9-简单超静定结构的解法解析
- 格式:ppt
- 大小:2.30 MB
- 文档页数:34
用力法求解超静定结构概述超静定结构是指结构中的支座和约束条件多于结构自由度的情况。
用力法是一种经典的结构分析方法,常用于求解超静定结构。
本文将介绍用力法求解超静定结构的基本原理和步骤,并通过实例加以说明。
一、基本原理用力法的基本原理是根据平衡条件和变形约束,通过假设未知力的大小和方向,建立力的平衡方程和变形方程,解出未知力和结构的变形。
用力法适用于各种类型的结构,包括梁、柱、桁架等。
二、步骤用力法求解超静定结构的步骤如下:1. 选择合适的剖面根据结构的几何形状和约束条件,选择合适的剖面,将结构分割为若干个部分。
2. 假设未知力的方向和大小根据结构的特点和约束条件,假设未知力的方向和大小。
通常,未知力的方向可以根据结构的几何形状和外力的作用方向来确定,而未知力的大小则需要通过力的平衡方程来求解。
3. 建立力的平衡方程根据假设的未知力和结构的几何形状,建立力的平衡方程。
平衡方程包括力的平衡条件和力的矩平衡条件。
4. 建立变形方程根据结构的变形情况和约束条件,建立变形方程。
变形方程可以根据结构的刚度和约束条件来确定。
5. 解方程将力的平衡方程和变形方程联立,解方程组得到未知力和结构的变形。
6. 检验结果将求解得到的未知力和结构的变形代入原平衡方程和变形方程中,检验结果的准确性。
如果结果符合平衡和变形的要求,则求解成功;如果结果不符合要求,则需要重新假设未知力并重新求解。
三、实例分析为了更好地理解用力法求解超静定结构的步骤和原理,下面以一个简单的梁结构为例进行分析。
假设有一根悬臂梁,在梁的自重和外力作用下,需要求解支座反力和梁的变形。
1. 选择合适的剖面选择悬臂梁的剖面,将梁分割为两个部分:悬臂部分和支座部分。
2. 假设未知力的方向和大小假设支座反力的方向向上,大小为R。
3. 建立力的平衡方程根据力的平衡条件,可以得到悬臂部分的平衡方程:R - F = 0,其中F为梁的自重。
4. 建立变形方程根据梁的几何形状和约束条件,可以建立悬臂部分的变形方程,得到悬臂部分的弯矩和挠度。
超静定结构的解法
迭代解法主要利用迭代计算的方法,在每次迭代中修正应力和应变的分布,直到趋于稳定。
该方法的基本步骤如下:
1.假设受力的初始状态,即假设一些节点处的节点位移和内力;
2.利用结构的几何约束和材料力学性质,计算一些节点处的内力和位移;
3.判断内力和位移是否满足力学静平衡条件,若满足则计算结束,否则进入下一步;
4.通过一定的修正方法,调整节点内力和位移;
5.重复步骤2至步骤4,直到内力和位移满足力学静平衡条件。
迭代解法的优点是通用性强,适用于各种超静定结构,但收敛速度较慢,计算量较大。
弹性势能法是利用结构的势能原理,将结构的力学行为转化为弹性势能的变化来求解结构的内力和位移。
该方法的基本步骤如下:
1.根据结构的受力情况和约束条件,建立适当的势能表达式;
2.利用力学静平衡方程,将势能表达式表示为内力和位移的函数;
3.求解势能的极值点,即通过对内力和位移偏导等于零,解得内力和位移的方程;
4.建立适当的边界条件,如位移边界条件和约束条件;
5.通过求解得到的方程,计算结构的内力和位移。
