aa);%谋(zi-a)矩阵的逆intaataa=iztrans(intaa*z);%谋intaa*z的z 反华转换ak=simple(taa);%精简z反华转换的结果if(b==0)b=zeros(size(a,l),l);%重构系数矩阵bendtab=iztrans(intaa*b*uz);%谋intaa*b*uz的z反华转换akbu=simple(tab);%化简z 反华转换的结果求解线性时变离散系统状态方程的matlab函数tdsolve:函数tdsolve:解线性时变离散系统状态方程的求解functionxk=tsolve(ak,bk,uk,x0,kstart,kend)%tdsolve求线性时变离散系统状态方程x(k+1)=a(k)x(k)+b(k)u(k)的解%xk=tsolve(ak,bk,uk,x0,kstart,kend)%ak,bk系数矩阵%uk掌控输出,必须为时域符号表达式,符号变量为k%x0初始状态%kstart――起始时刻%kend――中止时刻%xk――输出结果,矩阵每一列分别对应x(k0+1),x(k0+2)....symsk%定义符号变量kif(bk==0)bk=zeros(size(a,l),l);%重构系数矩阵bendxk=[];forkk=kstart+1:kendaa=eye(size(k));fori=kstart:kk-1%排序a(k-1)a(k-2)....a(k0+1)a(k0)a=subs(ak,’k’,i);aa=a*aa;endaab=eye(size(ak));bb=zeros(size(bk));fori=kk-1:-1:kk+1%排序a(k-1)a(k-2)....a(j+1)b(j)u(j)的递增和a=subs(ak,’k’,i);aab=aab*a;b=subs(bk,’k’,kk-1+i+kstart);u=subs(uk,’k’,kk-1+i+kstart);bb=bb+aab*b*u;endb=subs(bk,’k’,kk-1);u=subs(uk,’k’,kk-1);bb=bb+b*u;xk=[xkaa*x0+bb];%计算x(k)end已连续系统状态方程线性化后的matlab符号函数sc2d:函数sc2d:线性连续系统状态方程的离散化function[ak,bk]=sc2d(a,b)%sc2d线性化线性已连续系统状态方程x’=ax+bu%sysd=sc2d(a,b)%a,b――连续系统的系数矩阵%ak,bk――离散系统系数符号矩阵%线性状态方程为:x(k+1)=ak*x(k)+bk*u(k)%ak,bk中变量t为取样周期symstt%定义符号变量ttphit=expm(a*t);%求矩阵指数exp(at)if(b==0)b=zeros(size(a,l),l);%重构系数矩阵bendphitb=int(phit*b,’t’,0,’t’);%求exp(at)*b在0~t区间的积分ak=simple(subs(phit,’t’,’t’));bk=simple(phitb);线性时变系统线性化后的matlab函数tc2d:函数tc2d:线性时变系统的离散化function[ak,bk]=tc2d(a,b,x,n)%tc2d线性时变系统的离散化%[ak,bk]=tc2d(a,b,x,n)%a,b――已连续系统的系数矩阵%ak――离散化后的系数矩阵a(kt)%bk――离散化后的系数矩阵b(kt)%x――符号变量,阐明矩阵a\\b中的时变参数,通常为时间t%n――时变状态转移矩阵中计算重积分的最大项数,n=0时无重积分项,%n=1时包含二重积分项,.....symsttphit=transmtx(a,x,k*t,n);%计算时变系统的状态转移矩阵ak=simplify(subs(phi,x,(k+1)*t));%计算离散化后的系数矩阵a(kt)phitao=subs(phi,x,’tao’);%谋phi(tao)if(b==0)btao=zeros(size(a,l),l);elsebtao=subs(b,x,’tao’);%谋b(tao)endphitb=simple(int(phitao*btao,’tao,k*t,x’));%计算受控分量bk=simplify(subs(phib,x,(k+1)*t));%排序线性化后的系数矩阵b(kt)定常系统可控规范i型变换函数ccanonl:函数ccanonl:谋线性定常系统的受控规范i型形式function[abar,bbar,cbar,t]=ccanonl(a,b,c)ìanonl求系统x’=ax+bu,y=cx的可控规范i型系数矩阵?ar,bbar,cbar,――变换后的可控规范i型系数矩阵%t――相似变换矩阵n=length(a);co=ctrb(a,b);if(rank(co)~=n),%判断系统可控性error(‘系统不可控!’);。
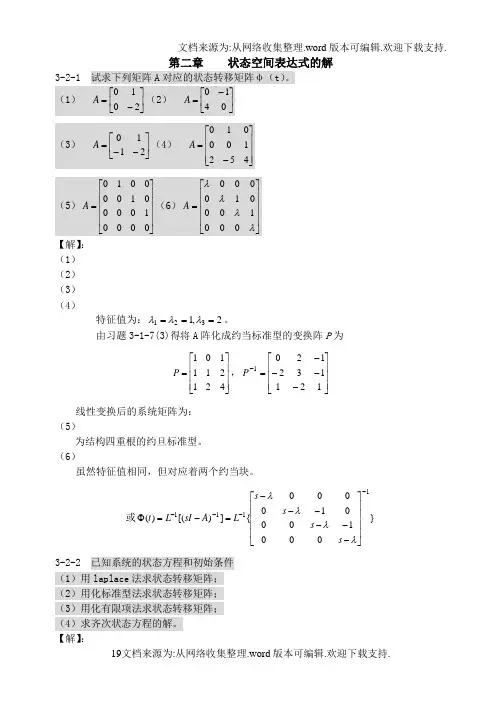
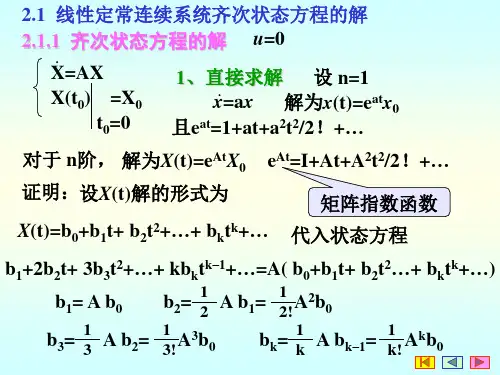
第二章 状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢⎣⎡-=2010A (2) ⎥⎦⎤⎢⎣⎡-=0410A (3) ⎥⎦⎤⎢⎣⎡--=2110A (4) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A (5)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0000100001000010A (6)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=λλλλ000100010000A 【解】:(1) (2) (3) (4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201P线性变换后的系统矩阵为:(5)为结构四重根的约旦标准型。
