超静定结构两类解法
- 格式:doc
- 大小:402.50 KB
- 文档页数:19
超静定结构的解法
迭代解法主要利用迭代计算的方法,在每次迭代中修正应力和应变的分布,直到趋于稳定。
该方法的基本步骤如下:
1.假设受力的初始状态,即假设一些节点处的节点位移和内力;
2.利用结构的几何约束和材料力学性质,计算一些节点处的内力和位移;
3.判断内力和位移是否满足力学静平衡条件,若满足则计算结束,否则进入下一步;
4.通过一定的修正方法,调整节点内力和位移;
5.重复步骤2至步骤4,直到内力和位移满足力学静平衡条件。
迭代解法的优点是通用性强,适用于各种超静定结构,但收敛速度较慢,计算量较大。
弹性势能法是利用结构的势能原理,将结构的力学行为转化为弹性势能的变化来求解结构的内力和位移。
该方法的基本步骤如下:
1.根据结构的受力情况和约束条件,建立适当的势能表达式;
2.利用力学静平衡方程,将势能表达式表示为内力和位移的函数;
3.求解势能的极值点,即通过对内力和位移偏导等于零,解得内力和位移的方程;
4.建立适当的边界条件,如位移边界条件和约束条件;
5.通过求解得到的方程,计算结构的内力和位移。
弹性势能法的优点是求解过程相对简单,收敛速度较快,但要求结构能够满足一定的连通性和对称性条件。
在解超静定结构的过程中,还可以采用其他方法来辅助计算,如虚功法、位移法、能量法等。
此外,有些超静定结构也可以通过变形补偿或者加固措施等方法使之退化为静定结构,进而采用常规的静力计算方法来求解。
总之,解超静定结构是一个相对复杂的过程,需要利用附加条件和弹性支承约束来求解。
通过迭代解法和弹性势能法等方法可以得到结构的内力和位移,为实际工程中的设计和分析提供重要的参考和依据。
第八章超静定结构解法
超静定结构是指结构中的节点数超过了杆件数,即结构中的自由度超过了平衡条件的数量。
对于超静定结构的解法,需要进行位移计算和支反力计算。
位移计算可以通过以下步骤进行:
1.建立结构的刚度方程。
根据杆件的刚度和支座的自由度约束,可以建立结构的刚度矩阵。
刚度矩阵是一个n×n的矩阵,其中n是结构的自由度数量。
2.确定约束条件。
根据结构的支座约束,可以确定支座位移为零的约束条件。
3.应用边界条件。
将约束条件应用到刚度方程中,可以得到一个未知位移的方程组。
4.解未知位移。
通过解这个方程组,可以得到结构的未知位移值。
支反力计算可以通过以下步骤进行:
1.利用位移计算中得到的未知位移值,计算杆件的应力。
应力可以通过应变和材料的本构关系得到。
2.根据杆件的几何特征和应力,计算杆件的应力。
应力可以根据杆件的截面积和应力得到。
3.根据杆件的几何特征和应力,计算杆件的内力。
内力可以根据截面受力平衡的条件得到。
4.根据内力和支座约束,计算支座的反力。
反力可以通过力的平衡条件得到。
总的来说,超静定结构的解法需要进行位移计算和支反力计算。
在位移计算中,需要建立结构的刚度方程,并将约束条件以及边界条件应用到方程中,来解未知位移。
在支反力计算中,需要利用位移计算中得到的未知位移值,计算杆件的应力和内力,并根据杆件的几何特征和应力来计算支座的反力。
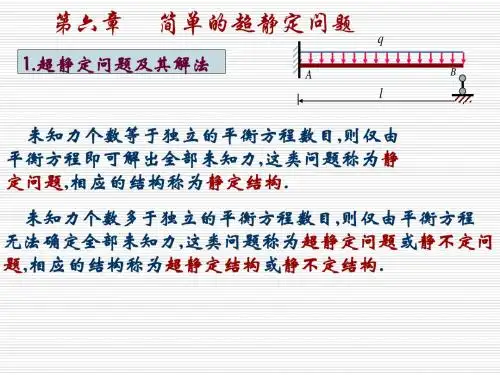

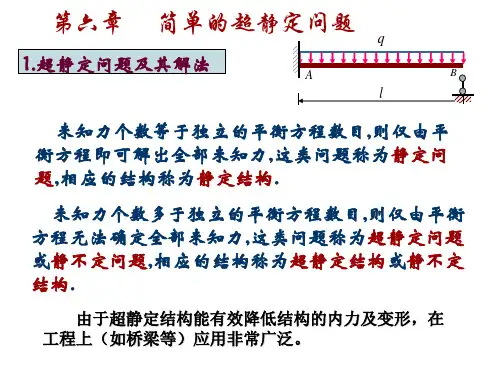
智库时代·228·智库论坛结构按照静力学特性可分为静定结构和超静定结构,静定结构的内力只需要考虑静力平衡条件即可求出,超静定结构的内力除了考虑静力平衡条件还需要考虑变形协调条件才能求出。
