汽车自动远光灯辅助系统的工作原理
- 格式:docx
- 大小:37.02 KB
- 文档页数:2
汽车照明灯光控制系统设计解析
一、模块直接控制灯光系统
模块直接控制灯光系统是指由控制模块直接控制灯光的工作。
老款的车辆是将相关的继电器做到了模块的内部进行控制,这种与继电器控制式区别不大,所以这里不再叙述。
另外一种是通过模块内部的场效应管直接输出进行控制。
1.功能特点
由模块通过内部的场效应管(FET)进行直接控制具有如下优点:
①监控:可以监测灯泡的工作是否正常;
②功率限制:如果车辆的电压大于设定值,则可对灯泡的亮度进行控制,提高灯泡的寿命;
③防止光强变化:当发动机的转速突然增加,可能会导致系统电压升高,灯泡光强变大;大功率用电设备的工作可能会导致系统电压下降,灯泡光强变小;采用模块控制则可以避免上述的两种现象。
(1)日间行车灯
日间行车灯是指使车辆在白天行驶时更容易被识别的灯具,装在车身前部。
日间行车灯不是照明灯,不是为了使驾驶员能看清路面,而是为了告知其他车辆或行人有一辆车开过来了,属于信号灯的范畴。
如下图所示,一般的日间行车灯,采用了更高亮度的LED灯组,能大幅降低达35%的电力,可增加电瓶的寿命,且LED的最长寿命更是达到80000h-100000h,几乎等同于车辆的使用年限。
日间行车灯
(2)自动大灯控制系统
自动大灯也叫自动感应式大灯,相当于为前大灯安装了感光控制系统,控制模块根据光线传感器来判断光线亮度变化,从而控制大灯的自动点亮或熄灭。
例如从亮的地方突然进入隧道,大灯自动调节灯光亮度,点亮前路。
引言奥迪远光灯辅助系统是奥迪驾驶员辅助系统中新增的亮点。
该系统可提高黑暗中行车的舒适性,因为它可根据当时的交通状况自动接通和关闭远光灯。
这就为夜间行车提供了更好的视野。
调查显示:虽然远光灯在夜间行车时可以为驾驶员提供更好的视野(也就是提高了安全性),但很多驾驶员在夜间行车时并不开远光灯。
被调查的驾驶员认为,他们不想使得对面来车感到眩目,他们对自己行驶的路段非常熟悉,他们可以不使用远光灯(其实也就是驾驶员们不想因对面不停地有车驶来而不停地去打开或关闭远光灯)。
打开近光灯行车时,对物体的识别能力要比打开远光灯行车时要差。
打开远光灯行车一般可以提前识别车物体,从而可以有足够的时间来停车或者避让。
远光灯辅助系统可以在黑暗中行车时最大程度地延长远光灯的接通时间,只有当对面车辆以及周围环境条件要求时才会切换到近光灯。
在远光灯有可能会造成其他道路使用者眩目之前,远光灯就及时地切换到近光灯了。
驾驶员无须频繁地接通以及关闭远光灯,就能体会到视野更佳的好处了。
434_033434_002 434_003远光灯辅助系统的工作原理引言下面的图表示的是远光灯辅助系统在各种不同的交通条件下的工作方式。
这些图并不是按真实比例画出的,它们只是原理示意图,用于向您展示远光灯辅助系统的工作原理的。
切换为近光以及切换为远光的时刻是无法准确给出的,因为这取决于多个因素,比如能见度、道路的走向以及对面来车或者前面车辆大灯的照明亮度。
在下面的图中,远光灯辅助系统的探测范围最大为1000m。
请注意:这个距离是远光灯辅助系统的最大探测范围了,这只有在很理想的条件下才能实现。
在实际的交通环境中,探测范围是低于这个值的。
实际的探测范围也无法给出精确值,因为这在很大程度上要取决于实际的环境条件,比如能见度、道路的走向以及景色特点。
434_004最大 1000 m 远光灯辅助系统的探测范围67对面来车的情况对面来车还在远光灯辅助系统的探测范围之外。
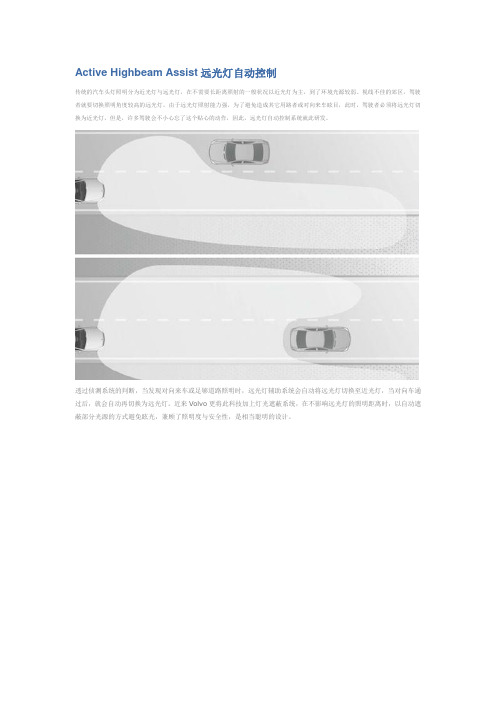
Active Highbeam Assist远光灯自动控制
传统的汽车头灯照明分为近光灯与远光灯,在不需要长距离照射的一般状况以近光灯为主,到了环境光源较弱、视线不佳的郊区,驾驶者就要切换照明角度较高的远光灯。
由于远光灯照射能力强,为了避免造成其它用路者或对向来车眩目,此时,驾驶者必须将远光灯切换为近光灯,但是,许多驾驶会不小心忘了这个贴心的动作,因此,远光灯自动控制系统就此研发。
