第二节 单自由度体系的运动方程
- 格式:ppt
- 大小:290.50 KB
- 文档页数:11
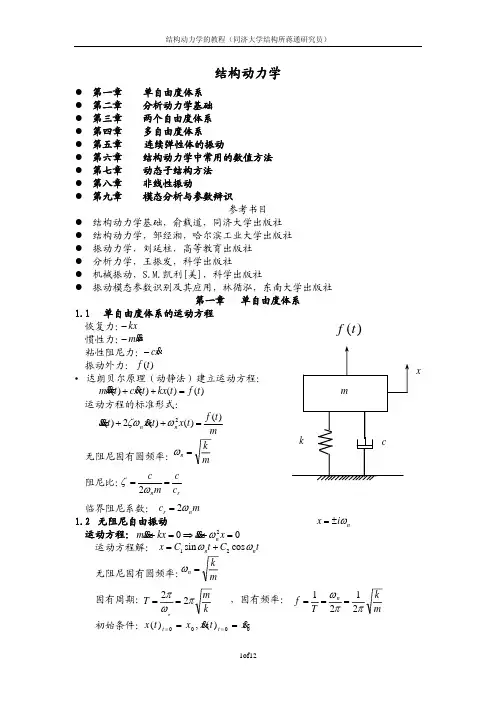

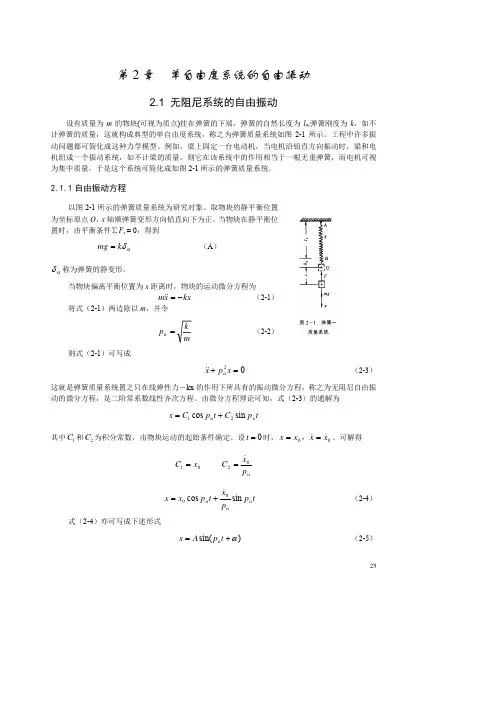
25第2章 单自由度系统的自由振动2.1 无阻尼系统的自由振动设有质量为m 的物块(可视为质点)挂在弹簧的下端,弹簧的自然长度为l 0,弹簧刚度为k ,如不计弹簧的质量,这就构成典型的单自由度系统,称之为弹簧质量系统如图2-1所示。
工程中许多振动问题都可简化成这种力学模型。
例如,梁上固定一台电动机,当电机沿铅直方向振动时,梁和电机组成一个振动系统,如不计梁的质量,则它在该系统中的作用相当于一根无重弹簧,而电机可视为集中质量。
于是这个系统可简化成如图2-1所示的弹簧质量系统。
2.1.1自由振动方程以图2-1所示的弹簧质量系统为研究对象。
取物块的静平衡位置为坐标原点O ,x 轴顺弹簧变形方向铅直向下为正。
当物块在静平衡位置时,由平衡条件∑F x = 0,得到st δk mg = (A )st δ称为弹簧的静变形。
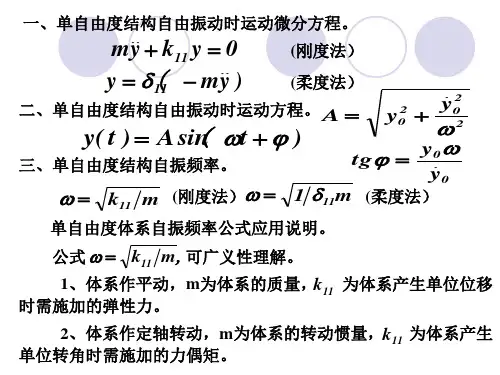
当物块偏离平衡位置为x 距离时,物块的运动微分方程为mxkx &&=− (2-1) 将式(2-1)两边除以m ,并令mkp =n (2-2) 则式(2-1)可写成02n =+x p x && (2-3)这就是弹簧质量系统置之只在线弹性力-kx 的作用下所具有的振动微分方程,称之为无阻尼自由振动的微分方程,是二阶常系数线性齐次方程。
由微分方程理论可知,式(2-3)的通解为t p C t p C x n 2n 1sin cos +=其中C 1和C 2为积分常数,由物块运动的起始条件确定。
设0=t 时,x x xx ==00,&&。
可解得 C x 10= n02p xC &=t p p xt p x x n n0n 0sin cos &+= (2-4) 式(2-4)亦可写成下述形式)sin(n α+=t p A x (2-5)26 其中⎪⎪⎩⎪⎪⎨⎧=+=)arctan()(00n 2n020x x p p x x A &&α (2-6) 式(2-4)、(2-5)是物块振动方程的两种形式,称为无阻尼自由振动,简称自由振动。
单自由度振动系统的运动方程及其解析解单自由度振动系统是指只有一个自由度的振动系统,其运动方程可以用一个二阶常微分方程表示。
在这篇文章中,我们将讨论单自由度振动系统的运动方程及其解析解。
1. 引言振动是自然界中一种常见的现象,也是物体在受到扰动后产生的周期性运动。
单自由度振动系统是研究振动现象的基本模型,它可以用来描述弹簧振子、摆锤等物理系统的振动。
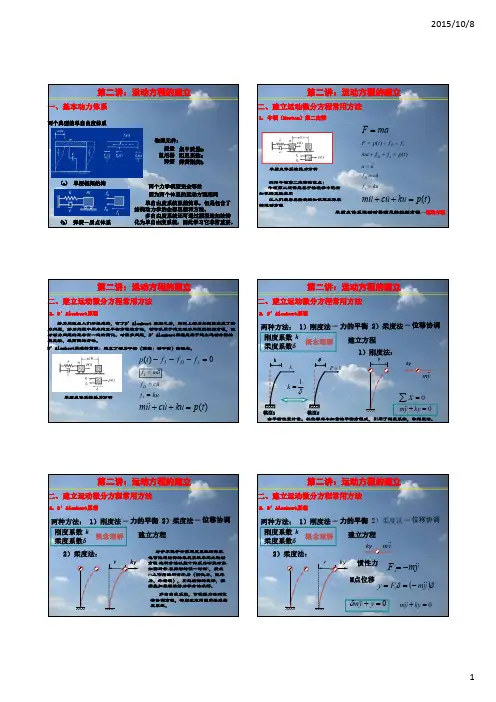
2. 运动方程的建立对于单自由度振动系统,其运动方程可以通过牛顿第二定律推导而来。
假设系统的质量为m,位移为x,系统受到的外力为F,弹性系数为k,则可以得到如下的运动方程:m*x'' + k*x = F3. 简谐振动的解析解当外力为零时,即F=0,单自由度振动系统的运动方程简化为:m*x'' + k*x = 0这是一个常系数线性齐次二阶常微分方程,可以通过特征方程的方法求解。