超静定结构解法根据所选取基本未知量的不同可分为力法和位移法,根据求解线性方程组的方法可分为直接解法和渐近解法。
现从以上两个分类角度加以比较并对不同解法在结构中的适用性进行归纳。
一、力法、位移法的比较(1)力法、位移法的发展。
力法、位移法是超静定结构内力计算的两种最基本解法。
力法是提出较早、发展最完备的计算方法,是在虚位移原理、莫尔积分的基础上发展起来的。
位移法是在20世纪为了计算复杂刚架而建立起来的,可以说力法是位移法的基础。
(2)力法、位移法的基本思路。
力法是把超静定结构通过去约束暴露多余未知力转变为静定结构,再由静定结构根据实际变形协调条件转变为超静定结构,即“超静定-静定-超静定”。
位移法是通过加约束暴露位移把结构拆成杆件,再由杆件根据静力平衡条件过渡到结构,即“结构-构件-结构”,也即先拆后搭,先离散后整合,先锁后放。
(3)力法、位移法的基本未知量。
力法的基本未知量是多余约束力,基本未知量的个数就是多余约束反力的个数。
位移法的基本未知量是独立结点位移,基本未知量的个数等于结点转角和独立结点线位移数目之和。
结点转角的数目等于刚结点的数目,独立结点线位移的数目等于铰结体系自由度的数目,一般可由观察判定。
(4)力法、位移法的基本体系。
力法的基本体系是原超静定结构中去掉多余约束代以多余未知力而得到的含有多余未知力的静定结构;位移法的基本体系是在原超静定结构中增设可控约束即在结点转角处增加刚臂,在独立结点线位移处附加链杆所形成的超静定结构。
(5)力法、位移法的基本结构。
力法的基本结构是原超静定结构中去掉多余约束和荷载得到的静定结构,即基本体系中不考虑荷载和多余未知力的结构。
位移法的基本结构是在原超静定结构中去掉荷载后增加与位移法基本未知量相应的可控约束而得到的结构,即基本体系中不考虑独立结点位移和荷载的结构。
力法求解超静定结构的步骤在结构力学中,超静定结构是指不仅能同时满足静力学平衡条件,而且还有多余的约束力,因此外加一个作用力时其约束力不会被破坏。
力法求解超静定结构是求解这类结构体系的一种有效方法,下面是力法求解超静定结构的步骤。
步骤1:建立超静定结构的外部受力与内力等效关系超静定结构的约束力有多余的约束力,即力学平衡条件所无法求解的约束力。
因此,我们需要建立超静定结构的外部受力与内力等效关系,通过已知的受力条件推导约束力的作用,确定超静定结构的内力状态。
步骤2:建立超静定结构的位移方程或应力方程建立超静定结构的位移方程或应力方程,是力法求解超静定结构的关键步骤之一。
位移方程的建立可以基于杆件测量法或截面受力法,应力方程的建立可以基于材料本构关系和边界条件等。
步骤3:解超静定结构的位移方程或应力方程解超静定结构的位移方程或应力方程,可以采用数值解法和解析解法两种方法。
数值解法主要包括矩阵法、有限元法、边界元法等,解析解法则借助微积分和常微分方程等数学方法进行求解。
步骤4:计算超静定结构的内力与应变通过已解出的位移或应力,可以计算得到超静定结构的内力状态和应变分布。
同时,超静定结构的内力状态也可以用于检验该结构的可靠性以及对超静定结构进行所需的修理和维护。
步骤5:检验超静定结构的可靠性超静定结构的可靠性检验,是通过计算得到的内力状态来评估该结构是否满足设计和使用要求的一项重要工作。
该步骤可以基于强度理论、变形理论等方法,利用计算机强度分析软件来实现。
,力法求解超静定结构是求解这类结构体系的一种常用方法。
通过以上步骤的实施,我们可以获得超静定结构的内力状态,进而检验该结构的可靠性。
1超静定结构的解法超静定结构是指结构的支座反力数目多于静力平衡方程的数目,即结构的自由度多余零,不能通过直接求解静力平衡方程得到结构的内力、位移等参数。
