附有限制条件间接平差的虚拟观测算法
- 格式:pdf
- 大小:320.92 KB
- 文档页数:4


测绘中级工程师职称答辩题库以及数字化测图软件;2、确定数据的精度和准确度要求,选择合适的内业数据处理软件;3、选择合适的数据采集途径,如野外数字采集、原图数据采集、数字摄影测量等;4、考虑数据共享和管理的问题,建立完善的数据管理系统;5、注意数据安全和保密问题,加强数据备份和加密措施。
答:地面上等级控制点的平面坐标(x,y)是通过测量该点的水准高程和与已知控制点的水平距离来计算得出的。
其中主要理论包括高程测量理论和平面测量理论,技术包括水准测量技术和导线测量技术,方法包括三角测量法和交会测量法等。
这些控制点的坐标可以用于制作地图、规划建筑物和基础设施等工程项目,以及进行地质勘探和环境监测等应用。
和数据。
2)异:遥感技术可以获取更广阔的地理范围,可以获取更高分辨率的数据,同时可以获取多时相、多光谱、多角度的数据;而摄影测量技术则更加精确,可以获取更为详细的地形信息和三维几何信息。
优势:遥感技术可以快速获取大面积的数据,可以进行长时间序列的监测和分析,适用于大规模的地理信息获取和应用;摄影测量技术则适用于需要高精度的地图制图、工程测量等领域。
答:地图制作的方法有手工绘制、计算机辅助绘图和数字化制图。
手工绘制的基本过程是先进行地形测量,然后在纸张上绘制地图;计算机辅助绘图的基本过程是将地形数据输入计算机,利用绘图软件进行绘制;数字化制图的基本过程是将卫星遥感数据或其他数字数据输入计算机,利用地图制作软件进行绘制和编辑。
答:GIS是一种集成了空间分析、数据管理和地图制作等功能的软件,它不仅可以处理地图数据,还可以进行空间分析和决策支持。
而一般数字测图软件只能进行地图制作和简单的数据处理,缺乏空间分析和决策支持的能力。
另外,GIS还具有更强大的数据管理能力和可视化效果。
答:响隧道贯通的主要误差是隧道两端的偏差和高程误差。
在实际工作中,可以采取以下措施解决这个问题:1)严格控制隧道两端的偏差和高程误差,尽量减小误差;2)采用高精度仪器进行测量,提高测量精度;3)在隧道贯通前进行多次测量,对测量结果进行比对和分析,确保贯通的准确性;4)在贯通后进行检查和调整,及时纠正误差。
测量平差太原理工大学测绘科学与技术系第五章附有限制条件的条件平差附有限制条件的条件平差§5-1 基础方程和它的解§5-2 精度评定§5-3 各种平差方法的共性和特性§5-4 平差结果的统计性质§5-1 基础方程和它的解条件平差、附有参数的条件平差、间接平差、附有条件的间接平差等四种经典平差方法,除条件平差不增选参数外,其它三种方法都要增选数量不等的参数参与平差,其未知参数的个数分别是u<t,u=t,u>t,且要求参数间彼此独立,在u>t 的情况下,也要求必须包含t个独立参数,从函数模型上看,四种平差方法总共包含如下四类的方程:基础方程和它的解前三类方程中都含有观测量或同时含有观测量和未知参数,而最后一种方程则只含有未知参数而无观测量,为了便于区别起见,特将前三类方程统称为一般条件方程,而最后一类条件方程称为限制条件方程。
~0)~(0=+=A L A L F ,线性形式为:dX B L X F L +==~~)~(~,线性形式为:0~~0)~,~(0=++=A X B L A X L F ,线性形式为:0~0)~(0=+=ΦC X C X ,线性形式为:基础方程和它的解在第二章中介绍过附有条件的条件平差的模型建立方法,该方法也要增选u 个参数,方程的总数为r+u 个。
如果在u 个参数中有s 个是不独立的,或者说在这u 个参数中存在着s 个函数关系式,则建立平差模型时应列出s 个限制条件方程,除此之外再列出c=r+u-s 个一般条件方程,因此方程总数也可以认为是c+s 个,形成如下的函数模型若为线性形式,则为0)~,~(1=⨯X L F c 0)~(1=Φ⨯X S 0~~1011=++⨯⨯⨯⨯⨯c u u c n n c A X B L A 0~101=+⨯⨯⨯s u u s C X C基础方程和它的解无论线性模型还是非线性模型,按照第二章介绍的线性化方法和结论,并考虑到则可写出其线性化后的函数模型为以和的估值和代入上式,则∆+=L L ~x X X ~~0+=0~111=-+∆⨯⨯⨯⨯⨯c u u c n n c W x B A 0~11=-⨯⨯⨯s x u u s W x C ∆x ~V x ˆ0ˆ111=-+⨯⨯⨯⨯⨯c u u c n n c W x B V A 0ˆ11=-⨯⨯⨯s x u u s W xC基础方程和它的解式中以上式作为函数模型而进行的平差,称为附有限制条件的条件平差,有的文献也称其为概括平差函数模型。
