感应电机矢量控制系统的仿真
- 格式:doc
- 大小:676.00 KB
- 文档页数:9
感应电动机转差型矢量控制系统的设计1 引言感应电动机具有结构简单、坚固耐用、转速高、容量大、运行可靠等优点。
但是,由于感应电动机是一个高阶、非线性、强耦合的多变量系统,磁通和转矩耦合在一起,不能像直流电动机那样,磁通和转矩可以分别控制。
所以,一直到20世纪80年代都没有获得高性能的感应电动机调速系统。
近年来,随着电力电子技术、现代控制理论等相关技术的发展,使得感应电动机在可调传动中获得了越来越广泛的应用。
矢量控制策略的提出,更是实现了磁通和转矩的解耦控制,其控制效果可媲美直流电动机。
本文在分析感应电动机矢量控制原理的基础上,基于matlab/simulink建立了感应电动机转差型矢量控制系统仿真模型,仿真结果证明了该模型的合理性。
并在此基础上进行系统的软、硬件设计,通过实验验证控制策略的正确性。
2 矢量控制的基本原理长期以来,直流电动机具有很好的运行特性和控制特性,通过调节励磁电流和电枢电流可以很容易的实现对转矩的控制。
因为它的转矩在主磁极励磁磁通保持恒定的情况下与电枢电流成线性关系,所以通过电枢电流环作用就可以快速而准确地实现转矩控制,不仅使系统具有良好稳态性能,又具有良好的动态性能。
但是,由于换向器和电刷的原因,直流电动机有它固有的缺点,如制造复杂,成本高,需要定期维修,运行速度受到限制,难以在有防腐防暴特殊要求的场合下应用等等。
矢量控制的设计思想是模拟直流电动机的控制特点进行交流电动机控制。
基于交流电动机动态模型,通过矢量坐标变换和转子磁链定向,得到等效直流电动机的数学模型,使交流电动机的动态模型简化,并实现磁链和转矩的解耦。
然后按照直流电动机模型设计控制系统,可以实现优良的静、动态性能。
转子磁链ψr仅由定子电流励磁电流ism产生,与定子电流转矩分量ist无关,而电磁转矩te正比于转子磁链和定子电流转矩分量的乘积,这充分说明了感应电动机矢量控制系统按转子磁链定向可以实现磁通和转矩的完全解耦。
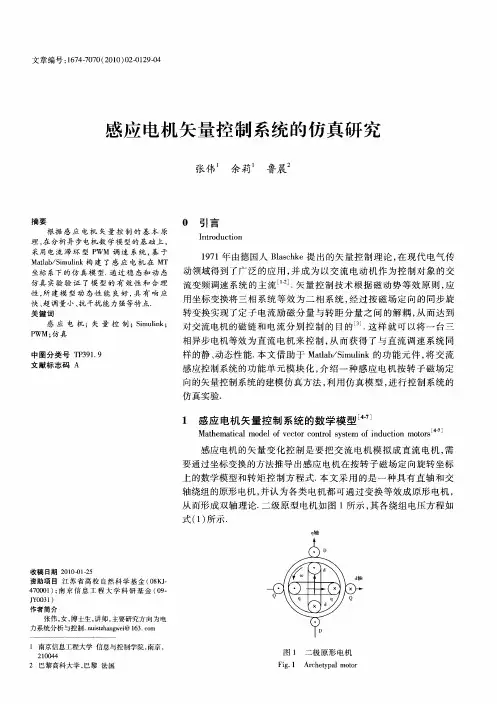
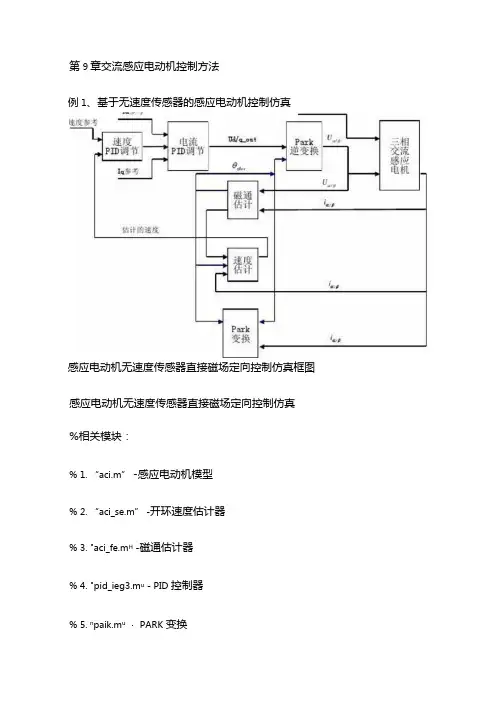
第9章交流感应电动机控制方法例1、基于无速度传感器的感应电动机控制仿真感应电动机无速度传感器直接磁场定向控制仿真框图感应电动机无速度传感器直接磁场定向控制仿真%相关模块:% 1. “aci.m” -感应电动机模型% 2. “aci_se.m” -开环速度估计器% 3. "aci_fe.m H -磁通估计器% 4. "pid_ieg3.m u - PID 控制器% 5. n paik.m u・ PARK 变换% 9.u inv_paik.m H - PARK 逆变换% 7. n ianip^en.m n・谐波生成器T = 5e-04; %仿真模型的采样时间(秒****************************** 真******************************phasel_inc_build = 0; %磁通/速度估计测试(ACLFE/ACLSEphase2_inc_build = 1; % 闭环调速测试****************************** 真************************************************************ **************************Rs = 1.723; % 定子阻抗(ohm1Ri = 2.011; % 转子阻抗(ohmLs = (7.387十159.232*le-03; % 定子电感(HLi = (9.732十159.232*匕-03; % 转子电感(HLm= 159.232*le-03; % 励磁电感(HP = 4;%磁极数J = 0.001; %转子转动惯量(kg.m A2B = 0.0001; % 阻尼系数(N.m.sec/iadTl = 0;%负载扭矩(N.mnp = P/2; %磁极对数****************************************************************************************** 系****************************** Wb = 2*pi*fb;Ib = 5;%Lb = 220*sqrt (2/3/(2*pi*60;Lb = Lm*Ib;Tb = (3*Vb*Ib/2*(np/(2*pi*60;SPb= 120*fb/P;******************************女台彳z ****************************** X = [0;0;0;0]; % X = [psi_iq; psi_fd; i_sq; i_sd]W1 = O;%转子电角速度(md/secIq = O;Id = O;fb = 60;%感应电动机%感应电动机的矢量参数p_un = [T; Rs; Ri; Ls; Li; Lm; np; J; B; Tl/Tb; Wb; lb; Vb; Lb; Tb]; %磁通估计器li.fe = [0; 0; 0; 0; 0; 0; 0; 0];% [tlieta_psi_r; psi」D_i; psi_sd_v; % psi_sq_v; ui_sd; ui_sq; e_sd; e_sq] % 转子励磁角度(pi】% [T; Rs; Ri; Ls; Lr; Lm; Kp; Ti; lb; Vb] tlieta_psi_r = 0;%开环速度估计器li_se = [0;0]; % [theta_i_.se; wi_psi_i] p_se = [T; Ri; Li; Lm; 200; 0.97; 0.03; fb];% [T; Ri; Li; Lm; fc; difLmaxJuiut; difLnuiiJunit; fb]wi_liat_se = 0;% PID・IQ控制器%供电频率(Hz %电角速度(iad/sec %相电流Qmp %磁链(volt.sec/iad %磁链(volt.sec/iad % 扭矩(N.m %同步速度(rpm Vb = 320/sqit⑶ %相电压(volt ****************************** 系统参数****************************** p_fe = [T; Rs; Ri; Ls; Li; Lm; 0.055; le-06; lb;Vb];h_iq = [0;0;0]; % li.pid = [up_ieg3; ui_ieg3; i】d_ieg3]p_iq= [T; 2*Ib/Vb; 0.001; 0.0001; 0.1; 0.71; -0.71]; % [T; Kp; Ti; Td; Kc; Umax; Umm];% PID・ID控制器li_id = [0;0;0]; % h_pid = [up_ieg3; ui_ieg3; i】d_ieg3]p_id = [T; 2*Ib/Vb; 0.001; 0.0001; 0.1; 0.71; -0.71]; % [T; Kp; Ti; Td; Kc; Umax; Umm];%PID -速度控制h_sp = [0;0;0]; % h_pid = [up_ieg3; ui_ieg3; ud_ieg3]p_sp = [T; 0.00334*SPb/Ib; 0.01; 0.0001; 0.9; 1; -1]; % [T; Kp; Ti; Td; Kc; Umax; Umm];******************************女台彳E ************************************************************ 貢,入、%Tt = 29*T; % 仿真时间(sect = 0:T:Tt; %仿真时间设置(secspeed_ief = 900/SPb; % 参考速度(puId_ref = 2/Ib; %旋转坐标同步参考d 轴电流(puIq_ief = 0/Ib; %旋转坐标同步参考q 轴电流(pu***************************** ^^貢********************************************************** 貢****************************** if phase 1 _inc_build==l% Phase 1 inciemental build**************************Tt = 0.5120; % 仿真时间(secfor i = 1 :length(t.