单自由度体系-1汇总
- 格式:ppt
- 大小:1.30 MB
- 文档页数:8
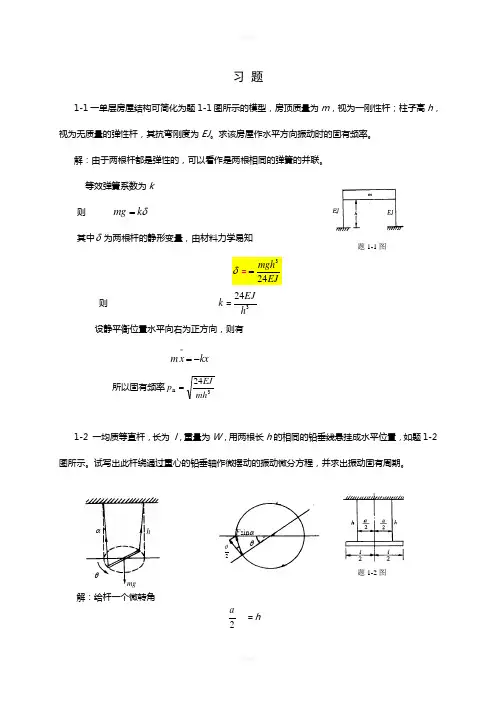
习 题1-1一单层房屋结构可简化为题1-1图所示的模型,房顶质量为m ,视为一刚性杆;柱子高h ,视为无质量的弹性杆,其抗弯刚度为EJ 。
求该房屋作水平方向振动时的固有频率。
解:由于两根杆都是弹性的,可以看作是两根相同的弹簧的并联。
等效弹簧系数为k 则 mg k δ=其中δ为两根杆的静形变量,由材料力学易知δ=324mgh EJ=则 k =324EJh设静平衡位置水平向右为正方向,则有 "m x kx =- 所以固有频率3n 24mhEJp =1-2 一均质等直杆,长为 l ,重量为W ,用两根长h 的相同的铅垂线悬挂成水平位置,如题1-2图所示。
试写出此杆绕通过重心的铅垂轴作微摆动的振动微分方程,并求出振动固有周期。
解:给杆一个微转角2a =h题1-1图题1-2图θF sin α2θαhmgθ2F cos =mg由动量矩定理:aha mg a mg Fa M ml I M I 822cos sin 12122-=-≈⋅-====αθαθ&&其中12cossin ≈≈θααhl ga p ha mg ml n 22222304121==⋅+θθ&& g h a l gah l p T n 3π23π2π222===1-3求题1-3图中系统的固有频率,悬臂梁端点的刚度分别是k 1和k 3,悬臂梁的质量忽略不计。
解:悬臂梁可看成刚度分别为k 1和k 3的弹簧,因此,k 1与k 2串联,设总刚度为k 1ˊ。
k 1ˊ与k 3并联,设总刚度为k 2ˊ。
k 2ˊ与k 4串联,设总刚度为k 。
即为21211k k k k k +=',212132k k kk k k ++=',4241213231421432421k k k k k k k k k k k k k k k k k k k k ++++++=)(42412132314214324212k k k k k k k k k k m k k k k k k k k k p ++++++=1-4求题1-4图所示的阶梯轴一圆盘系统扭转振动的固有频率。
第三章单自由度体系自由振动和强迫振动时域分析3.1力学模型•单自由度体系:SDOF(Single-Degree-of-Freedom )System•结构的运动状态仅需要一个几何参数即可以确定•分析单自由度体系的意义:1、单自由度系统包括了结构动力分析中涉及的所有物理量及基本概念。
2、很多实际的动力问题可以直接按单自由度体系进行分析计算。
3、多自由度系统在很多情况下可以转变为单自由度系统进行分析重力的影响1、考虑重力影响时,结构体系的运动方程与无重力影响时的运动方程完全一样,此时u是由动荷载引起的动力反应。
在研究结构的动力反应时,可以完全不考虑重力的影响,建立体系的运动方程,直接求解动力荷载作用下的运动方程,即得到结构体系的动力解。
2、当需要考虑重力影响时,结构的总位移为总位移=静力解+动力解应用叠加原理将结构的动力反应和静力反应相加即得到结构的总体反应。
在结构反应问题中,应用叠加原理可将静力问题(一般是重力问题)和动力问题分开计算。
重力的影响3、注意1:由于应用了叠加原理,上述结论是用于线弹性体系。
4、注意2,在以上推导过程中,假设悬挂的弹簧―质点体系只发生竖向振动,在动荷载作用之前,重力被弹簧的弹性变形所平衡,而施加荷载后,重力始终被弹性变形所平衡。
如果重力的影响没有预先被平衡,则在施加动力荷载产生进一步变形后,可以产生二阶影响问题,例如P―Δ效应。
1.1无阻尼自由振动运动方程的通解为:121212()n n i ti ts ts tu t c e c ec ec eωω−=+=+指数函数与三角函数的关系:cos sin cos sin ixixe x i x ex i x−=+=−运动方程的解:()cos sin n n u t A t B tωω=+A ,B —待定常数,由初始条件确定。