因此,需要使用超静定结构的解法来求解结构的响应。
超静定结构的解法主要有两种:力法和位移法。
在这里,我将分别介绍这两种方法的基本原理。
1.力法力法是指通过引入虚功原理,利用未知内力的线性平衡方程组与已知荷载、位移或位移力系数之间的关系,构建方程并求解未知内力的方法。
使用力法解决超静定结构的基本步骤如下:(1)确定支座反力。
根据结构的约束条件,计算支座反力数目;(2)选择剪力或弯矩作为未知内力。
在超静定结构中,选择剪力或弯矩作为未知内力比较常见;(3)建立线性平衡方程组。
将剪力或弯矩作为未知量,根据结构的几何条件和约束条件,建立线性平衡方程组;(4)引入荷载、位移或位移力系数。
根据结构的受力情况,将已知荷载、位移或位移力系数引入线性平衡方程组;(5)求解未知内力。
通过求解线性平衡方程组,得到未知内力。
2.位移法位移法是指通过引入位移的概念,利用位移与剪力/弯矩之间的关系,将超静定结构的内力求解问题转化为线性代数方程组的求解问题。
使用位移法解决超静定结构的基本步骤如下:(1)确定支座反力。
根据结构的约束条件,计算支座反力数目;(2)选择支座位移为未知量。
在超静定结构中,支座位移比较容易确定;(3)建立位移-力关系方程。
根据结构的几何条件和材料性质,建立位移-力关系方程,将剪力或弯矩表示为位移的函数;(4)引入荷载或位移。
根据结构的受力条件,将已知荷载或位移引入位移-力关系方程;(5)求解未知位移。
通过求解位移-力关系方程,得到未知位移;(6)求解未知内力。
将未知位移代入位移-力关系方程,求解出未知内力。
需要注意的是,在力法和位移法中,由于超静定结构的自由度数目大于零,未知内力或未知位移存在无穷多个解。
因此,需要加入合理的边界条件,如位移边界条件、力边界条件等,来确定唯一的解。
第八章 位移法位移法是计算超静定结构的第二种基本方法。
位移法是将结构拆成杆件,以杆件的内力和位移关系作为计算的基础,再把杆件组装成结构,这是通过各杆件在结点处力的平衡和变形的协调来实现的。
位移法方程有两种表现形式,即直接写出平衡方程和建立基本体系的典型方程,二者是等价的。
本章主要讨论位移法的基本原理和采用位移法计算超静定结构。
第一节 基本概念力法和位移法是分析超静定结构的两种基本方法。
力法发展较早,19世纪末已经广泛应用于分析各类超静定结构。
位移法是20世纪20年代为了解算复杂刚架结构而发展起来的。
力法与位移法的主要区别在于基本未知量的不同。
用力法计算超静定结构,是以多余未知力作为基本未知量,将超静定结构转化为静定结构,以位移协调条件为依据建立力法典型方程,求出多余未知力后再利用叠加原理或平衡条件,求出原结构的内力。
力法的出现和发展为超静定结构的受力分析提供了最基本的算法。
在一定的外因作用下,结构的内力和位移间具有一定的关系。
因此,也可把结构的某些位移作为基本未知量,通过平衡条件建立位移法方程,将这些位移求出后,利用位移和内力之间的关系,求出结构的内力,这就是位移法的基本思想。
位移法在求解超静定结构(特别是超静定梁和刚架)时比力法要简单,它也为求解超静定结构的其它解法如矩阵位移法和结构计算软件等奠定了基础。
用位移法分析超静定结构时,作如下基本假定:①以弯矩为主要内力的受弯直杆,忽略轴向变形和剪切变形的影响;②杆件的弯曲变形很小,结点转角和各杆弦转角都很微小。
由假设①可知,杆件变形前的直线长度与变形后的曲线长度相等;由假设②可知,变形后的曲线长度与弦线长度相等。
即:尽管杆件发生弯曲变形,但杆件两端结点之间的距离仍保持不变。
为了说明位移法的基本概念,研究图8-1(a)所示的刚架结构,其在荷载作用下产生虚线所示的变形。