[rmp_out] = faiiip_gen(2*pi/(2*pi,0,speed_ief*fbj(i;[Uq_iefYh_iq] = pid」eg3(Iq_iefJq,li_iq,p_iq;[Ud_ref,Y,h_id] = pid_i eg3 (Id_i ef,Id ,li_id ,p_id;[uq_iefud_ref] = inv_paik(Uq_ief,Ud_iefimp_out;[Te.Wi\X] = aci(Wi\X,[uq_ief; ud_ief].p[IqJd] = paik(X(3,X(4,nnp_out;[psi_iq.psLidjheta_psi_i;h_fe] = aci_fe(X(3 ,X(4jiq_ief,ud_iefJi_fe,p_fe; [wrjiat_seji_se] = aci_se(X(3 ,X(4,psi_iq,psi_i d」hes_psi_「h_se,p_se; 3imp(i = imp.out;elseif phase2」nc_bi】ild==l% Phase 2 inciemental build%[Iq_ief,Y,li_sp] = pid_i eg3 (speed」efW「h_sp,p_sp;[Iq_ief,Y,h_sp] = pid_ieg3 (speed」ef>u_hat_se,li_sp,p_sp;[Uq_iefYh_iq] = pid」eg3(Iq_iefJq,li_iq,p_iq;[Ud_ref,Y,h_id] = pid_i eg3 (Id_i ef,Id ,li_id ,p_id;[uq_iefud_ref] = inv_paik(Uq_ief^Ud_ieftlieta_psi_f;[Te.Wi\X] = aci(Wi\X,[uq_ief; ud_ief].p[psi_iq.psLidjheta_psi_i;h_fe] = aci_fe(X(3 ,X(4jiq_ief,ud_iefJi_fe,p_fe; [wi_hat_se,h_se] = aci_se(X(3 ,X(4,psi_iq,psi_i d、theta_psi_i ,h_se,p_se; [IqJd] = paik(X(3 ,X(4 jheta_psi_r;endi_qe(i = Iq;i_de(i = Id;v_qe(i = Uq_ief;v_de(i = Ud_ief;ibeta(i = X(3;ialfa(i = X(4;vbeta(i = i】q_ief;valfa(i = iid_ief;psi_i_beta(i = X(l;psi 丄alfa(i = X(2;psi_i_beta_hat(i = psi_iq;psi_i_alfajiat(i = psi_id;theta_i(i = tlieta_psLr;toique(i = Te;wi(i = Wi;wi_hat(i = wr_liat_se; %带速度传感器%无速度传感器4t(lend****************************** 貢*************************************************************** 貢*********************************************************** 康应电动机模型****************************ftinction [Te,Wi,X] = aci(WiO,XO,U,p%该函数仿真定子参考坐标系下感应电动机的动态相应%输入参数:% W10 =转子电角速度(rad/sec% X0 = [psi_rq; psi_rd; i_sq; i_sd]% U = [v_sq; v_sd]=定子相电压(volt% p = [T; Rs; Ri; Ls; Lr; Lni; np; J; B; Tl; Wb; lb; Vb; Lb; Tb]% 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 % 输出参数:%Te =电磁转矩(N.m% Wi =转子电角速度(rad/sec% X = [psi_iq; psi_id; i_sq; i_sd]%其中% psi_rq =静止参考坐标q-轴转子磁链(flux luikage volt.sec/rad % psi_rd =静止参考坐标d-轴转子磁链(flux luikage volt.sec/rad % i_sq =静止参考坐标q-轴定子电流(amp% i_sd =静止参考坐标d-轴定子电流(amp% v_sq =静止参考坐标q-轴定子电压(voll% v_sd =静止参考坐标d-轴定子电压(voll%T =采样周期(sec% Rs =定子阻抗(olun% Ri =转子阻抗(ohm%Ls =定子自感(H%"=转子自感(H%Lm =励磁电感(H% np =磁极对数% J =转子转动惯量(kg.m人2% B =阻尼系数(N.m.sec/rad - always ignored %丁1 =负载转矩(川11% Wb =电磁角速度(rad/sec% lb =相电流(amp%Vb =相电压(volt% Lb =磁链系数(volt.sec/rad%Tb =转矩(N.m5%根据电动机参数定义的常数sig = l-p(6A2/(p(4*p(5; % sig = l-Lm A2/(Ls*Li gam = (p(6A2*p(3+p(5A2*p(2/(sig*p(4*p(5A2; alp = p(3/p(5;Ti = p(5/p ⑶bet = p(6/(sig*p(4*p(5;%常数定义KI =p(l*alp;K2=p(l*p(ll;K3 = p(l*alp*p(6*p(12/p(14;K4 = p(l*alp*bet*p(14/p(12;K5 = p(l*bet*p(14*p(l l/p(12;K6 = p(l*gam;K7 = p(l*(l/(sig*p(4*(p(13/p(12;K8 = 1.5*p(7*(p(6/p(5*(p(14*p(12/p(15; K9 = p(l*p(9/p(8;K10 = p(l *p(7*(l/p(8*(p( 15/p( 11;%转子磁通/定子电流计算/alpha = O.O1;%变量定义psi_i_beta = XO(1;psi_i_alfa = X0(2;ibeta = X0(3;ialfa = X0(4;ubeta = U(1;ualfa = U(2;wi = WiO;load^toique = p(10;% Predictorpsi_i_beta_p = psi_i_beta - Kl*psi_i_beta + K2*wr*psi_i_alfa 十K3*ibeta; psi_i_alfa_p = psi_i_alfa - Kl*psi_i_alfa - K2*wi *psLi_beta 十K3*ialfa; ibeta_p = ibeta + K4*psi_i_beta - K5*wr*psi_i_alfa - K6*ibeta 十K7*ubeta; ialfa_p = ialfa 十K4*psi_i_alfa +K5*wi*psi_i_beta - K6*ialfa + K7*ualfa; % Conectordpsi_i_beta_p = - KI *psi_i_beta_p 十K2*wi*psi_i_alfa_p 十K3*ibeta_p;dpsi_i_alfh_p = - Kl*psi_i_alfa_p - K2*wi*psi_r_beta_p 十K3*ialfa_p;dibeta_p = K4*psi_i_beta_p - K5*wr*psi_i_alfa_p - K6*ibeta_p + K7*ubeta;dialfa_p = K4*psi_i_alfa_p 十K5*wi*psi__i_beta_p - K6*ialfa_p 十K7*ualfa; % alp =Ri.Lr (depending oil Ri % Ti = L1/R1;转子时间常数 % bet = Lni/(sig*Ls*Li % gam =(LiM2*Ri+LiA2*Rs/(sig*Ls*L"26%dpsi_i_beta = - Kl*psi_r_beta + K2*wi*psi_i_alfa 十K3*ibeta;%dpsi_i_alfa = - Kl*psi_i_alfa - K2*wi*psi_i_beta 十K3*ialfa;%dibeta = K4*psi_i_beta - K5*wi*psi_r_alfa - K6*ibeta + K7*ubeta;%dialfa = K4*psi_i_alfa 十K5*wi*psi_i_beta - K6*ialfa 十K7*ualfa;dpsi丄beta = psi_i_beta_p - psi_i_beta;dpsi_i_alfh = psi_i_alfa_p - psi_i_alfa;dibeta = ibeta_p - ibeta;dialfa = ialfa_p - lalfa;psi_i_beta = psi_i_beta 十O.5*((l+alplia*dpsi_i_beta_p 十(1 -alpha*dpsi_i_beta; psi_r_alfa = psi_i_alfa 十0.5*((l十alpha*dpsi_i_alfa_p 十(1 -alpha*dpsi_i_alfa;ibeta = ibeta + 0.5 * ((1 +alplia * dibeta^p + (l-alplia*dibeta;lalfa = lalfa 十0.5*((1 +alplia*dialfa_p 十(l-alplia*dialfa;%电磁转据计算torque = K8*(psi_r_alfa*ibeta - psi_r_beta*ialfa;%转子速度计算*/wi_p = wi - K9*wi + K10*(toique - load_toique; dwi_p = - K9*wi_p 十K10*(torque - load_toique;%dwi = - K9*wi 十K10*(toique ・ load_toique; dwr = wi_p - wr;wi = wr 十0.5 *((1 +alpha*dwi_p 十(1-alpha*dwr;%返回结果X(1 = psi_i_beta;X(2 = psi丄alfa;X(3 = ibeta;X(4 = ialfa;Wi = wr;Te = torque;********************************磁通估计函数**************************** fimctioii [psi_iq,psi_id、theta_psi_i;h_out]=aci_E(i_sq,i_sd,u_sq,u_sd」i_in、p%该函数估计感应电动机的转子磁通和角度%输入]% i_sq =静止参考坐标q-轴定子电流(amp7% i_sd =静止参考坐标d-轴定子电流(amp% u_sq =静止参考坐标q-轴定子电压(voli% u_sd =静止参考坐标d-轴定子电压(voli% h_in = [tlieta_psi_i_piev; psi_rD_i_piev; psi_sd_v_piev; psi_sq_v_piev; % ui_sd_piev; ui_sq_piev; e_sd_piev; e_sq_prev]%p%输出:% psi_iq% psi_id% h_out%其中:%T% Rs%Ri%Ls%Li%Lm%Kp% Ti =采样周期(sec =定子阻抗(olun =转子阻抗(ohm =定子自感(H =转子自感(H =励磁电感(H =比例增益=积分时间和复位事件(sec=以前和现在转子磁通角(md=以前和现在转子磁通(volt.sec=以前和现在定子磁通(volt.sec=以前和现在转子磁通(volt.sec=以前和现在积分电压(voli=以前和现在积分电压(VO1T=以前和现在反电动势enif (volt=以前和现在反电动势enif (volt =静止参考坐标q-轴转子磁链(flux luikage volt.sec/iad =静止参考坐标d-轴转子磁链(flux linkage volt.sec/rad =同步转子磁通角0-2*pi (rad = [theta_psi_i_cun; psi_iD_i_cuiT; psi_sd_v_cun; psi_sq_v_cinr; = [T; Rs; Ri; Ls; Li; Lm; Kp; Ti; lb; Vb] % theta_psi_r % ui_sd_cun; ui_sq_cun; e_sd_cuir; e_sq_cun] %theta_psi_r_piev,theta_psi_i_cun % psi_iD_i_piev,psi_rD_i_cun % psi_sd_v_piev,psi_sd_v_cun % psi_sq_v_pfev,psi_sq_v_cun % ui_sd_piev,ui_sd_cun % ui_sq_pi ev,ui_sq_cui 1 %e_sd_piev,e_sd_cun % e_sq_prev,e_sq_cuir%根据电动机参数定义常数Ti = p(5/p(3; % Ti = Li/Ri%常数定义Kl_fe = Ti/(Ti+p(l;K2_fe = p(l/(Tr+p(l;K3_fe = p(6/p(5;K4_fe = (p(4*p(5-p(6*p(6/(p(5*p(6; K5_fe = p(9*p(2/p(10;K6_fe = p(10*p(l/(p(6*p(9;K7_fe = p(5/p(6;K8_fe = (p(4*p(5-p(6*p(6/(p(6*p(6; %变量定义8i_qs_fe = i_sq;i_ds_fb = i_sd;u_qs_fe = u_sq;u_ds_fe = u_sd;theta_i_fe = h_in(l;flx_di_e = li_in(2;psi_ds_fe = h_in(3;psi_qs_fe = h_in(4;ui_ds = h_in(5;ui_qs = h_in(6;emflds = li_in(7;emflqs = li_in(8;Kp_fe = p(7;Ki_fe = p(8/p(l;%根据检测的定子电流进行Paik变换theta_e = 