一些重要性质:(1)自振周期只与结构的质量和结构的刚度有关,与外界的干扰因素无关。
(2)自振周期与质量的平方根成正比,质量越大,周期越大(频率越小);自振周期与刚度的平方根成反比,刚度越大,周期越小(频率越大);要改变结构的自振周期,只有从改变结构的质量或刚度着手。
结构动力学Dynamics of Structures 第三章单自由度体系Chapter 3 Single-Degree-of-Freedom SystemsPart 1华南理工大学土木工程系马海涛/陈太聪本章主要目的及内容目的:z 通过单自由度体系介绍动力学的基本概念z 若干实际问题的解内容:(1)无阻尼自由振动(2)有阻尼自由振动(3)对简谐荷载的反应(4)对周期荷载的反应(5)对任意荷载的反应(6)体系的阻尼和振动过程中的能量(7)隔振(震)原理(8)结构地震反应分析的反应谱法自由振动free vibration强迫振动forced vibration第三章单自由度体系SDOF Systems自由振动:结构受到扰动离开平衡位置以后,不再受任何外力影响的振动过程。
0mucu ku ++= 无阻尼自由振动单自由度系统的运动方程()mucu ku P t ++=00c muku =⇒+= 自由振动运动方程单自由度系统无阻尼自由振动的运动方程0muku += 初始扰动:00(0)(0)t t u u uu ==== 初始位移初始速度二阶齐次常微分方程Homogeneous second orderordinary differential equation无阻尼自由振动的数学模型000;(0),(0)t t muku u u uu ==+=== 初始条件Initial conditions2()0stC ms k e +=设解有以下形式()stu t Ce=代入方程得 C 和s 为待定常数。
因此,方程通解为:121212()n n i ti ts t s tu t C e C eC eC eωω−=+=+或模型求解0muku += 2ms k ⇒+=1,2n ks i mω⇒=±=±()cos sin n n u t A t B tωω=+三角函数形式通解()sin cos n n n n ut A t B t ωωωω=−+00(0)(0)t n t u A u uB u ω====== (0)()(0)cos sin n n nuu t u t tωωω=+(0)(0),nuA uB ω⇒==利用初始条件,我们有单自由度系统无阻尼自由振动问题的解其中n kmω=无阻尼自由振动为简谐运动Simple harmonic motion ωn 称为圆频率或角速度Angular frequency / velocity ()cos sin n n u t A t B tωω=+三角函数形式通解()sin cos n n n n ut A t B t ωωωω=−+振幅无阻尼自由振动问题解的图示(1)振幅–Amplitude of motion[]220(0)(0)n u u u ω⎡⎤=+⎢⎥⎣⎦基本参数(2)固有周期–Natural period of vibration2n nT πω=(3)固有频率–Natural frequency of vibration1n nf T =Hz (赫兹)固有频率s (秒)固有周期rad/s (弧度/秒)固有圆频率单位定义物理量名称2n nT πω=1n nf T =n k m ω=单自由度系统无阻尼自由振动系统参数§3.2 有阻尼自由振动0c uk u m u ++= 运动方程2()0stC ms cs k e ++=设解有以下形式()stu t Ce =代入方程得解为:221,222nc c s m m ω⎛⎞=−±−⎜⎟⎝⎠粘性阻尼模型2ms cs k ++=2c k s s m m++=22n c s s mω++=阻尼系数影响此项的取值进一步决定解的特征Critical damping and damping ration临界阻尼22022n