(6)虽然特征值相同,但对应着两个约当块。
或}0100010000{])[()(1111----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件 (1)用laplace 法求状态转移矩阵; (2)用化标准型法求状态转移矩阵; (3)用化有限项法求状态转移矩阵; (4)求齐次状态方程的解。
【解】:(1) (2)特征方程为: 特征值为:2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:0110000000312111=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:对于当23=λ的特征向量,由0)(33=-P A I λ容易求得: 所以变换阵为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==110010001321P P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-1100100011P 线性变换后的系统矩阵为:(3)特征值为:2,1321===λλλ。
线性系统状态空间分析和运动解状态空间分析方法是一种用来描述线性系统的分析方法。
它将系统的动态特性用一组状态变量来表示,并通过矩阵形式的状态方程进行分析和求解。
状态空间方法是目前广泛应用于自动控制系统设计与分析的一种方法,它可以对系统的稳定性、可控性、可观性以及性能等进行定量分析。
在状态空间分析方法中,首先需要将系统的微分方程表示为矩阵形式的状态方程。
状态方程描述了各个状态变量和它们的变化率之间的关系。
假设系统有n个状态变量x1, x2, ..., xn和m个输入变量u1, u2, ..., um,状态方程可以表示为:dx/dt = Ax + Bu其中,dx/dt是状态变量的变化率,A是状态矩阵,描述状态变量之间的耦合关系,B是输入矩阵,描述输入变量对状态变量的影响。
状态空间分析方法的基本思想是将系统转化为状态空间表达式,然后通过对状态方程进行分析和求解来得到系统的特性和响应。
常见的分析方法包括对系统的稳定性、可控性和可观性进行评估。
稳定性是系统的基本性质之一,用来描述系统在受到扰动时是否能够恢复到平衡状态。
在状态空间方法中,通过研究系统的特征根(或特征值)可以判断系统的稳定性。
特征根是状态方程的解的根,系统的稳定性与特征根的实部有关。
如果特征根的实部都小于零,则系统是稳定的;如果特征根存在实部大于零的情况,则系统是不稳定的。
可控性是指系统是否可以通过输入变量来控制系统的状态变量。
在状态空间方法中,通过可控性矩阵来判断系统的可控性。
如果可控性矩阵的秩等于系统的状态变量个数,则系统是可控的;如果可控性矩阵的秩小于系统的状态变量个数,则系统是不可控的。
可观性是指系统的状态变量是否可以通过观测变量来测量得到。
在状态空间方法中,通过可观性矩阵来判断系统的可观性。
如果可观性矩阵的秩等于系统的状态变量个数,则系统是可观的;如果可观性矩阵的秩小于系统的状态变量个数,则系统是不可观的。
除了稳定性、可控性和可观性外,状态空间分析方法还可以用来分析系统的性能指标,如系统的响应时间、稳态误差和系统的最大误差等。

第二章 状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢⎣⎡-=2010A(2) ⎥⎦⎤⎢⎣⎡-=0410A(3)⎥⎦⎤⎢⎣⎡--=2110A (4)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A(5)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=00100001000010A (6)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=λλλλ0100010000A【解】: (1)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++=⎥⎦⎤⎢⎣⎡+-=-=Φ-----)2(10)2(11}201{])[()(11111s s s s L s sL A sI L t⎥⎥⎦⎤⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++-=---ttees s s s L 22105.05.01)2(10)2(5.05.01(2)⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-+=⎥⎦⎤⎢⎣⎡-=-=Φ-----t tt ts s s s s s L s sL A sI L t 2cos 2sin 22sin 5.02cos 444414}41{])[()(222211111(3)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++-+++=⎥⎦⎤⎢⎣⎡+-=-=Φ-----222211111)1()1(1)1(1)1(2}211{])[()(s s s s s s L s s L A sI L t⎥⎥⎦⎤⎢⎢⎣⎡--+=Φ------tttttt teetete e te t )((4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201P线性变换后的系统矩阵为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==-20010011~1AP