2*pi*theta_i_fe;i_ds_e = Lqs_fe*sm(theta_e+i_ds_fe*cos(tlieta_e; %估计模型flx_di_e = Kl_fe*flx_di_e ・ K2_fe*i_ds_e;%逆Park变换flx_di_s = flx_di_e*cos(tlieta_e;flx_qi_s = flx_di_e* sin(theta_e;%根据当前建立的模型计算钉子磁通flx_ds_s = K3_fe*flx_di_s + K4_fe*i_ds_fe;flx_qs_s = K3_fe*flx_qi_s + K4_fe*i_qs_fe;%转换PI控制器enoi = psi_ds_fe - flx_ds_s;ucomp_ds = Kp_fe*enoi + ui_ds;ui_ds = Kp_fe*Ki_fe*enor 十ui_ds;eiioi = psi_qs_fe ・ flx_qs_s;ucomp.qs = Kp_fe*eiioi 十ui_qs;ui_qs = Kp_fe*Ki_fe*enor 十ui_qs;%根据定子上的反电动势估计定子磁通emflold = emflds;emf ds = u ds fe - ucomp ds ・ K5 fe*i ds fe;psi_ds_fe = psi_ds_fe 十K6_fe*(0.5*(emf.ds 十eniLold; 9emflold = emflqs;emflqs = u_qs_fe - ucomp_qs ・ K5_fb*i_qs_fe;psi_qs_fe = psi_qs_fe 十K6_fe*(0.5*(emfLqs 十eniLold; %根据定子上的反电动势估计转子磁通psi di fe = K7 fe*psi ds fe - K8 fe*i ds fe;psi_qi_fe = K7_fe*psi_qs_fe - K8_fe*i_qs_fe;%计算转子磁通角theta_i_fe = iem(2*pi+ataii2(psLqi_fe,psi_di_fe,2*pi/(2*pi; %重新命名变量psi_id = psi_di_fe;psi.iq = psi_qi_fe;%刷新数据li_out = [tlieta^fe; flx_di_e; psi_ds_fb; psi_qs_fe; ui_ds; ui_qs; eniflds; emflqs];******************************** fiinction [wi jiat_se,li_out]= aci_se(i_sqd_sd,psi_iq,psi_id 、dieS_psi_i;h_iihp %利用该函数估计转子速度%%输入]% i_sq% i_sd% psi_iq% psi_id%h_in%p%输出:% wi_liat_se% h_out速度估计函数****************************%其中%T=采样周期(sec =转子阻抗(olun =转子自感阻抗(H =励磁电感(H =低通滤波的截至频率(Hz %Ri % Li % Lm %fc =估计的转子电角速度(rad/sec = [theta_psi_i_cun; We_cun] = Stationaiy q-axis stator cuiient (amp = Stationaiy d-axis stator cuiient (amp = Stationaiy q-axis rotor flux linkage (volt.sec/iad = Stationaiy d-axis lotoi flux luikage (vol匚sec/iad = SviiclHonously rotatuig lotoi flux angle (lad = [theta_psi_r_prev; We_piev] = [T; Ri; Li; Lm; fc; diff_max_limit; difLminJuiut; fb] % tlieta_psi_r% diff_max_limit =最大差分限度(%% =最小差分限度(%% theta_psi_i_pievjheta_psi_i_cun =过去和当前的转子磁通角(iad 10% We_piev,We_cun =过去和当前估计的同步角速度(rad/sec%根据电动机参数计算常数Ti = p(3/p (2;%Ti = Li,Ri%计算低通滤波时间常数tc = l/(2*pi*p(5; % Tc = l/(2*pi*fc (secWb = 2*pi*p(8;%常数定义Kl_se = l/(Wb*Tr;K2_se = l/(p(8*p(l;K3_se = tc/(tc+p(l;K4_se = p(l/(tc+p(l;%变量定义i_qs_se = i_sq;i_ds_se = i_sd;psi_qi_se = psi_iq;psi_di_se = psi_id;theta 丄se = theta_psi_r;theta 丄old = li_ui(l;wi_psi_i = h_in(2;%谐波计算psi_i_2 = psi_di_se*psi_di_se 十psi_qi_se*psi_qi_se;w_slip = Kl_se*(psi_di_se*i_qs_se - psi_qi_se*i_ds_se/psi_i_2; %同步速度计算if ((theta_i_se < p(6&(rhes_i_se > p(7w_syn = K2_se * (theta_i_.se-tlieta_i_old;else w_svn = wi_psi_r;%低通滤波器wi_psi_i = K3_se*wi_psi_j 十K4_se*w_syn; theta 丄old = dies 丄se; wi_hat_se = w_svii - w_slip;if (wi_liat_se > 1wi_hat_se = 1;elseif (wi_hat_se < -111wi_hat_se = -1;end%返回结果li_out = [tlieta^se; wi_psi_i];******************************** Pauk Pauk 变****************************fiinction [1Q4D] = paik(iqad,ang%iq% id% ang%1D1Q = -id*sni(2*pi*ang+iq*cos(2*pi*ang;1D = id*cos(2*pi*ang+iq*sin(2*pi*ang; fiinction [lqjd] = niv_paik(iQ4D,anglq = iD*siii(2*pi*ang+iQ*cos(2*pi*ang;id = iD*cos(2*pi*ang-iQ*siii(2*pi*ang;******************************** 产牛函************************fiinction [out] = ramp_gen(gaiii,offset,fieq,time %产生斜波信号%输入]% gain% freq% time%输出]% outT_ramp = l/abs(fieq; % 斜波信号周期(sectime_imp = iem(tmie,T_iamp; % 计算输出时间(sec if fieq > 0elseend % ramp fiom 0 to 1 如果fieq > 0 (for gain=l, offset=0 % lamp fiom 1 to 0 如果fieq < 0 (for gain=l, offset=0 out = gain*( 1/T_ranip*tune_niip 十offset; out = gain*(- (1 /T_i amp * tune_i mp+1 + offset;=斜波信号=输出增益=输出偏移量=频率(Hz = 时间(sec % offset =静止参考坐标q-轴定子变量=静止参考坐标d-轴定子变量=同步旋转参考坐标角度=同步旋转参考坐标q-轴定子变量=同步旋转参考坐标d-轴定子变量******************************** PID 扌牢制|函数^****************************fiinctioii [pid_out_ieg3,YJi_out] = pid_ieg3(pid_ieflieg3,pid_fdb_ieg3,h_in、p% PID控制器%输入]% pid_ief_reg3 = Reference signal% pid_fdb_reg3 = Feedback signal% h_in = [up_ieg3; ui_ieg3; ud_ieg3]% p = [T; Kp; Ti; Td; Kc; Umax; Umin]% 1 2 3 4 5 6 7%输出]% pid_out_ieg3 = Output signal% h_out = [iip_ieg3; ui_ieg3; ud_ieg3]%Y = e_ieg3; upisat_ieg3; saten_reg3; iip_ieg3; ui_reg3; ud_reg3] %其中% T = Sampling period (sec% Kp = Piopoilional gain% Ti = Litegial (reset tune (sec% Td = Deiivative time (sec% Kc = Integral collection gain% Umax = Maximum limit of output% Uniiii = Muimiuni linut of output% e_ieg3 = Eiioi% upisat__ieg3 = Pie-satuiated output% saten_ieg3 = Saturated difference% up_ieg3 = Propoitional output% ui_ieg3 = Integral output% iid」eg3 = Derivative output%定义PED常数Kp_ieg3 = p(2;Ki_ieg3 = p(l/p(3;Kd_ieg3 =p(4/p(l;Kc_reg3 = p(5;%定义变量pid_out_max = p(6;pid_out_min = p(7;upl_ieg3 =h_in(l;ui_reg3 = li_in(2;ud_ieg3 = h_in(3;13e_ieg3=pid_ief.reg3 - pid_fdb_ieg3; = Kp_ieg3*e_ieg3;=up_ieg3 + ui_ieg3 + ud_ieg3; up_reg3 upisat_ieg3 if (upisat_ieg3 > pid_out_maxpid_out_ieg3pid_out_ieg3elsepid_out_ieg3endsaten_ieg3ui_ieg3ud_ieg3h_out = [up_reg3; ui_ieg3; ud_ieg3];%返回计算结果Y = [e_ieg3; upisat_reg3; saten_ieg3; up_reg3; ui_reg3; ud_ieg3];=Kd_reg3 *(up_reg3 - upl_reg3; = ui_ieg3 十Ki_ieg3*up_reg3 十Kc_reg3 *saten_ieg3;=pid_out_reg3 - upisat_reg3; = uprsat_reg3; = pid_out_max; = pid_out_niui; elseif (uprsat_ieg3 < pid_out_min例2、无速度传感器的感应电动机控制实现======文件名称:ACI3_4.C功能描述:无速度传感器直接磁场定向控制三相交流感应电动机=================*/#include ',..\..\..\..\dniclib\cIQmatli\uiclude\IQmatliLib.h" /* 包含Iqmath 库的头文件*/ #include ',..\..\..\..\divlib\include\DSP28_Device.h n#include "aci3_4.li"#include "paiameter.li"#include "build.h”〃函数声明liitemipt void EvaTimei l(void;〃全局变量定义float Vd_testing = 0.25;float Vq_testing = 0;14 /* Vd (pu */ /* Vq (pi】*/float Id_ref = 0.35; /* Id 参考(pu */float Iq_ref = 0.05; /* Iq 参考(pu */float speed_ref = 0.5; /* 速度参考(pu */float T = 0.001/ISR_FREQUENCY; /* 采样周期(sec,参见paiametei.li */ mt i=0; mt pwmdac_clil=0;mt pwmdac_cli2=0;mt pwmdac_cli3=0;mt enable_flg=0;mt speedjoop_ps = 10;//速度环预定标器mt speed_loop_count = 1; // 速度环计数器ACIFE fel = ACIFE_DEFAULTS;ACISE sei = ACISE_DEFAULTS;CLARKE claikel = CLARKE_DEFAULTS; PARK paikl = PARK.DEFAULTS;IPARK lparkl = IP ARK_DEF AULTS;PIDREG3 pidl_id = PIDREG3_DEFAULTS;PIDREG3 pidl_iq = PIDREG3_DEFAULTS;PIDREG3 pidl_spd = PIDREG3_DEFAULTS;PWMGEN pwml = PWMGEN_DEF AULTS;PWMDAC pwmdacl = PWMDAC_DEFAULTS;DATALOG dlogl = DATALOG_DEFAULTS;SVGENDQ svgen_dql = SVGENDQ_DEFAULTS;CAPTURE capl = CAPTURE_DEFAULTS;SPEED_MEAS_CAP speed 1 = SPEED_MEAS_CAP_DEFAULTS; DRIVE drvl = DRIVE_DEFAULTS;RMPCNTL rcl = RMPCNTL_DEF AULTS;RAMPGEN lgl = RAMPGEN_DEFAULTS;PHASEVOLTAGE voltl = PHASEVOLTAGE_DEFAULTS;ILEG2DCBUSMEAS ilg2_vdcl = ILEG2DCBUSMEAS_DEFAULTS;ACIFE_CONST fel_const = ACIFE_CONST_DEFAULTS;15ACISE CONST sei const = ACISE CONST DEFAULTS;void maui(void { 15〃系统初始化//在DSP28_SysCul.c文件中包含初始化代码〃禁止CPU所有中断DINT; IER = 0x0000; IFR = 0x0000; LntPieCtil(; IiiitPieVectTable(;ImtSysCtil(;//初始化Pie控制寄存器〃初始化PIE中断向量表〃应用特定的函数,重新分配中断向量表,使能中断〃初始化EVA定时器1 // 配置Tuner 1 控制寄存器(EV A EvaRegs.GPTCONA.all = 0; // 使能中断EvaRegs.EV AIMRA.bit.TlUFINT = 1; EvaRegs.EV AIFRA.bit.TlUFINT = 1;//重新分配ISRs.