cr n c c m m k c m ωω⎛⎞−=⇒⎜⎟⎝⎠===此时运动方程的解为12ns s ω==−()()n tu t A Bt e ω−=+0mucu ku ++= 验证—分别将两个解代入方程()n tu t Aeω−=()n tu t Bteω−=()22220n t nnnAem m m ωωωω−=−+=()2n t nnAem c k ωωω−−+左端=()()221n t nnnBem t c t kt ωωωω−⎡⎤−++−+⎣⎦左端=()2220n tnnnBec m t m k ωωωω−⎡⎤=−+−+=⎣⎦Critical damping and damping ration运动方程的解为()()n tu t A Bt e ω−=+()()(0)(1)(0)n tn u t u t ut e ωω−=++ (0)(0)n u AuA B ω==−+ 因此,解为根据初始条件,有()()n tn u t A Bt B eωω−=−++⎡⎤⎣⎦ 对应的速度表达式为(0)(0)(0)n A u B u uω==+ 或者(0)()(0)1(0)n t n uu t u t e u ωω−⎡⎤⎛⎞=++⎢⎥⎜⎟⎝⎠⎣⎦(0)()(0)1(0)n t n uu t u t e u ωω−⎡⎤⎛⎞=++⎢⎥⎜⎟⎝⎠⎣⎦ 解的特征由此项控制当阻尼大于临界阻尼时,0mucu ku ++= 220n n uu u ζωω++= 2n crc cm c ζω==其中,阻尼比1221120()s ts ts s u t C e C e<<=+临界阻尼可定义为:体系自由振动反应中不出现往复振动所需的最小阻尼值。
第三章单自由度机械系统动力学3.1 概述在绪论中我们曾指出:机械动力学研究机械在运动时所受的力,以及机械在力作用下的运动。
在第一类问题中,假定输入构件按给定的某种规律运动,计算在此运动情况下需施加于驱动构件上的平衡力矩及运动副中的反力,称为逆动力学。
本书第一章和第二章都属于逆动力学问题。
在第二类问题中,抛掉输入构件按某种给定规律运动的假定,求解在施加于机械的真实外力的作用下,机械系统的运动随时间而变化的规律,称为正动力学。
本章即讨论正动力学问题。
图3.1.1A一停车阶段B一启动阶段;C稳定运转阶段;机械运转的三个阶段,如图3.1.1所示,机械系统从启动到停车的全过程中包含三个阶段:启动阶段(A)稳定运转阶段(B)和停车阶段(C)。
在机械的稳定运转阶段,由于外力的周期性变化,机械的速度会产生周期性的波动。
速度波动会在运动副中产生附加动压力,引起系统的振动,降低机械工作的精度和可靠性。
研究机械的真实运动和调节速度波动的方法就需要进行动力学分析。
在机械的启动阶段和停车阶段,即所谓过渡历程中,会产生较大的动载荷。
在进行机械零部件的强度计算时,常需要知道这一动载荷。
对启动频繁的机械,启动和制动所需要的时间也常常是人们感兴趣的问题。
这也都需要进行动力学分析。
本章首先研究应用最为广泛的单自由度机械系统的动力学分析。
在研究单自由度机械系统时历来都采用一种等效力学模型来代替原有的机械系统。
本章仍介绍这种传统的方法。
这种传统方法只局限在单自由度系统中应用,而不适用于多自由度系统。
由于各种自动机和机器人的出现,多自由度系统应用越来越广泛。
基于多自由度系统分析的需要,提出了多种动力学建模方法,并开发了相应的计算机软件。
单自由度系统是多自由度系统的一个特例,当然也可以用这类通用的方法和软件来进行分析。
在下一章中研究多自由度机械系统的动力学分析时,我们再对这些建模方法做一综合介绍。
单自由度机械系统动力学分析大体包括以下几个步骤:1)将实际的机械系统简化为等效动力学模型;2)根据等效动力学模型列出系统的运动微分方程;3)应用解析方法或数值方法求解系统运动微分方程,求出等效构件的运动规律。
第3章单自由度系统汇总第三章单自由度机械系统动力学3.1 概述在绪论中我们曾指出:机械动力学研究机械在运动时所受的力,以及机械在力作用下的运动。