其中,杆件AB 、AC 和AD 在刚结点A 处的转角位移是相等的,即:AB AC AD A θθθθ===支座B 为固定端,没有线位移也没有角位移。
第六章位移法超静定结构两类解法:力法:思路及步骤,适用于所有静定结构计算。
结合位移法例题中需要用到的例子。
有时太繁,例。
别的角度:内力和位移之间的关系随外因的确定而确定。
→位移法,E,超静定梁和刚架。
于是,开始有人讨论:有没有别的方法来求解或换一个角度来分析…,what?我们知道,当结构所受外因(外荷载、支座位移、温度变化等)一定⇒内力一定⇒变形一定⇒位移一定,也就是结构的内力和位移之间有确定的关系(这也可以从位移的公式反映出来)。
力法:内力⇒位移,以多余力为基本未知量…,能否反过来,也就是先求位移⇒内力,即以结构的某些位移为基本未知量,先想办法求出这些位移,再求出内力。
这就出现了位移法。
目前通用的位移法有两种:英国的、俄罗斯的,两者的实质是相同的。
以结构的某些结点位移作为基本未知量,由静力平衡条件先求出他们,再据以求出结构的内力和其它位移。
这种方法可以用于求解一些超静定梁和刚架,十分方便。
例:上面的例子,用位移法求解,只有结点转角一个未知量。
下面,我们通过一个简单的例子来说明位移法的解题思路和步骤:一个两跨连续梁,一次超静定,等截面EI=常数,右跨作用有均布荷载q,(当然可以用力法求解),在荷载q作用下,结构会发生变形,无N,无轴向变形,B点无竖向位移,只有转角ϕB。
且B点是一个刚结点传递M;变形时各杆端不能发生相对转动和移动,刚结点所连接的杆件之间角度受力以后不变。
也就是AB、BC杆在结点B处的转角是相同的。
原结构的受力和变形情况和b是等价的。
B当作固定端又产生转角ϕB。
a(原结构)AB:BC:b如果把转角ϕB 当作支座位移这一外因看,则原结构的计算就可以变成两个单跨超静定梁来计算。
显然,只要知道ϕB ,两个单跨静定梁的计算可以用力法求解出全部反力和内力,现在的未知量是ϕB (位移法的基本未知量)。
关键:如何求ϕB ?求出ϕB 后又如何求梁的内力?又如何把a ⇒b 来计算? 我们采用了这样的方法:假定在刚结点B 附加一刚臂(▼),限制B 点转角,B ⇒固定端(无线位移,无转动)(略轴向变形)原结构就变成了AB 、BC 两个单跨超静定梁的组合体:AB : ,BC :但现在和原结构的变形不符,ϕB ,所以为保持和原结构等效,人为使B 结点发生与实际情况相同的转角ϕB (以Z 1表示,统一)。
一紧一松,两者抵消,C 结构和原结构等效,也就是:两者受力和变形相同。
C 称原结构的基本结构,a 、b 、c 三个结构是相同的,现在我们可以用基本结构来代替原结构的计算,C 的未知量是Z 1,求Z 1的条件是B AqBC2)在Z 1单独作用下力法求出(1Z M 图),B 隔离体。
6Z EIR =——基本结构在Z 1单独作用下“▼”上的反力偶。
1111P 81l 通用,在Z 1处加单位转角1Z ⇒f 、1M 图061111111111=+==P R Z r Z r R lEIr (成比例), 位移法的典型方程,其中当r 11、R 1P 和Z 1同向为正。
求出EIql Z 4831=后,最后M 图叠加,11M Z M M P •+=,即原结构的M 图,由杆件平衡作出Q 图。
简单地重复一下思路: 比较力法和位移法可知:(异同点)两者所选取的基本未知量不同; 力法: 位移法:思路不同,途径不同;但所遵循的原则是一致的:利用基本结构和原结构的受力和变形相同的条件求解。
