第八章超静定结构解法
- 格式:ppt
- 大小:1.43 MB
- 文档页数:73
第八章超静定结构解法
超静定结构是指结构中的节点数超过了杆件数,即结构中的自由度超过了平衡条件的数量。
对于超静定结构的解法,需要进行位移计算和支反力计算。
位移计算可以通过以下步骤进行:
1.建立结构的刚度方程。
根据杆件的刚度和支座的自由度约束,可以建立结构的刚度矩阵。
刚度矩阵是一个n×n的矩阵,其中n是结构的自由度数量。
2.确定约束条件。
根据结构的支座约束,可以确定支座位移为零的约束条件。
3.应用边界条件。
将约束条件应用到刚度方程中,可以得到一个未知位移的方程组。
4.解未知位移。
通过解这个方程组,可以得到结构的未知位移值。
支反力计算可以通过以下步骤进行:
1.利用位移计算中得到的未知位移值,计算杆件的应力。
应力可以通过应变和材料的本构关系得到。
2.根据杆件的几何特征和应力,计算杆件的应力。
应力可以根据杆件的截面积和应力得到。
3.根据杆件的几何特征和应力,计算杆件的内力。
内力可以根据截面受力平衡的条件得到。
4.根据内力和支座约束,计算支座的反力。
反力可以通过力的平衡条件得到。
总的来说,超静定结构的解法需要进行位移计算和支反力计算。
在位移计算中,需要建立结构的刚度方程,并将约束条件以及边界条件应用到方程中,来解未知位移。
在支反力计算中,需要利用位移计算中得到的未知位移值,计算杆件的应力和内力,并根据杆件的几何特征和应力来计算支座的反力。
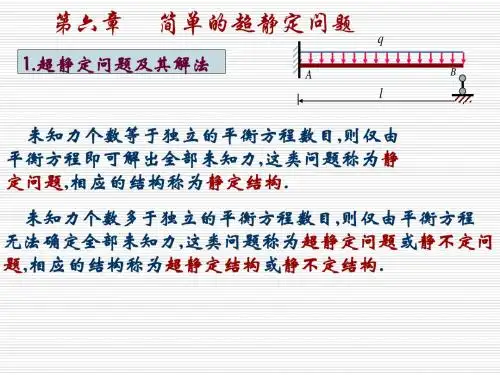
西南交通大学应用力学与工程系材料力学教研室第八章简单的超静定问题§8-1 概述静定结构: 仅靠静力平衡方程就可以求出结构的全部未知的约束反力或内力FAB2A F1BααC平面任意力系:3个平衡方程平面共点力系:2个平衡方程独立平衡方程数:超静定结构(静不定结构): 仅凭静力学平衡方程不能求解全部未知内力或反力的结构。
超静定结构的未知力的数目多于独立的平衡方程的数目;两者的差值称为超静定的次数。
BD C A 132FααF F CF B F A BC ABCADA FααF N1y xF N3F N2BD C A 132FααF F CF B F A BC AA FααF N1y xF N3F N2•习惯上把维持物体平衡并非必需的约束称为多余约束,相应的约束反力称为多余未知力。
•超静定的次数就等于多余约束或多余未知力的数目。
•注意:从提高结构的强度和刚度的角度来说,多余约束往往是必需的,并不是多余的。
超静定的求解:根据静力学平衡条件确定结构的超静定次数,列出独立的平衡方程;然后根据几何、物理关系列出需要的补充方程;则可求解超静定问题。
F F CF B F A BC A•补充方程的数目=多余未知力的数目=多余约束数。
•根据变形几何相容条件,建立变形几何相容方程,结合物理关系(胡克定律),则可列出需要的力的补充方程。
•补充方程的获得,体现了超静定问题的求解技巧与关键。
此处我们将以轴向拉压、扭转、弯曲的超静定问题进行说明。
BD C A 132FααF F CF B F A BC AA FααF N1yxF N3F N2§8.2 拉压超静定问题1拉压超静定问题解法例两端固定的等直杆AB ,在C 处承受轴向力F 如图,杆的拉压刚度为EA ,求杆的支反力.解:一次超静定问题=−+F F F B A F BA F AB ablFC (1) 由节点A 的平衡条件列出杆轴线方向的平衡方程(2)变形:补充方程(变形协调条件)可选取固定端B 为多余约束,予以解除,在该处的施加对应的约束反力F B ,得到一个作用有原荷载和多余未知力的静定结构--称为原超静定结构的基本静定系或相当系统注意原超静定结构的 B 端约束情况,相当系统要保持和原结构相等,则相当系统在B 点的位移为零。


