第六章——附有参数的条件平差
- 格式:ppt
- 大小:1.40 MB
- 文档页数:21
附有系统参数的平差及其参数显著性检验摘要:通过对测量误差中系统误差影响及重要性的分析,对附有系统参数平差原理进行了探讨,得出了其平差数学模型和系统参数显著性检验的方法,最后利用某实测数据进行验证计算。
关键字:系统参数;平差;显著性检验1.引言观测误差按性质分为三种成分:粗差、系统误差、偶然误差。
但在经典平差中,通常假定观测值中仅包含系统误差。
经典平差中是假定观测误差中不含有系统误差,但测量实践证明,尽管在观测过程中会采用各种观测措施减少系统误差,并在观测后对观测数据进行了必要的处理,但难以避免观测值中仍含有系统误差。
因此,在平差前完全剔除粗差和消除系统误差的影响是不可能的。
随着测量精度的不断提高,对平差结果的精度要求也愈来愈高,近年来出现了通过平差剔除粗差和消除系统误差对平差结果影响的方法。
传统上剔除观测值的粗差,通常是在平差之前进行,比如采用避免粗差的观测程序,增加多余观测,以及用几何条件闭合差控制粗差等,尽管采用这些措施,一些小的粗差仍然是不可避免的。
1968年,巴尔达(W.Baarda)在他的名著《大地网的检验方法》中,首先用数理统计方法阐述了测量系统的可靠性理论和检验粗差的“数据探测(Data-Snooping)”法。
为在平差过程中自动剔除粗差提供了理论基础;而对平差过程中消除系统误差对平差结果影响的方法,在航空摄影测量学中称为自检校平差。
这种平差方法的基本思想是,在仅含偶然误差模型式的基础上,加入一些附加参数(或称系统参数)用以补偿在观测数据中存在的系统误差对平差结果的影响。
但在函数模型中加入附加参数后,可能会引起附加参数之间或附加参数与基本参数之间的强相关,而使法方程性质恶化,为使法方程性质不致变坏,应剔除一些参数。
附加参数的统计检验就是解决这个问题的。
随着对测量精度的要求越来越高,一些精密工程测量中考虑了系统参数对平差结果的影响。
比如在高速铁路的CPIII测量中、大型GPS网的监测等。
第一章绪论第二、三章全书的基础知识第四章介绍测量平差理论第五、六、七、八章 4种平差方法第九章各种平差方法的总结第十章讨论点位精度第十一章统计假设检验的知识第十二章近代平差概论根据本科教学大纲的要求,重点讲解第二章~第八章以及第十章的内容。
二、怎样学好测量平差1. 要有扎实的数学基础。
只有牢固地掌握了高等数学,线性代数和概率与数理统计等课程的知识才能学好测量平差,因此课前要做到预习,对与以上三门课程有关内容进行复习,只有这样才能听懂这一节课。
2. 听课时弄清解决问题的思路,掌握公式推导的方法以及得到的结论,培养独立思考问题和解决问题的能力。
3. 课后及时复习并完成一定数量的习题(准备A、B两个练习本),从而巩固课堂所学的理论知识。
第一章绪论本章主要说明观测误差的产生和分类,测量平差法研究的内容以及本课程的任务。
第二章误差分布与精度指标全章共分5节,是本课程的重点内容之一。
重点:偶然误差的规律性,精度的含义以及衡量精度的指标。
难点:精度、准确度、精确度和不确定度等概念。
要求:弄懂精度等概念;深刻理解偶然误差的统计规律;牢固掌握衡量精度的几个指标。
第三章协方差传播律及权重点:协方差传播律,权与定权的常用方法,以及协因数传播律。
难点:权,权阵,协因数和协因数阵等重要概念的定义,定权的常用方法公式应用的条件,以及广义传播律(协方差传播律和协因数传播律)应用于观测值的非线性函数情况下的精度评定问题。
要求:通过本章的学习,弄清协因数阵,权阵中的对角元素与观测值的权之间的关系;能牢固地掌握广义传播律和定权的常用方法的全部公式,并能熟练地应用到测量实践中去,解决各类精度评定问题。
第四章平差数学模型与最小二乘原理全章共分5节。
重点:测量平差的基本概念,四种基本平差方法的数学模型和最小二乘原理。