透过侦测系统的判断,当发现对向来车或足够道路照明时,远光灯辅助系统会自动将远光灯切换至近光灯,当对向车通过后,就会自动再切换为远光灯。
近来Volvo更将此科技加上灯光遮蔽系统,在不影响远光灯的照明距离时,以自动遮蔽部分光源的方式避免眩光,兼顾了照明度与安全性,是相当聪明的设计。

bcm控制大灯原理
BCM是车辆身体控制模块的缩写,它是一种用于控制车辆各种
电气系统的计算机模块。
在汽车中,BCM通常负责控制车辆的照明
系统,包括大灯。
下面我会从多个角度来解释BCM控制大灯的原理。
首先,BCM控制大灯的原理涉及到车辆的电气系统。
当驾驶员
打开车辆的大灯开关时,这个信号会传送到BCM。
BCM接收到这个信
号后,会根据车辆当前的状况和设置来决定是否开启大灯。
例如,
如果是在夜晚或者能见度较低的情况下,BCM会根据预设的逻辑来
控制大灯的开启。
其次,BCM还可能会接收其他传感器的信息,比如光感应器或
者雨量传感器的数据。
这些传感器可以帮助BCM做出更智能的决策,比如根据光线强弱来自动调节大灯的亮度,或者根据雨量来控制雨
刮器和大灯的联动。
此外,BCM还可能会与车辆的其他系统进行通讯,比如车辆的
仪表盘显示系统。
这种通讯可以让BCM向驾驶员显示大灯的状态,
比如是否已经开启或者故障状态等信息。
总的来说,BCM控制大灯的原理是基于接收来自驾驶员操作、传感器数据以及其他系统信息,然后根据预设的逻辑和算法来控制大灯的开启、亮度调节等功能。
这样的设计可以提高驾驶的安全性和舒适性,同时也符合节能环保的理念。

bcm控制大灯原理
BCM即Body Control Module,是车辆的一个重要控制单元,用于管理和控制车辆的各种电子设备。
在车辆中,大灯是非常重要的安全装置之一,而BCM正是通过控制大灯的开关来实现对照明系统的控制。
下面将详细介绍BCM控制大灯的原理。
BCM通过与车辆的其他电子模块进行通信,了解车辆的状态和驾驶者的需求。
当驾驶者需要开启大灯时,BCM会接收到信号并进行处理。
然后,BCM会根据车辆的状态和外部环境的光线情况来决定大灯的工作模式。
在白天或者光线充足的情况下,BCM会将大灯设置为关闭状态,以节省能源。
然而,当外部光线暗下来或者进入隧道等光线不足的地方时,BCM会自动开启大灯,以提供足够的照明效果,确保驾驶者的安全。
BCM还可以根据车辆的速度和转向情况来调整大灯的工作模式。
例如,在高速行驶时,BCM会将大灯设置为远光灯模式,以提供更远的照明距离;而在转弯时,BCM会将大灯设置为转向灯模式,以辅助驾驶者观察路况。
除了自动控制外,驾驶者也可以通过车辆的操作面板或者遥控器来手动控制大灯。
当驾驶者手动操作时,BCM会接收到信号并进行处理,根据驾驶者的指令来控制大灯的开关状态。
BCM通过与车辆的其他电子模块进行通信,根据车辆的状态和外部环境的光线情况来决定大灯的工作模式。
它能够自动调节大灯的亮度和照明模式,提供给驾驶者足够的照明效果,以确保驾驶安全。
通过BCM的控制,大灯能够根据不同的驾驶条件和需求进行灵活的调整,为驾驶者提供更好的驾驶体验。
关于森雅R7汽车大灯自动控制作者:刘羿繁来源:《汽车博览·科研上旬刊》2019年第01期摘要:汽车远光灯是为了让驾驶者在夜间高速行驶时看清远方路况,但是在会车时如果不及时切换到近光,其强烈的光线会使对面车辆无法看清道路,极易发生交通事故。
根据国内交通事故统计,在夜间发生的交通事故中,与远光灯有关的事故占到近四成,并且成上升的趋势。
本文是对森雅R7大灯控制的改良。
当在夜晚行车远光灯打开时,系统能通过光检测输入模块检测前方是否有相对方向的较强光源,若有则激活自动变光模块,切断远光电路并接通近光电路。
能很好地解决传统方式下,手动变光不及时和驾驶员因疏忽忘记切换近光等问题,从而大大减少事故的发生。
关键词:汽车前照灯;晶体三极管;自动变光1 课题研究目的本课题研究的目的是根据目前市场中低端汽车电子辅助系统的发展趋势,开发一套适合现有市场占有率非常大的森雅R7的夜间行车远光灯自动控制系统,选择合适的传感器捕捉远光灯信号,发现前方车辆的高强度远光,及时将自己车的远光换到近光。