力法的基本结构是静定结构,利用多余力处的位移条件建立力法典型方程,求多余力,将超静定结构⇒静定结构来求解依据:静定结构的内力和位移计算。
并且基本结构形式可能会很多。
位移法的基本结构(一般是唯一的):单跨超静定梁的组合体(可以分开计算)。
利用附加联系处的力的平衡条件建立位移法典型方程。
求出结点位移未知量。
依据:以力法和单跨超静定梁的计算作为计算基础,单跨超静定梁的形式较少,计算可先列出通式算出来或制成表格直接查用。
这是下一节的内容。
从一例 → 第一节 位移法的基本思路a,b 变形、受力、内力相同,a 算→b 算。
若将AB ϕ、AC ϕ当作支座位移这一外因来算,原结构 → 两个单跨超静定梁的组合体分别计算,而两个单跨超静定如何计算?由力法推出的转角位移方程可以建立杆端内力←→杆端位移、荷载之间的关系:例:AC AC CA AC AC AC i M i M ϕϕ2,4==AB f AB AB AB M i M +=ϕ4 由具体荷载可以直接求出结果 BA f AB AB BA M i M +=ϕ2显然:只有知道图区段叠加法作出杆端M M AC AB ⇒⇒ϕϕ,刚结点A :A AC AB ϕϕϕ==,只有一个(结点A 的转角)未知量(位移法基本未知量)。
求A ϕ的方程,B 点M 平衡:0440=++⇒=+AC AC fABAB AB AC AB i M i M M ϕϕ 0)44(=++fAB A AC AB M i i ϕ,内力图杆端内力(位移法基本方程)⇒⇒⇒A ϕ这就是解题步骤:1)... 2)... 3)... 4)... → 杆端内力作内力图 一、位移法的解题思路超静定结构求解的前提:当结构形式一定,所受外因(外荷载、支座位移、温度变化等)一定⇒内力、反力一定⇒变形一定⇒位移一定。
也就是在一定的外因下,结构的内力和位移之间有确定的关系。
由思维的正、逆过程,分出超静定结构的两种解法:力法,内力⇒位移,以多余力作出基本未知量;位移法:位移⇒内力,以结构的某些位移为基本未知量,先想办法求出这些位移,再求出内力⇒求解一些超静定梁及刚架十分方便。
下面结合图10-11所示刚架来讨论一下位移法的解题思路:原结构(受力P作用下变形如图,1处有一结点转角Z1)(在某些结点上加上一定的附加联系(附加刚臂或附加链杆)把这些结点→固定端或铰支,如图。
基本结构,代替原结构进行计算。
(单跨超静定梁的组合体)(要使基本结构保持和原结构完全等效,也就是受力、变形相同)。
(再使各附加联系处发生与实际相符的位移,当作外因,称位移法的基本未知量)由于基本结构和原结构完全等效(力、位移),每个附加联系处产生的约束反力等于0。
则(结论):基本结构在原荷载及这些结点位移共同作用下在各个附加联系上产生的总约束力等于0的平衡条件建立位移法典型方程。
(计算手段:人头顶砖)利用叠加法分别求出基本结构在原荷载作用下的约束反力基本结构在各结点未知量作用下的约束反力,叠加法。
求这些约束反力的基础:单跨超静定梁的转角位移方程→求解位移法典型方程,求出结点位移未知量→叠加出最后M(杆件平衡)→Q(结点平衡)→N作出内力图。
1、弯矩正负问题。
1)正负的规定2)M成对出现3)弯矩方向和受拉边的关系2、附加约束再放松结点位移是解题的一种思路和手段。
3、结合一个简单的刚架例子重述步骤。
位移法基本未知量可以通过作出位移变形图来确定,但比较麻烦,归纳出一般的规律,和基本结构的选取同时进行。
§10-2等截面直杆的转角位移方程位移法中将杆件看作单跨超静定梁,杆端位移可看作单跨超静定梁的支座位移。
单跨超静定梁在荷载、支座位移(杆端位移)作用下的杆端弯矩和剪力(杆端内力)之间的关系式,对于等截面直杆,它们的关系有一个统一的表达式,称为转角位移方程。