难点:函数模型的线性化,随机模型。
要求:牢固掌握本章的重点内容;深刻理解最小二乘原理中“最小”的含义;对于较简单的平差问题,能熟练地写出其数学模型。

《误差理论与数据处理》课程教学大纲【课程代码】:13319608【英文译名】:Error Theory and Surveying Adjustment 【适用专业】:地理信息系统【学分数】:4 【总学时数】:64一、本课程教学目的和课程性质误差理论与数据处理是地理信息系统专业的工程技术基础必修课之一、通过学习本门课程,使学生能够应用概率和数理统计方法来分析观测数据,采用最小二乘法作为处理观测数据的基本原则,合理计算处理,以得到更接近真值的结果。
在内容上,主要讲解测量平差的基本原理、方法和技能;论述近代测量平差的基本理论与方法,介绍测量数据处理的最新研究成果。
二、本课程的基本要求通过本门课程的学习,掌握平差课程的任务和研究对象,并很好的掌握几种主要的平差方法.在了解了近代平差基本理论和最新的研究成果基础上,在后续的课程中灵活应用对数据的处理和误差分析,为以后的工作和进一步深造打下良好的基础。
三、本课程与其他课程的关系前修课程:测量学、高等数学、线性代数、概率论与数理统计;后续课程:GPS原理、摄影测量学、遥感原理与应用。
四、课程内容《误差理论与数据处理》是研究误差的一门学科,通过学习本门课程,使学生能正确处理测量数据,合理计算处理,以得到理想的结果。
本课程要求:基本知识的掌握,掌握误差的基本概念,不同性质误差的变化规律及处理方法。
权的概念及不等精度测量的数据处理方法,误差的合成及分配,回归、相关等。
本课程内容安排如下:第一章绪论基本内容:主要介绍有关误差的一些基本概念,观测误差及测量平差理论研究的对象。
属于了解内容。
第二章误差分布及精度指标环境与资源学院基本内容:本章节主要介绍有关平差的含义、观测条件、系统误差、偶然误差的概念。
及偶然误差的统计规律性及精度、方差、中误差的概念。
重点:掌握概念:观测条件、系统误差、偶然误差;难点:偶然误差的规律性以及所服从的分布;第三章协方差传播律及权基本内容:本章节主要介绍有关协因数传播率的概念及应用领域,使学生掌握协因数、协因数阵、权阵的概念;掌握协因数传播律的一般形式与特殊形式权倒数传播律。
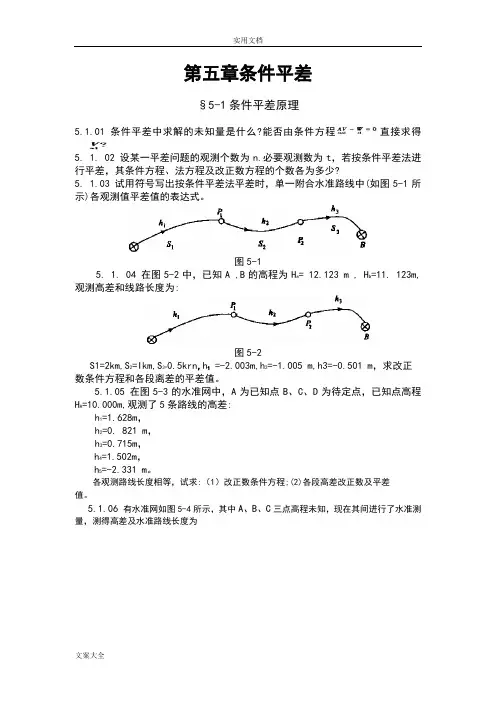
第五章条件平差§5-1条件平差原理5.1.01 条件平差中求解的未知量是什么?能否由条件方程直接求得5. 1. 02 设某一平差问题的观测个数为n.必要观测数为t,若按条件平差法进行平差,其条件方程、法方程及改正数方程的个数各为多少?5. 1.03 试用符号写出按条件平差法平差时,单一附合水准路线中(如图5-1所示)各观测值平差值的表达式。
图5-15. 1. 04 在图5-2中,已知A ,B的高程为Ha = 12.123 m , Hb=11. 123m,观测高差和线路长度为:图5-2S1=2km,S2=Ikm,S3=0.5krn,h1=-2.003m,h2=-1.005 m,h3=-0.501 m,求改正数条件方程和各段离差的平差值。
5.1.05 在图5-3的水准网中,A为已知点B、C、D为待定点,已知点高程HA=10.000m,观测了5条路线的高差:h1=1.628m,h2=0. 821 m,h3=0.715m,h4=1.502m,h5=-2.331 m。
各观测路线长度相等,试求:(1)改正数条件方程;(2)各段高差改正数及平差值。
5.1.06 有水准网如图5-4所示,其中A、B、C三点高程未知,现在其间进行了水准测量,测得高差及水准路线长度为h1=1 .335 m,S1=2 km;h2=1.055 m,S2=2 km;h3=-2.396 m,S3=3km。