第一章测试1.误差是不可避免的。
A:对B:错答案:A2.构成观测条件的要素有哪些A:外界条件B:计算工具C:观测者D:测量仪器答案:ACD3.对中误差属于那种误差A:系统误差B:偶然误差C:不是误差D:粗差答案:B第二章测试1.两随机变量的协方差等于0时,说明这两个随机变量A:相关B:互不相关C:相互独立答案:B2.观测量的数学期望就是它的真值A:错B:对答案:A3.衡量系统误差大小的指标为A:精确度B:准确度C:不确定度D:精度答案:B4.精度是指误差分布的密集或离散程度,即离散度的大小。
A:错B:对答案:B5.若两观测值的中误差相同,则它们的A:测量仪器相同B:真误差相同C:观测值相同D:精度相同答案:D第三章测试1.设L的权为1,则乘积4L的权P=()。
A:1/4B:4C:1/16D:16答案:C2.有一角度测20测回,得中误差±0.42秒,如果要使其中误差为±0.28秒,则还需增加的测回数N=()。
A:25B:45C:20D:5答案:A3.在水准测量中,设每站观测高差的中误差均为1cm,今要求从已知点推算待定点的高程中误差不大于5cm,问可以设25站。
A:对B:错答案:A4.已知距离AB=100m,丈量一次的权为2,丈量4次平均值的中误差为2cm,若以同样的精度丈量CD的距离16次,CD=400m,则两距离丈量结果的相对中误差分别为( 1/5000 )、(1/20000 )。
A:错B:对答案:B5.A:29B:35C:5D:25答案:D第四章测试1.当观测值为正态随机变量时,最小二乘估计可由最大似然估计导出。
A:对B:错答案:A2.多余观测产生的平差数学模型,都不可能直接获得唯一解。
A:对B:错答案:A3.在平差函数模型中,n、t、r、u、s、c等字母各代表什么量?它们之间有何关系?( n观测值的个数 )(t必要观测数 )(r多余观测数,r=n-t )(u所选参数的个数 )( s非独立参数的个数,s=u-t )( c所列方程的个数,c=r+u )A:对B:错答案:A4.A:对B:错答案:A5.A:错B:对答案:B第五章测试1.关于条件平差中条件方程的说法正确的是:A: 这r个条件方程应彼此线性无关B: 应列出r个条件方程C: r个线性无关的条件方程必定是唯一确定的,不可能有其它组合。

测量平差复习资料一、证明题
1、Z与W的协方差
(1)
2、告诉条件平差公式告诉(1)条件平差的公式;推论出Q VV 及Q LL
(2)间接平差
3、水准测量(1)按测站
(2)按路线
二、推导题
(1)
(2)
填空题
1、u = 0 条件平差;u = t 间接平差;u<t 附有参数的条件平差;u>t 附有限制条件的间接平差(注:t为必要观测,u为参数的个数)
2、正态分布参数μ、σ,μ确定了曲线中心位置,σ越小f(x)值越大曲线越陡峭。
3网中只有一个已知高程点称为自由网,其必要观测为网中水准点的总数减一。
符合水准网,网中已知高程点大于等于2个,其必要观测为网中待测水准点的个数。
(p69)
3、测量误差的种类主要平定那种误差
粗差、系统误差、偶然误差(主要平定的误差)
4、精度(p15)精确度(p19)
5、偶然误差的特性:有界性聚中性对称性、抵偿性
6、协方差p27
计算题
P67(例5-1) p99(例6-1) p109(例6-4)。
3。
四中经典平差模型的分析与设计在生产实践中观测的数据可以通过以最小二乘原理为基本原理进行平差提高测量精度,但由于所设参数个数与观测个数和非必要观测个数的关系不同,可以分为条件平差、附有参数的条件平差、间接平差、附有限制条件的间接平差四种。
通过对它们的分析,可以很好地解决生产实践中的实际问题,亦可为以后的某些理论推导作必要的准备。
3。
1条件平差模型条件平差的函数模型:A V+W=0其中A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n n n r r r b b b a a a 212121,W=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡r b a w w w ,V=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n v v v 21 随机模型:D=Q 20δ法方程:0=+W K N aa其中:T aa AQA N =解之得 K=W N aa 1-- 误差方程 : V=K QA T观测量平差值: V L L +=平差值函数:)(21n L L L f+++=ϕ 其权函数式为⎪⎪⎭⎫ ⎝⎛∂∂+++=i i n n Lff L d f L d f L d f d ,***2211ϕ 单位权方差的估值:rPVV r PV V T T ==020,δδ平差值函数ϕ的协因数阵:AQf N AQf Qf f Q aaT T 1)(--=ϕϕ 条件平差的基本向量的协因数和互协因数3。