P A⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=t tt ttA e ete e e2~0000⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡===Φ-121132120000421211101)(21~t t tttA Ate te eePPeet⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--++-----++-----++--=Φt t ttt tt t t t t t t tt tt t ttt t tt t t e te eete ee te e e te e e te e ete e ete e e te e tee t 34838424225342222322)(222222222(5)为结构四重根的约旦标准型。
现代控制理论_哈尔滨工程大学中国大学mooc课后章节答案期末考试题库2023年1.已知线性定常系统如下所示,下面说法错误的是()【图片】参考答案:引入状态反馈后,不改变系统的能观测性。
2.串联组合系统的传递函数矩阵为各串联子系统的传递函数矩阵之和。
参考答案:错误3.在最优控制问题中,如果系统的性能指标是状态变量和控制变量的二次型函数,则称为线性二次型最优控制问题,简称LQ(Linear Quadratic)问题。
参考答案:错误4.用不大的控制能量,使系统输出尽可能保持在零值附近,这类问题称为输出调节器问题。
参考答案:正确5.研究系统控制的一个首要前提是建立系统的数学模型,线性系统的数学模型主要有两种形式,即时间域模型和频率域模型。
参考答案:正确6.现代控制理论以多变量线性系统和非线性系统作为研究对象,以时域法,特别是状态空间方法作为主要的研究方法。
参考答案:正确7.1892年俄国数学家李亚普诺夫发表了论文《运动稳定性的一般问题》,用严格的数学分析方法全面地论述了稳定性问题。
参考答案:正确8.经典控制理论以单变量线性定常系统作为主要的研究对象,以时域法作为研究控制系统动态特性的主要方法。
参考答案:错误9.下述描述中哪些作为现代控制理论形成的标志()参考答案:用于系统的整个描述、分析和设计过程的状态空间方法._最优控制中的Pontriagin极大值原理和Bellman动态规划。
_随机系统理论中的Kalman 滤波技术。
10.内部稳定性表现为系统的零初态响应,即在初始状态恒为零时,系统的状态演变的趋势。
参考答案:错误11.系统矩阵A所有特征值均具有负实部是线性时不变系统渐近稳定的充要条件。
参考答案:正确12.从物理直观性看,能观测性研究系统内部状态“是否可由输入影响的问题”。
参考答案:错误13.由系统结构的规范分解所揭示,传递函数矩阵一般而言只是对系统结构的不完全描述,只能反映系统中的能控能观测部分.参考答案:正确14.下面论述正确的是()参考答案:李亚普诺夫意义下渐近稳定等同于工程意义下稳定。
状态变量分析法的优点:1. 便于观察系统内部某些物理量的变化过程;2. 与系统的复杂程度无关,复杂系统和简单系统的数学模型相似,适于多输入多输出系统;3. 适于研究非线性或时变系统。
因为一阶微分方程或差分方程是研究非线性和时变系统的有效方法。
4. 便于研究系统的稳定性、可控性、可观测性及系统内部参数变化对系统特性的影响;5. 状态方程都是一阶微分方程或差分方程,便于采用数值解法在计算机上实现系统分析。
系数矩阵由系统的参数决定,非时变系统为常数,时变系统为时间的函数。
,A B 四、输出方程(output equation))(,),(),(21t y t y t y r Λ输出方程是由状态变量和激励信号的线性方程,因此对线性系统而言,输出方程是一组线性方程。
例如,假设系统有个输出,r mrm r r n rn r r r mm n n mm n n e d e d e d x c x c x c t y e d e d e d x c x c x c t y e d e d e d x c x c x c t y +++++++=+++++++=+++++++=ΛΛMΛΛΛΛ22112211222212122221212121211112121111)()()(则,A B矩阵形式为:)(10081910120010321'3'2'1t e x x x x x x ⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01000112198⎡⎤⎢⎥∴=⎢⎥⎢⎥---⎣⎦A 依此方法选择的状态变量常称为相变量状态变量,状态方程叫相变量状态方程。
状态方程和输出方程中的系数矩阵与输入输出方程有关。
[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3210410)(x x x t y 001⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦B []1040=C 0=D矩阵形式为:1211012110''13'22'1)()(+--+++=+----====m m n n n nn x b x b x b t y t e x a x a x a x x xx x x x ΛΛM )(1000100010211210''2'1t e x x x a a a a x x x n n n ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-M M ΛM ΛΛM[]001111n n n n n nb b a b b a b b a b --∴=---=C D L 当时,矩阵不再为0。