//为T1PINT和T3PTINT重新分配PIE中断向量:// 为T1UFINT 使能PIE 组2 的中断PieCtrl.PIEIER2.all = M_INT6;// 为T1UFINT 使能CPU INT2〃使能全局中断和更高优先级的实时调试事件/*初始化模块*/pwml.n_penod = SYSTEM_FREQUENCY* 1000000*172; /* 预定标XI (T1,ISR 周ffi=Tx 1 */pwmdac 1 .pwmdac_penod = 2500; /* PWM 频率=30 kHz */p wml .imt(&pwml;EINT; //使能全局中断INTM ERTM;〃使能全局实时中断DBGMIER |= M_INT2; EALLOW; EDIS;PieVectTable.TlUFINT = & EvaTmieil;16pwmdac 1 .PWM_DAC_IPTRO = &pwmdac_chl; pwmdacl・PWM_DAC_IPTRl = & pwmdac_ch2; pwmdac l.PWM_DAC_IPTR2 = & pwmdac_ch3;pwmdac 1 .imt(&pwmdac 1;capl.imt(&capl;divl.imt(&drvl;ilg2_vdc 1 .init(&ilg2_vdc 1;/* 初始化DA TALOG 模块 */ dlogl.dlog_iptil = &clarke 1.as; dlogl.dlog_iptr2 = & clarke l.bs;/* 初始化SPEED_PR 模块(X128-T2, 50MHz, 25-teeth sprocket */speed l.ipm_max = 120*BASE_FREQ/P;speed 1 .speed_scalei =60*(SYSTEM_FREQUENCY*1000000/(128*25*speedl.ipm_max;/*初始化RAMPGEN模块*/lgl .step_angle_max = _IQ(BASE_FREQ*T;/* 初始化ACLFE 模块 */ fel_const.Rs = RS; fel_const.Ri = RR; fel^const.Ls = LS; fel_const.Lr = LR; fel_const.Lni = LM;fel_const.Ib = BASE_CURRENT; fel_const.Vb = BASE_VOLTAGE;fel_const.Ts = T;fel_const.calc(&fel_coiist;fel.Kl_fe = _IQ(fel_const.Kl; fel.K2_fe = _IQ(fel_const.K2; fel.K3_fe =_IQ(fel_const・K3; fel.K4_fe = _IQ(fel_const.K4; fel.K5_fe = JQ(fel_const.K5; fel.K6_fe =_IQ(fel_const・K6; fel.K7_fe = JQ(fel_const.K7;fel.K8_fe = _IQ(fel_const.K& fel.Kp_fe = _IQ(0.0625; fel.Ki_fe = _IQ(T/0.1447;17/*初始化ACI-SE模块*//*为Id初始化PID.REG3模块*/pidl_id.Kp_ieg3 = _IQ(0.9463; pidl_id.Ki_ieg3 = _IQ(T/0.04; pidl_id.Kd_ieg3 = _IQ(0/T; pidl_id.Kc_ieg3=_IQ(0.2;sel_const.Ri = RR; sel_const.Li = LR;sel_const.fb = BASE_FREQ; sel_const.fc = 200; seCconst.Ts = T;se l_const.calc(&se l_const;sel・Kl_se = _IQ(sel_const・Kl; sel.K2_se = JQ21(sel_const.K2; sel.K3_se =_IQ(sel_cons(・K3; sel.K4_se = _IQ(sel_const.K4; sel.base_rpm_se = 120*BASE_FREQ/P;pid 1 _id.pid_out_max = _IQ(0・30; pidl」d・pid_ou(_imn = _IQ(-0・30;严为Iq初始化ID.REG3模块*/pidl_iq.Kp_ieg3 = _IQ(0.9463; pidl_iq.Ki_ieg3 = _IQ(T/0.04; pidl_iq.Kd_ieg3 = _IQ(O/T; pidl_iq.Kc_ieg3 =_IQ(0.2;pidl_iq.pid_out_max = _IQ(0.95; pidl_iq.pid_out_nnn = _IQ(-0.95;/*为速度初始化PID.REG3模块*/pidl_spd.Kp_ieg3 =_IQ(0・964;pidl_spd.Ki_ieg3 = _IQ(T*speed_loop_ps/0・2; pidl_spd・Kd_ieg3 =_IQ(O/(T*speed_loop_ps; pid l_spd.Kc_reg3 =_IQ(0.2;pidl_spd.pid_out_max =」Q(1; pidl_spd.pid_out_min = _IQ(-1; // IDLE 循环}mtemipt void EvaTimei l(void {foi(;;;18if (speed_loop_coimt==speed」oop_ps {pidl_spd.pid_ief.reg3 = _IQ(speed_ief; pidl_spd.pid_fclb_ieg3 = sel.wijiat_se;pidl_spd.calc(&pidl_spd; speed_loop_count=l; }else speed」oop_coimt卄;pid l_iq.pid_ief_ieg3 = pid l_spd.pid_out_ieg3; pid l_iq.pid_fdb_reg3 = parkl.qe; pid l_iq.calc(&pid l_iq;pid l_id.pid_ief_ieg3 = _IQ(Id_ief; pidl_id.pid_fdb_ieg3 = paikl.de;pid l_id.calc(&pid l_id;ipaikl.de = pidl_id.pid_out_ieg3; ipaiki.qe = pidl_iq.pid_out_ieg3; lpaikl.ang =fel.theta_i_fe; ipaikl.calc(&ipaikl; svgen_dql.Ualfa = ipaiki.ds; svgen_dql.Ubeta = ipaiki.qs; svgen_dql.calc(&svgen_dql;pwml.Mfunc_cl = (int_IQtoIQ 15(svgen_dql.Ta; /* Mftinc_cl 采用Q15 格式 */ pwml.Mfiinc_c2 = (uit_IQtoIQ 15(svgen_dql.Tb; /* Mfiinc_c2 采用Q15 格式 */pwml.Mfiinc_c3 = (uit_IQtoIQ 15(svgen_dql.Tc;严Mfiinc_c3 