假设解为x(t) = A*cos(ωt + φ),代入方程中可以得到:-m*ω^2*A*cos(ωt + φ) + k*A*cos(ωt + φ) = 0整理得到:(ω^2*m - k)*A*cos(ωt + φ) = 0由于A*cos(ωt + φ)不为零,所以可以得到特征方程:ω^2*m - k = 0解特征方程可以得到系统的固有频率:ω = sqrt(k/m)因此,单自由度振动系统的解析解为:x(t) = A*cos(ωt + φ)其中A和φ为待定常数,分别表示振幅和相位。
4. 非简谐振动的解析解当外力不为零时,即F≠0,单自由度振动系统的运动方程为:m*x'' + k*x = F这是一个非齐次线性二阶常微分方程,可以通过特解和通解的方法求解。
首先求解齐次方程,得到通解:x_h(t) = A*cos(ωt + φ)然后求解非齐次方程的特解,可以通过待定系数法或者复数法得到特解。
最后将通解和特解相加,得到系统的解析解:x(t) = x_h(t) + x_p(t)其中x_h(t)为齐次方程的通解,x_p(t)为非齐次方程的特解。
单自由度振动系统的运动方程解析解的振动幅度研究单自由度振动系统是一种物理系统,其运动方程可以通过解析方法得到振动幅度的研究。
在这篇文章中,我们将探讨单自由度振动系统的运动方程解析解,并研究振动幅度的表达式。
1. 引言单自由度振动系统是指只有一个自由度的振动系统,例如简谐振动器。
在工程和物理学中,单自由度振动系统的研究非常重要,因为它可以帮助我们理解更为复杂的振动系统。
2. 单自由度振动系统的运动方程单自由度振动系统的运动方程可以通过牛顿第二定律得到。
假设系统质量为m,弹性系数为k,阻尼系数为c,则其运动方程可以写为:m * x''(t) + c * x'(t) + k * x(t) = F(t)其中,x(t)是系统在时间t的位移,x'(t)和x''(t)分别是x(t)的一阶和二阶导数,F(t)是外力。
3. 没有外力的情况在没有外力作用下的情况下(F(t) = 0),上述运动方程可以简化为:m * x''(t) + c * x'(t) + k * x(t) = 04. 弹簧阻尼器情况考虑到弹簧阻尼器的情况,即运动方程中包含了阻尼系数c。
当没有外力作用下的情况下,上述运动方程可以写为:m * x''(t) + c * x'(t) + k * x(t) = 0为了求解该线性齐次方程,可以猜测x(t)的解为e^(rt),其中r是待定常数。
将猜测解带入方程,得到特征方程:m * r^2 + c * r + k = 0解特征方程,可以得到r的值。
根据r的值的不同情况,振动系统的运动可以分为三种情况:欠阻尼、过阻尼和临界阻尼。
5. 欠阻尼情况当特征方程的根为复数时,振动系统处于欠阻尼情况。
对于欠阻尼情况,振动系统的解可以写为:x(t) = e^(-ζωn*t) * [A * cos(ωd * t) + B * sin(ωd * t)]其中,ζ是阻尼比,ωn是系统的自然角频率,A和B是常数,ωd 是阻尼角频率。