本节主要推导此关系式:一、杆端内力及杆端位移的表示方法及正负号规定:1、杆端内力(M、Q):M ik、Q ik(i杆端,k同一杆的远端);(ik为M所属的杆件)杆端位移(ϕ、Δ):A:u A、v A、ϕAB:u B、v B、ϕB=v B - v A AB两端在垂直于杆轴方向上的相对线位移ΔABβ=ΔAB/l 弦转角表杆端的相对线位移2、正负规定:杆端弯矩M AB、M BA:绕杆端顺时针为正,逆时针为负。
(对结点或支座而言,以逆时针为正)杆端剪力Q AB、Q BA:绕隔离体以顺时针转动为+。
结点转角(杆端转角)ϕA、ϕB弦转角βAB(表杆轴弦转的方向):以顺时针转动为正两端的相对线位移:以使杆件顺时针转动为正,反之为负。
注:对杆端弯矩作规定,对其它截面弯矩并没作规定。
作弯矩图时,应先按此符号规定正确判定杆件的受拉边,M图画在受拉边,不标正负号。
二、位移法的计算假定:a、忽略轴力产生的轴向变形的影响⇒①杆件变形前的直线长=变形后的曲线长度。
b、弯曲变形是微小,ϕ、β(Δ)很少⇒②杆件变形后的曲线长度=弦线长度例:ϕA、ϕB、ΔAB、βAB、ϕ①②⇒推论1):尽管杆件产生弯曲变形,但直杆件两端(杆件两端)点之间的沿杆的轴线方向的距离变形前后仍保持不变。
也就是u A=u B;直杆两端的水平位移相等。
推论2):直杆的一端不变动而杆发生弯曲变形时,杆的另一端的线位移⊥杆原轴线。
或两个不动点,引出两直杆的交点,也是不变动的。
也就是u A=u B=0c、略去剪切变形对位移的影响,剪切角γ=0推论3):杆件轴挠曲线上某点之切线的倾角ϕ(与杆原轴线夹角)便是该点横截面的转角。
ϕ=θ+r⇒ϕ=θ在力法中也有类似的假定,只不过当时未强调而已。
在超静定梁、刚架的位移系数计算时:1)不考虑N引起的轴向变形⇒位移2)不考虑Q引起的剪力变形⇒位移3)小变形假设由力法对于单跨静定梁,杆端M、Q(内力)是由荷载和(ϕA、ϕB、ΔAB、βAB 杆端位移所决定的。
也就是它们之间存在有确定的关系,等截面直杆的转角位移方程。
三、等截面直杆的转角位移方程三种常见形式的单跨超静定梁:由荷载作用、温度变化、支座移动引起的杆端力可由力法求得。
一般→特殊 1、两端固定的梁:(1)受任意荷载作用(或温度变化):f AB M 、f BA M 、 f AB Q 、fBA Q ——固端弯矩。
(可由力法求得):表10-1。
(2)支座移动作用: ϕA 、ϕB 、ΔAB 、(都假设为正):也可由力法求得 (3)ϕA 、ϕB 、ΔAB 和荷载共同作用下:由叠加原理:fAB B A AB AB M l i i i M +∆-+=624ϕϕf ABA B BA BA M li i i M +∆-+=624ϕϕ (1)i=EI/l 杆件的线刚度。
两端固定的单跨超静定梁转角位移方程。
注:也可用于刚架中有轴力的杆件。
因为对于小挠度问题(小变形范围)可以不考虑N 、M 之间的相互影响,也就是轴向变形和弯曲变形之间是相互独立的。
2、一端固定,一端铰支的单跨超静定梁(1)受任意荷载作用(或温度变化):f AB M 、f BA M 、 f AB Q 、fBA Q (可由力法求得):表10-1。
(2)支座移动作用: ϕA 、ΔAB 、(都假设为正):也可由力法求得 (3)ϕA 、ΔAB 和荷载共同作用下:由叠加原理:fAB A AB ABM li i M +∆-=33ϕ 0=BA M (2)也可由(1)式得: 0624=+∆-+=fAB A B BA BAM l i i M ϕϕ 解出ϕB ,代入(1)式就可得(2)式。