采用Q15 格式 */pwml.update(&pwml; ilg2_vdcl.iead(&ilg2_vdc 1;clarke 1 .as = _IQ 15toIQ((longilg2_vdc 1 .Lneas_a; claikel.bs =_IQ 15toIQ((longilg2_vdc 1 ・Imeas_b; clarkel.calc(&claike 1;paikl.ds = clarke 1.ds; paikl.qs = claikel.qs; paikl.ang = fel.tlieta_i_fe; paikl.calc(&paikl;voltl.DC_bus = _IQ15toIQ((longilg2_vdcl.Vdc_meas; voltl.Mfunc_Vl = svgen_dql.Ta;19voltl.Mftinc_V2 = svgen_dql.Tb; voltl.Mfiinc_V3 = svgen_dql.Tc;sel・i_ds_se = claikel.ds; sel・i_qs_se = claikel.qs; sel.psi_di_se = fel.psi_di_fe;sel.psi_qi_se = fel.psLqi^fe; sel.tlieta_i_se = fel.tlieta_i_fe; sel.calc(&sel;/*调用capture读取函数*/fel.u_ds_fe = voltl.Vdiiect; fel.u_qs_fe = voltl.Vquadia; fel.i_ds_fe = claikel.ds; fel.i_qs_fe = claikel.qs; fel.calc(&fel; voltl.calc(&voltl;if((capl.iead(&capl==0 {speed 1 .tune_stamp=(long(cap 1 .tnne_stamp;严读出新的tune stamp */ speed 1 .calc(&speed 1;}pwmdac_clil = (mt_IQtoIQ 15(svgen_dql .Ta; pwmdac_cli2 =(intJQtoIQ 15(clarke 1 .as; pwmdac_ch3 = (int_IQtoIQ 15(fe 1 .tlieta_i_fe;drvl・enable_flg = enable.flg; divl.update(&ckvl;〃在该定时器使能中断}//===========================EvaRegs.EV AIMRA.bit.TlUFINT = 1;PieCtrl.PIEACK.all = PIE AC K_GR0UP2; pwmdac 1 .update(&pwmdac 1;dlog 1 .update(&dlog 1;严调用速度计算函数*/EvaRegs.EV AIFRA.all = BIT9; //相应PIE组2接收到的更多中断20// No more.//—============—==========—=====文件名称:功能描述:ACI.SE.C (IQ version感应电动机开环速度估计器=====/* Iqmath 库函数 */ #include "IQmatliLib.h" #mclude "aci_se.li" voidaci_se_calc(ACISE *v { _iq w_slip, w_syn; /* Slip computation */ v->psi_i_2 =JQmpy(v->psLdi_se,v->psi_di-se+_IQmpy(v->psLqi_se,v->psLqi_se; w_slip = _IQmpy(v・>K 1 _se,(_IQmpy(v->psi_di_se,v・>i_qs_se ・ _IQmpy(v->psi_qi_se,v- >i_ds_se; w_slip =_IQdiv(w_slip,v->psi_i_2; /* 同步速度计算 */ if ((v->tlieta_i_se < DIFF MAX LIMIT&(w>tlieta i se > DIFF MIN LIMIT /* Q21 = Q21*(GL0BAL_Q-GL0BAL_Q */ w_syn =JQmpy(v->K2_se,(v->theta_i_se - v- >theta_r_old; else w_svn = v->wf_psi_r; /* 低通滤波器*//* Q21 = GL0BAL_Q*Q21 十GL0BAL_Q*Q21 */ v->wi_psLf = _IQmpy(v->K3_se,v->wi_psi_i + JQmpv(v- >K4_se,w_syn; v->theta_i_old = v->theta_i_se; /* Q21 = Q21 - GLOBAL_Q */v- >wi_liat_se = v->wi_psi_f - _IQtoIQ21(w_slip; if (v->wi_hat_se>_IQ21(l v->wi_liat_se=_IQ(1; else if (v->wiJiat_se<_IQ21 (-1 v->wi jiat_se = _IQ(-1; else v->wi jiat_se = _IQ2 ltoIQ(v->wi_hat_se; /* QO = QO*GLOBAL_Q => _IQXinpy(, X = GLOBAL_Q */ 21v->wi jiat_ipm_se = _IQmpy(v->base_rpm_se.v->wi Jiat_.se; }严================================= ========文件名称:ACLFE.C功能描述:感应电动机的磁通估计Descuption: Flux Estimator of Induction Motor=========*/ #include n..\include\aci_fe.h n #include M..\include\ataii2_tab.li M extern float sin_tab[]; void aci_fe_calc(ACIFE *v { float i_ds_e, enoi\ eniflold; ATAN2TAB psi_r =ATAN2TAB_DEFAULTS; /* 定子电流PARK 变换 */ if(v- >theta_r_fe+0.25 > 1 i_ds_e =v->Lqs_fe*sin_tab[(int(v->theta_r_fe*256]十v- >Lds_fe*sm_tab[(uit(v->tlieta_i_fe*256-192]: else i_ds_e = v->i_qs_fe*sin_tab[(mt(v- >theta_r_fe*256] +v->i_ds_fe*sin_tab[(int(v->tlieta_i_fe*256+64]; /* 电流模型选择(转子磁通矢量控制方程)*/ v->flx_di_e = v->Kl_fe*v->flx_di_e - v- >K2_fe*i_ds_e;严Paik 逆变换 */ if (v->tlieta_i_fe+0.25 > 1 v->flx_di_s = v- >flx_di_e*sin_tab[(mt(v->theta_r_fe*256-192]; else v->flx_di_s = v- >flx_di_e*sin_tab[(int(v->theta_r_fe*256+64]; v->flx_qi_s =v- >flx_di_e*sin_tab[(int(v->theta_r_fe*256]; /* 根据电流模型计算定子磁通 */ v- >flx ds s = v->K3 fe*v->flx