弹性势能法的优点是求解过程相对简单,收敛速度较快,但要求结构能够满足一定的连通性和对称性条件。
在解超静定结构的过程中,还可以采用其他方法来辅助计算,如虚功法、位移法、能量法等。
此外,有些超静定结构也可以通过变形补偿或者加固措施等方法使之退化为静定结构,进而采用常规的静力计算方法来求解。
总之,解超静定结构是一个相对复杂的过程,需要利用附加条件和弹性支承约束来求解。
通过迭代解法和弹性势能法等方法可以得到结构的内力和位移,为实际工程中的设计和分析提供重要的参考和依据。

超静定问题的解题步骤概述说明以及解释1. 引言1.1 概述目前,超静定问题在工程设计和科学研究中扮演着至关重要的角色。
超静定问题是指那些具有多余约束条件的力学系统,在这种情况下,物体的运动过程不止一个可能的解。
解决超静定问题需要使用特定的数学工具和分析方法。
本文将介绍解题步骤,为读者提供一个清晰而简洁的指南。
1.2 文章结构本文分为五个主要部分。
在引言部分,我们将概述文章内容,并简要介绍超静定问题及其重要性。
第二部分将对超静定问题进行详细讨论,包括定义、背景知识以及实际应用场景。
接下来,第三部分将总结解题步骤,并概括每个步骤所需考虑的关键点。
第四部分则会更加详细地解释每个步骤,并提供具体操作步骤和示例。
最后,在结论与总结部分,我们将总结解题步骤,并讨论可能遇到的困难与挑战,以及其他相关问题和研究方向。
1.3 目的本文旨在帮助读者全面了解超静定问题和解题步骤。
通过详细讲解每个步骤的要点和操作方法,读者将能够更加轻松地解决超静定问题,并理解其在实际工程和科学领域的应用。
我们希望本文能成为读者解题过程中的有价值的参考资料,提供清晰而系统化的指导。
2. 超静定问题简介:2.1 定义和背景知识:超静定问题是指在静力学中,物体受到的约束超过了必要的约束数量。
这意味着通过仅使用平衡方程无法求解未知变量的值。
超静定问题在工程、建筑和力学领域中经常出现,并需要特殊的解题方法来找到合适的解决方案。
2.2 超静定问题的重要性:理解和解决超静定问题对于设计和分析结构非常重要。
一些实际应用场景中,超静定结构可以提供更高的刚度、稳定性和可持续性。
因此,研究人员和工程师需要掌握解决超静定问题的技巧。
2.3 实际应用场景:超静定问题广泛应用于建筑、土木工程、桥梁设计以及机械工程等领域。
例如,在建筑设计中,支撑柱或梁受到多个支点约束时可能会出现超静定问题。
在机械工程中,一些连接件或装配件也可能涉及到超静定问题。
了解超静定问题的定义、背景知识以及其在实际应用中的重要性对于理解本文后续将介绍的解题步骤至关重要。
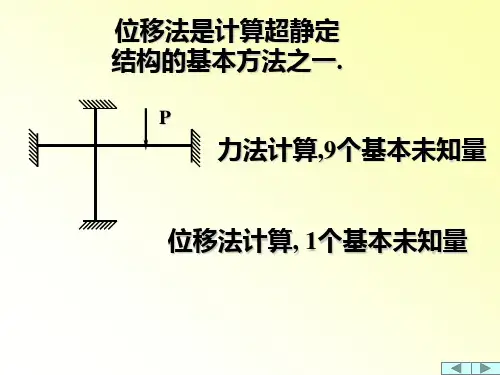
力法、位移法求解超静定结构讲解超静定结构是指在静力学计算中具有过多约束的结构体系,其问题在于不能通过传统的静力学方法直接计算出结构体系的内力以及位移的分布情况,需要利用力法或者位移法来求解超静定结构。
力法是指将结构体系的内力分配给各个构件,然后根据各个构件的受力情况和变形情况,逐步推导出结构体系的内力和位移分布情况的一种方法。
其基本思想是通过外部荷载作用下的内力分配,将超静定结构分解成多个静定结构分析,同时通过协调各个分析时的界面条件,进行内力和位移的匹配,最终得到了超静定结构的内力和位移分布情况。