辅助驾驶者进行自我约束,确保汽车夜间行车远光灯的按章使用,提高行车安全,减少因车远光灯造成的交通事故。
1.1 课题拟解决的主要问题雅R7是中国一汽最新推出的小型SUV,在延续“森雅”系列多功能车的实用性、耐用性、经济性的同时,在品质、工艺、动力、舒适性及安全性等方面得到很大提升。
整体来说,无论外观还是内饰,无论配置还是价格,都具有市场竞争力,充分满足了SUV汽车消费者的需求。
在汽车行业占有较大的比重。
但是在这个巨大的市场背后有30%左右的各大交通事故都少不了经济实惠的汽车的参与。
所以想通过对森雅R7的大灯变光控制的改进,在原有的大灯电路上进行控制的改进从而大大提高R7的夜间行车安全性,减少夜间因为灯光引起事故的发生,保证了行车的人生和财产安全的同时也顺应了如今汽车智能化的发展趋势。
2 汽车远光灯控制汽车前照灯自动变光器其工作方式是利用光敏传感器探测前方来车的远光灯,当距离对面车辆200m左右时,自动变光器可根据对方车辆灯光变换作相应的变换,如果对方车辆远光超过2S不变换时,本车能自动恢复远光,提醒或迫使对方车辆变光。
远近光灯自动切换照明及测距停车系统远近光灯自动切换照明及测距停车系统(Automatic headlight beam control and parking assist system)是一种现代化的汽车辅助系统,它能够根据道路条件和其他车辆的状况自动调整车辆的照明系统,提高夜间行驶的安全性。
该系统还具备测距停车的功能,帮助驾驶员在倒车或者停车时更加准确地控制车辆位置,避免与障碍物发生碰撞。
远近光灯自动切换照明系统是基于摄像头和传感器技术的智能系统。
车辆通过前方摄像头感知道路上的情况,包括其他车辆、行人和路标等。
根据摄像头的反馈,系统能够自动切换车辆的远近光灯。
当摄像头检测到其他车辆或者行人时,系统会自动将车辆的远光灯切换到近光灯模式,避免对其他交通参与者造成盲区或者干扰。
当没有其他车辆或者行人在附近时,系统会自动切换回远光灯,提供更好的照明效果。
该系统还具备自动调整照明角度的功能。
根据车辆的速度和转向角度,系统可以自动调整车灯的角度,确保照明范围始终位于正确的位置。
当车辆处于直线行驶状态时,车灯会向前方辐射;而当车辆进行转弯时,车灯会自动调整角度,照亮转弯的区域。
测距停车系统是另一个重要的功能。
通过后方摄像头和传感器,系统可以感知到车辆周围的障碍物,如墙壁、树木或者其他车辆。
系统会根据障碍物的距离和位置提供准确的倒车辅助信息,帮助驾驶员更好地控制车辆的位置和方向。
一些高级版的系统还可以通过声音或者视觉提示提醒驾驶员注意障碍物的位置和距离。
远近光灯自动切换照明及测距停车系统是一项非常有用的技术,它可以在夜间行驶时提供更好的照明效果,减少事故的发生。
该系统还能够帮助驾驶员更加准确地控制车辆位置,提高停车的安全性和便利性。
随着技术的不断进步,这种系统将越来越智能化和精确化,为驾驶员提供更好的驾驶体验和安全保障。
ADAS(高级驾驶辅助系统)八大系统介绍ADAS(Advanced Driving Assistant System)即高级驾驶辅助系统。
ADAS 是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。
ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。
早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。
对于最新的ADAS 技术来说,主动式干预也很常见。