试按条件平差法求各高差的平差值。
2.1.07如图 5-5 所示,L1=63°19′40″,=30″;L2=58°25′20″,=20″;L3=301°45′42″,=10″.(1)列出改正数条件方程;(2)试用条件平差法求∠C的平差值(注: ∠C是指内角)。
5-2条件方程5. 2.08 对某一平差问题,其条件方程的个数和形式是否惟一?5.2.09 列立条件方程时要注意哪些问题?如何使得一组条件方程彼此线性无关?5.2. 10 指出图5-6中各水准网条件方程的个数(水准网中P i表示待定高程点,h i表示观测高差)。
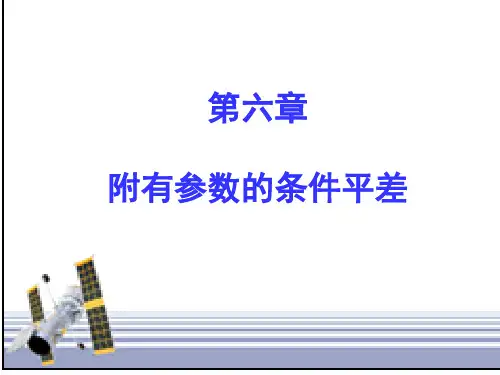
《测量平差》教案第六章 附有参数的条件平差一、概述设ABD X ∠=~,又可列出1个极条件和一个固定边条件极条件为(以A 点为极):()()()1~sin ~~sin ~~sin ~sin ~sin ~~sin 5869675=+-+L L L X L L X L L固定边条件为(由AC 边推算到AB 边):()XL L L L S S AC AB ~sin ~sin ~~sin ~sin 3862+= 或()1~sin ~sin ~~sin ~sin 3862=+XL S L L L S AB AC 由于选了一个参数,增加了一个条件,一般情况下,若选了u 个参数,则条件方程的数目为c=r+u.从以上5 个方程出发进行平差,就是附有参数的条件平差方法。
二、基础方程观测量L ~和X ~的最佳估值V L L +=ˆ,x X X ˆˆ0+=,用奇表示的附有参数的条件平差函数模型为()1,1,0ˆ,ˆr r X LF =——条件方程 或0ˆ1,1,,1,,=-+c u u c n n c W xB V A ——改正数条件方程(),X L F W -=——改正数条件方程常数项(闭合差)计算式 按求函数极值的拉格朗日乘数法,设其乘数为()Tr b a r k k k K =1,,称为联系数向量。
组成函数()W xB AV K PV V T T -+-=Φˆ2, 将Φ对V 和xˆ分别求一阶导数,并令其为零,导出改正数V 的计算公式 K QA K A P V T T ==-1——改正数方程附有参数的条件平差的基础方程为:0ˆ1,1,,1,,=-+c u u c n n c W xB V AK QA K A P V TT ==-1 0=K B T方程的个数与未知数的个数相同,方程有唯一解。
三、基础方程的解将改正数方程代入改正数条件方程,并令T T aa A AP AQA N 1-==,则得法方程0ˆ=-+W xB K N aa 0=K B T ——法方程秩()()()c A R AQA R N R T aa ===,即aa N 是个c 阶的满秩方阵,顾及B N B N aa T bb 1-=,由法方程可解出,ˆ11W N B N x aa T bb --= ()x B W N QA V aaT ˆ1-=-, 四、精度评定(一)、单位权方差估值计算u-c r ˆ20PVV PV V T T ==οPV V T 的计算:1、()权阵为对角阵时=2n 222211P P P n T V V V PV V +++2、K W xB K W K AV K PV K QA PV V TT T T T T T =-===ˆ)( 3、()xW N B W N W xB N W W N W K W PV V Taa T aa T aa T aa T T T ˆˆ1111-----=-== (二)、协因数阵设[]T TT T TTT L V K XW L Z ˆˆ=列出各分块向量解的表达式及其微分式,利用协因数传播律导出各量的协因数阵和各量之间的互协因数阵的结果列于相应表中证明:表中X X Q ˆˆ、VV Q 的计算表达式。