具体实现步骤如下:1. 选定一个自由图,并对该自由图进行划分,将超静定结构分成多个静定结构,其中每个静定结构的节点数均满足有一个自由度。
分割完毕后,确定每个静定结构的支座反力,然后由每个静定结构自己采用传统的静力学原理分析,并得到各自的内力和位移。
2. 对于静定结构之间的相互配合,需要根据结构体系的受力变形情况建立相互之间的协调关系。
最常用的协调方法是确定静定结构之间的界面条件,如节点位移和节点荷载的相等,以及弹簧刚度之和等于零。
3. 在确定了静定结构之间的界面条件后,就可以获得超静定结构的结构内力分布,接下来需要计算出结构的位移分布。
这一步可以通过位移影响系数法进行求解,具体来说,先在静定结构中确定一个位移分量,然后根据约束条件求得其余节点的位移分量,最终获得超静定结构的位移分布。
相比于力法,位移法的思路更加简洁明了,具体步骤如下:1. 建立超静定结构的初始刚度方程,包括构件中的整体刚度和节点位移自由度的边界条件等。
2. 将超静定结构受到的外载按照一定的规律进行分配,使得该结构从受力变形的点出发经过一系列刚度修正后,其总体刚度等于原结构的刚度。
这个修正过程是迭代的,一般采用迭代矩阵求逆的方式进行求解。
3. 当总体刚度修正后,结构的总位移就变为了一个已知量。
根据节点位移自由度的边界条件,可以直接解出各节点的位移分量。
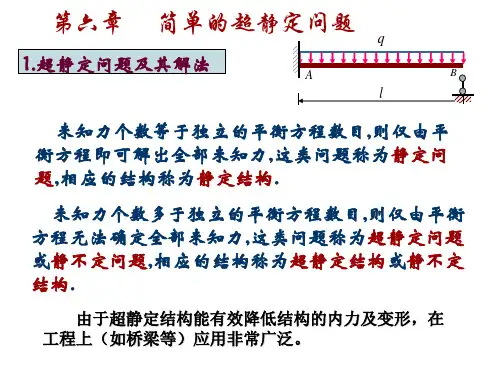
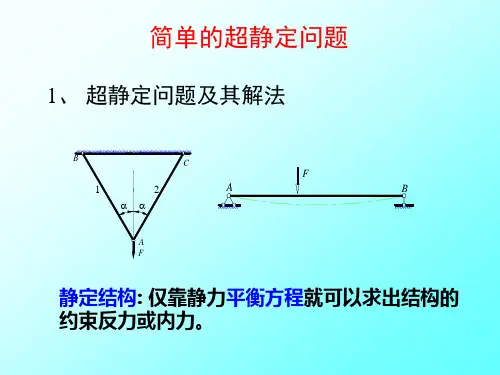
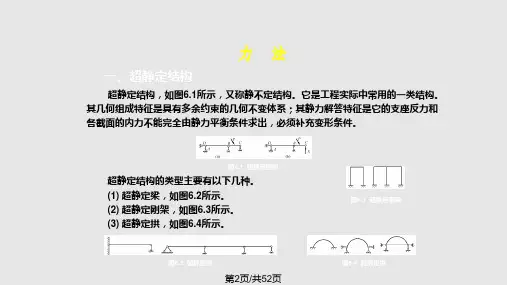
超静定问题及其解法超静定问题及其解法超静定问题及其解法1. 静定问题:结构的约束反力或构件内力通过静力学平衡方程可以确定的问题。
一、基本概念拉压静定问题A BC 12ααG超静定问题及其解法BAa l Fa a 2aM e2M e 3M e A B C D扭转静定问题弯曲静定问题超静定问题及其解法2. 超静定问题:单凭静力平衡方程不能完全确定结构约束反力或构件内力的问题。
C ABD Fαα123拉压超静定问题超静定问题及其解法扭转超静定问题弯曲超静定问题超静定问题及其解法超静定问题的工程实例大型空间桁架结构超静定问题及其解法大型桥梁结构超静定问题及其解法大型塔吊结构超静定问题及其解法大型铣床超静定问题及其解法3. 多余约束与超静定次数(1). 在超静定结构中,超过维持静力学平衡所必须的约束称为多余约束。
C A BD F αα123多余约束超静定问题及其解法多余约束超静定问题及其解法多余约束超静定问题及其解法(2). 与多余约束相对应的反力称为多余未知力,多余未知力的数目称为结构的超静定次数。
一次超静定超静定问题及其解法C ABD F αα123一次超静定超静定问题及其解法qM二次超静定超静定问题及其解法多次超静定超静定问题及其解法二. 超静定问题的一般解法核心问题:静力平衡方程不够?寻求补充方程•确定超静定次数,列出静力平衡方程;•根据变形协调条件列出变形相容方程;•将物理关系代入变形相容方程得补充方程;•联立补充方程与静力平衡方程求解;•求解杆件的内力,应力与变形等。