汽车高级辅助驾驶系统通常包括:导航与实时交通系统TMC;电子警察系统ISA (Intelligent speed adaptation或intelligent speed advice);车联网(Vehicular communication systems);自适应巡航ACC(Adaptive cruise control);车道偏移报警系统LDWS(Lane departure warning system);车道保持系统(Lane change assistance);碰撞避免或预碰撞系统(Collisionavoidance system或Precrash system);夜视系统(Night Vision);自适应灯光控制(Adaptive light control)行人保护系统(Pedestrian protection system)自动泊车系统(Automatic parking)交通标志识别(Traffic sign recognition)盲点探测(Blind spot detection)驾驶员疲劳探测(Driver drowsiness detection)下坡控制系统(Hill descent control)电动汽车报警(Electric vehicle warning sounds)系统。
汽车led大灯工作原理
汽车LED大灯的工作原理主要涉及以下几个方面:
1. LED原理:LED全称为Light Emitting Diode,即发光二极管。
当电流通过LED芯片时,芯片内的半导体材料会发生电子复合释放能量,产生光线。
2. 光电转换:汽车LED大灯中的LED芯片通过正向电压激活发光,LED芯片内的半导体材料将电能转化为光能,进而发出可见光。
3. 芯片结构:LED芯片由三种基本颜色的发光二极管(红、绿、蓝)构成。
通过不同程度的电流和脉冲宽度调节,可以实现各种颜色的光线发射。
4. 散热设计:汽车LED大灯在工作过程中会产生热量,所以必须设计有效的散热系统,以防止LED芯片过热而损坏。
常见的散热设计包括散热底座、导热胶、散热风扇等。
5. 驱动电路:汽车LED大灯需要专门的驱动电路来控制和调节电流,以确保LED芯片的稳定工作。
驱动电路更能通过调整电流和脉冲宽度等参数来控制LED的亮度和颜色。
总结:汽车LED大灯利用LED芯片的光电转换原理,通过驱动电路控制LED的亮度和颜色,从而实现车辆照明。
同时,合理的散热设计也是确保LED大灯长时间稳定工作的关键因素之一。
汽车自动远光灯辅助系统的工作原理随着科技的不断进步和人们对驾驶安全性的要求提高,汽车自动远光灯辅助系统逐渐走入我们的生活。
该系统通过感知和识别道路上的环境和其他车辆,以实现自动切换远光灯和近光灯的功能,提升夜间行车的安全性和便利性。
本文将介绍汽车自动远光灯辅助系统的工作原理及其相关技术。
一、环境感知技术
汽车自动远光灯辅助系统首先需要通过环境感知技术获取道路上的信息。
这种技术主要通过激光、雷达、摄像头等设备来实现。
摄像头可以采集道路的图像信息,激光和雷达则可以检测道路上的物体和障碍物。
二、图像处理和识别技术
获取到道路图像和相关的环境信息后,系统需要进行图像处理和识别。
这一步骤主要利用计算机视觉技术对道路、天空、车辆等进行分析和识别,以确定可使用远光灯的情况。
三、智能决策算法
在获得道路和环境信息后,系统需要进行智能决策,以确定是否需要切换灯光。
这一步骤涉及到深度学习、人工智能等领域的技术,通过对大量数据进行学习和训练,系统可以准确判断何时应该开启或关闭远光灯。
四、灯光控制系统
在确定了需要切换灯光的情况下,系统需要将决策结果转化为实际的灯光控制。
汽车自动远光灯辅助系统通过与车辆的电路系统连接,实时控制远光灯和近光灯的切换。
除了以上的主要工作原理外,汽车自动远光灯辅助系统还可以配备其他辅助功能,如自适应远光灯控制和转向灯联动控制。
通过自适应远光灯控制,系统可以根据前方车辆和对向来车的情况自动调整光线亮度和斑点,避免对其他驾驶员产生干扰。
而转向灯联动控制可以在转向时自动调整远光灯的角度,提供更好的照明效果。
总结起来,汽车自动远光灯辅助系统的工作原理主要包括环境感知技术、图像处理和识别技术、智能决策算法以及灯光控制系统。
通过这些技术的结合,系统能够根据道路和环境的情况自动切换远光灯和近光灯,提升夜间行车的安全性和便利性。
随着科技的进一步发展,相信汽车自动远光灯辅助系统将会越来越智能化,并为驾驶者带来更好的行车体验。