2附有限制参数的条件平差模型在一个平差问题中,如果观测值个数为n ,必要观测数为t ,则多余观测数r=n —t.若不增选参数,只需列出r 个条件方程,这就是条件平差方法。
如果又选了u 个独立量为参数(0<u 〈t )参加平差计算,这就可建立含有参数的条件平差作为平差的函数模型,这就是附有参数的条件平差方法。
0**1,1,,1,,=++c u uc n nc W x B V A②式中,V 为观测值L 的改正数,1,u x为参数近似值0X 的改正值,即x X X V L L +=+=0,随机模型:D=12020-=P Q δδ为了求出能使min =PV V T的一组解,按求函数条件极值的方法,组成函数)(2W x B AV K PV V T T ++-=Φ式中,K 是对应于条件方程②的联系数向量,为求Φ的极小值,将其分别对V 和x求一阶导数并令其等于零,则有02022=-=∂Φ∂=-=∂Φ∂B K xA K P V VT T T由两式转置之后第一式左乘1-P ,再加②式得其基础方程解算此基础方程,通常是将其中的改正数方程代入条件方程,得到一组包含K 和1,,u x的对称线性方程组,即⎪⎭⎪⎬⎫==++00K B w x B K AQA T T令Ta a AQA N =,,上式也可写成:⎪⎭⎪⎬⎫==++00,K B W x B K N T a a③ 上式称为附有参数的的条件平差的法方程。
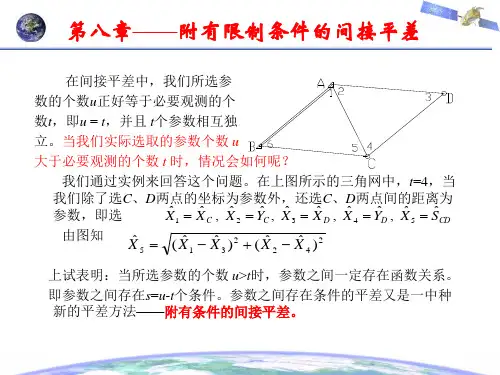
第八章 附有限制条件的间接平差知识点1、附有限制条件的间接平差法的概念依据几何模型,针对具体的平差问题,确定观测值个数n ,必要观测数t ,则多余观测数r=n-t 。
如果又选了u 个量为参数(而u>t 且包含t 个独立量)参加平差计算,则u 中存在s 个限制条件式,则根据几何模型中的几何关系,将n 个观测值的平差值利用所选u 个参数表示出来,列出s 个函数式,共可列出n+s 个函数式,即为附有参数的条件平差的函数模型。
然后转换为误差方程的形式⎭⎬⎫=+-=0ˆˆx W x C l xB V ,然后按求自由极值的方法,解出使V T PV=min 的V 、xˆ,最后计算出X ˆ,L ˆ; 2、公式汇编函数模型和随机模型⎪⎭⎪⎬⎫=Φ+=0)ˆ(ˆˆX d X B L ,转化后⎭⎬⎫=+-=0ˆˆx W xC l x B V ,12020-==P Q D σσ其中 )(0X F L l -=,)(0X W x Φ= 。
法方程⎭⎬⎫=+=-+0ˆ0ˆx s T BB W x C W K C xN式中PB B N T BB =,Pl B W T= 。
其解x CC T BB X X x CC T BB BB CC T BB BB W N C N W Q W N C N W CN N C N N x 11ˆˆ111111)(ˆ---------=--=)(11x BB CC s W W CN N K +=--式中TBB CC C CN N 1-= 。
观测值和参数的平差值x X Xˆˆ0+=,V L L +=ˆ单位权方差的估值su n PVV T +-=20ˆσPV V T 的计算:(1)PV l PV B x PV V T T T -=ˆ;(2)x PB l Pl l PV V TT T ˆ-=;参数平差值函数)ˆ(ˆX Φ=ϕ平差值函数的权函数式 x F X d F d T T ˆˆˆ==ϕ协因数: F Q F Q X XT ˆˆˆˆ=ϕϕ;方差:ϕϕϕϕσˆˆ20ˆˆQ D =; 3、按附有限制条件按的间接平差求平差值的计算步骤:(1)确定n 、t ,选u (u>t 且包含t 个独立量)个量为参数参与平差;得出s 个参数是相关的(2)列出n+s 个方程,即先将n 个观测值的平差值利用所选参数表示出来,再列出s 个函数式:即先列出平差值形式,再转化为误差方程形式,最后矩阵形式⎭⎬⎫=+-=0ˆˆx W xC l xB V ;(3)确定权阵P ;(4)依据以下公式计算,PB B N T BB =,Pl B W T=,TBB CC C CN N 1-=,x CC T BB BB CC T BB BB W N C N W CN N C N N x 111111)(ˆ--------=,x X Xˆˆ0+=,V L L +=ˆ;(5)检核;(6)精度评定。