第八章力法本章主要内容1)超静定结构的超静定次数2)力法的解题思路和力法典型方程(显然力法方程中所有的系数和自由项都是指静定基本结构的位移,可以由上一章的求位移方法求出(图乘或积分))3)力法的解题步骤以及用于求解超静定梁刚架桁架组合结构(排架)4)力法的对称性利用问题,对称结构的有关概念四点结论5)超静定结构的位移计算和最后内力图的校核6)§8-1超静定结构概述一、静力解答特征:静定结构:由平衡条件求出支反力及内力;超静定结构的静力特征是具有多余力,仅由静力平衡条件无法求出它的全部(有时部分可求)反力及内力,须借助位移条件(补充方程,解答的唯一性定理)。
二、几何组成特征:(结合例题说明)静定结构:无多余联系的几何不变体超静定结构:去掉其某一个或某几个联系(内或外),仍然可以是一个几何不变体系,如桁架。
即:超静定结构的组成特征是其具有多余联系,多余联系可以是外部的,也可能是内部的,去掉后不改变几何不变性。
多余联系(约束):并不是没有用的,在结构作用或调整结构的内力、位移时需要的,减小弯矩及位移,便于应力分布均匀。
多余求知力:多余联系中产生的力称为三、超静定结构的类型(五种)超静定梁、超静定刚刚架、超静定桁架、超静定拱、超静定组合结构四、超静定结构的解法综合考虑三个方面的条件:1、平衡条件:即结构的整体及任何一部分的受力状态都应满足平衡方程;2、几何条件:也称变形条件、位移条件、协调条件、相容条件等。
即结构的变形必须符合支承约束条件(边界条件)和各部分之间的变形连续条件。
3、物理条件:即变形或位移与内力之间的物理关系。
精确方法:力法(柔度法):以多余未知力为基本未知量位移法(刚度法):以位移为基本未知量。
力法与位移法的联合应用:力法与位移法的混合使用:混合法近似方法:力矩分配法、矩阵位移法、分层总和法、D值法、反弯点法等本章主要讲力法。
五、力法的解题思路(结合例子)把不会算的超静定结构通过会算的基本结构来计算。
第八章 位移法位移法是计算超静定结构的第二种基本方法。
位移法是将结构拆成杆件,以杆件的内力和位移关系作为计算的基础,再把杆件组装成结构,这是通过各杆件在结点处力的平衡和变形的协调来实现的。
位移法方程有两种表现形式,即直接写出平衡方程和建立基本体系的典型方程,二者是等价的。
本章主要讨论位移法的基本原理和采用位移法计算超静定结构。
第一节 基本概念力法和位移法是分析超静定结构的两种基本方法。
力法发展较早,19世纪末已经广泛应用于分析各类超静定结构。
位移法是20世纪20年代为了解算复杂刚架结构而发展起来的。
力法与位移法的主要区别在于基本未知量的不同。
用力法计算超静定结构,是以多余未知力作为基本未知量,将超静定结构转化为静定结构,以位移协调条件为依据建立力法典型方程,求出多余未知力后再利用叠加原理或平衡条件,求出原结构的内力。
力法的出现和发展为超静定结构的受力分析提供了最基本的算法。
在一定的外因作用下,结构的内力和位移间具有一定的关系。
因此,也可把结构的某些位移作为基本未知量,通过平衡条件建立位移法方程,将这些位移求出后,利用位移和内力之间的关系,求出结构的内力,这就是位移法的基本思想。
位移法在求解超静定结构(特别是超静定梁和刚架)时比力法要简单,它也为求解超静定结构的其它解法如矩阵位移法和结构计算软件等奠定了基础。
用位移法分析超静定结构时,作如下基本假定:①以弯矩为主要内力的受弯直杆,忽略轴向变形和剪切变形的影响;②杆件的弯曲变形很小,结点转角和各杆弦转角都很微小。
由假设①可知,杆件变形前的直线长度与变形后的曲线长度相等;由假设②可知,变形后的曲线长度与弦线长度相等。
即:尽管杆件发生弯曲变形,但杆件两端结点之间的距离仍保持不变。
为了说明位移法的基本概念,研究图8-1(a)所示的刚架结构,其在荷载作用下产生虚线所示的变形。
其中,杆件AB 、AC 和AD 在刚结点A 处的转角位移是相等的,即:AB AC AD A θθθθ===支座B 为固定端,没有线位移也没有角位移。