在第一类问题中,假定输入构件按给定的某种规律运动,计算在此运动情况下需施加于驱动构件上的平衡力矩及运动副中的反力,称为逆动力学。
本书第一章和第二章都属于逆动力学问题。
在第二类问题中,抛掉输入构件按某种给定规律运动的假定,求解在施加于机械的真实外力的作用下,机械系统的运动随时间而变化的规律,称为正动力学。
本章即讨论正动力学问题。
图3.1.1A一停车阶段B一启动阶段;C稳定运转阶段;机械运转的三个阶段,如图3.1.1所示,机械系统从启动到停车的全过程中包含三个阶段:启动阶段(A)稳定运转阶段(B)和停车阶段(C)。
在机械的稳定运转阶段,由于外力的周期性变化,机械的速度会产生周期性的波动。
速度波动会在运动副中产生附加动压力,引起系统的振动,降低机械工作的精度和可靠性。
研究机械的真实运动和调节速度波动的方法就需要进行动力学分析。
在机械的启动阶段和停车阶段,即所谓过渡历程中,会产生较大的动载荷。
在进行机械零部件的强度计算时,常需要知道这一动载荷。
对启动频繁的机械,启动和制动所需要的时间也常常是人们感兴趣的问题。
这也都需要进行动力学分析。
本章首先研究应用最为广泛的单自由度机械系统的动力学分析。
在研究单自由度机械系统时历来都采用一种等效力学模型来代替原有的机械系统。
本章仍介绍这种传统的方法。
这种传统方法只局限在单自由度系统中应用,而不适用于多自由度系统。
由于各种自动机和机器人的出现,多自由度系统应用越来越广泛。
基于多自由度系统分析的需要,提出了多种动力学建模方法,并开发了相应的计算机软件。
单自由度系统是多自由度系统的一个特例,当然也可以用这类通用的方法和软件来进行分析。
在下一章中研究多自由度机械系统的动力学分析时,我们再对这些建模方法做一综合介绍。
单自由度机械系统动力学分析大体包括以下几个步骤:1)将实际的机械系统简化为等效动力学模型;2)根据等效动力学模型列出系统的运动微分方程;3)应用解析方法或数值方法求解系统运动微分方程,求出等效构件的运动规律。
y sy(t)s=-k(y+y s )w=mg F(t)=-m y§1 单自由度体系的自由振动一、无阻尼的自由振动:如下图,以单自由度体系为例,设此梁上的集中质量为m ,其重量为W mg =,梁由于质量的重力引起的质量处的静力位移用s y 表示,与s y 相应的质量位置称为质量的静力平衡位置。
若此质量受到扰动离开了静力平衡位置,当扰动除去后,则体系将发生振动,这样的振动称为体系的自由振动。
由于振动的方向与梁轴垂直,故称为横向振动。
在此,只讨论微小振幅的振动,由振动引起的内力限于材料的弹性极限以内,用以表示质量运动的方程将为线性微分方程。
1、建立运动方程建立运动方程常用的基本原理是达朗伯原理(亦称惯性力法或动静法)。
今考虑在振动过程的某一瞬时t ,设质量在此瞬时离开其平衡位置的位移为y ,取质量为隔离体,则在质量上作用有三种力:质量的重量W ,杆件对质量的弹性恢复力S 和惯性力F(t)。
根据达朗伯原理,这三个力应成平衡,即 W+S+F(t)=0 (1) 在弹性体系中,弹性恢复力S 为 ()s k y y s =-+上式中的K 为一常数,称为刚度系数,代表简支梁上使质量在运动方向产生单位位移时需要加在质量上的沿质量运动方向的集中力的量值。
式中负号表示s 的指向和位移的方向相反。
而 1y s W k=⋅ 即 y s W k =⋅因此,将()s k y y s =-+和y s W k =⋅代入式(1)得()0F t ky =-+ (2)上式表明,如果以静力平衡位置作为计算位移的起点,则建立体系的运动方程时,可以不考虑重力W 的影响。
这对其他体系的振动(包括受迫振动)也同样适用。
将22()d yF t m dt =-代入式(2)得:22()0d ym ky t dt+= 令2k m ω= dyy dt= (速度) 22d y y dt =(加速度) 则 22()0d ym ky t dt+= 可变为 20y y ω+= (3)此为单自由度体系无阻尼自由振动的运动方程,它反映了这种振动的一般规律。