dr s 十v->K4 fe*v->i ds fe; v->flx qs s = v->K3 fe*v->flx_qi_s 十v->K4_fe*v->i_qs_fe;严PI 控制器 */ eiroi = v->psi_ds_fe - v->flx_ds_s;v- >ucomp_ds = v->Kp_fe*enoi 十v->ui_ds; v->ui_ds = v->Kp_fe*v->Ki_fe*enoi 十v- >ui_ds;22enof = v->psLqs_fe - v->flx_qs_s; v->ucomp_qs = v->Kp_fe*eiioi + v->ui_qs; v- >ui_qs = v->Kp_fe*v->Ki_fe*enoi十v->ui_qs; /*根据反电动势的积分估计定子磁通*/ emf old =v->emf ds; v->enif ds = v->u ds fe - v->ucomp ds - v->K5 fe*v- >i_ds_fb; v->psi_ds_fe =v->psi_ds_fe 十v->K6_fe*(0.5*(v->emflds 十emflold; eniflold = v->eniflqs; v->enifLqs =v->u_qs_fe - v->ucomp_qs - v->K5_fe*v->i_qs_fe; v->psi_qs_fe = v->psi_qs_fe 十v->K6_fe*(0.5*(v->eniflqs 十emLold;严根据反电动势的积分估计转子磁通 */ v->psi_dr_fe = v->K7_fe*v->psi_ds_fe - v->K8_fe*v->i_ds_fe; v->psi_qi_fe = v->K7_fe*v->psi_qs_fe -v->K8_fe*v->i_qs_fe; /* 计算转子磁通角 */ psi_i.y = v->psi_qi_fe; psi_i.x = v->psLdi_fe;psi_f.calc(&psi_i; v->tlieta_i_fe = psi.f.ang; } 23。
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真一、本文概述随着电力电子技术和控制理论的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度和优良的调速性能,在电动汽车、风力发电、机器人和工业自动化等领域得到了广泛应用。
然而,PMSM的高性能运行依赖于先进的控制系统,其中矢量控制(Vector Control, VC)是最常用的控制策略之一。
矢量控制,也称为场向量控制,其基本思想是通过坐标变换将电机的定子电流分解为与磁场方向正交的两个分量——转矩分量和励磁分量,并分别进行控制,从而实现电机的高性能运行。
这种控制策略需要对电机的动态行为和电磁关系有深入的理解,并且要求控制系统能够快速、准确地响应各种工况变化。
MATLAB/Simulink/SimPowerSystems是MathWorks公司开发的一套强大的电力系统和电机控制系统仿真工具。
通过Simulink的图形化建模环境和SimPowerSystems的电机及电力电子元件库,用户可以方便地进行电机控制系统的建模、仿真和分析。
本文旨在介绍基于MATLAB/Simulink/SimPowerSystems的永磁同步电机矢量控制系统的建模与仿真方法。
将简要概述永磁同步电机的基本结构和运行原理,然后详细介绍矢量控制的基本原理和坐标变换方法。
接着,将通过一个具体的案例,展示如何使用Simulink和SimPowerSystems进行永磁同步电机矢量控制系统的建模和仿真,并分析仿真结果,验证控制策略的有效性。
将讨论在实际应用中可能遇到的挑战和问题,并提出相应的解决方案。
通过本文的阅读,读者可以对永磁同步电机矢量控制系统有更深入的理解,并掌握使用MATLAB/Simulink/SimPowerSystems进行电机控制系统仿真的基本方法。
基于DSP的异步电机无速度传感器的矢量控制仿真毕业设计(论文)本科生毕业设计设计题目:基于DSP的异步电动机无速度传感器的矢量控制研究中国矿业大学毕业设计任务书毕业设计题目:基于DSP的异步电动机无速度传感器的矢量控制研究毕业设计主要内容和要求:1. 复习电力拖动自动控制系统课程,重点学习异步电机变压变频调速系统理论(包括异步电机动态数学模型和坐标变换技术、转子磁场定向矢量控制系统),了解国内外无传感器控制的现状及发展趋势;2. 学习TMS320C2812DSP;3.学习观测器理论、模型参考自适应等相关理论;掌握异步电动机矢量控制的方法;4.完成异步电动机转子磁链估计模型的DSP实现;5. 采用Matlab/Simulink对转子磁场定向矢量控制系统进行仿真。
院长签字:指导教师签字:中国矿业大学毕业设计指导教师评阅书指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力;③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:指导教师签字:年月日中国矿业大学毕业设计评阅教师评阅书评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;③工作量的大小;④取得的主要成果及创新点;⑤写作的规范程度;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:评阅教师签字:年月日中国矿业大学毕业设计答辩及综合成绩答辩情况提出问题回答问题一正基本有确正确般性错误有原没有则性回答错误答辩委员会评语及建议成绩:答辩委员会主任签字:年月日学院领导小组综合评定成绩:学院领导小组负责人:年月日摘要异步电动机的动态数学模型是一个高阶、非线性,强耦合的多变量系统。
采用坐标变换的方式将三相静止坐标系变为两相同步旋转坐标系,可以实现定子电流的解耦,从而实现磁通和转矩的解耦控制,达到直流电机的控制效果。
基于Matlab的永磁同步电机矢量控制系统仿真研究一、本文概述随着电机控制技术的快速发展,永磁同步电机(PMSM)因其高效率、高功率密度和优良的调速性能,在众多工业领域得到了广泛应用。
为了充分发挥永磁同步电机的性能优势,需要对其进行精确的控制。
矢量控制作为一种先进的电机控制策略,能够实现对电机转矩和磁链的独立控制,从而提高电机的动态和稳态性能。
对基于Matlab的永磁同步电机矢量控制系统进行仿真研究,对于深入理解电机控制原理、优化控制系统设计以及推动电机控制技术的发展具有重要意义。
本文旨在通过Matlab仿真平台,构建永磁同步电机的矢量控制系统模型,并对其进行仿真分析。
文章将介绍永磁同步电机的基本结构和工作原理,为后续的控制系统设计奠定基础。
接着,将详细阐述矢量控制的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,文章将构建基于Matlab的永磁同步电机矢量控制系统仿真模型,并对其进行仿真实验。
通过对仿真结果的分析,文章将评估矢量控制策略在永磁同步电机控制中的应用效果,并探讨可能的优化措施。
二、永磁同步电机的基本原理和特性永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种利用永久磁铁作为转子励磁源的同步电机。
其工作原理主要基于电磁感应定律和电磁力定律,结合现代电力电子技术和先进的控制理论,实现了对电机的高性能控制。
永磁同步电机的核心构造包括定子绕组和永磁体转子两大部分。
定子绕组与交流电源相连,通入三相对称电流后会产生旋转磁场,类似于异步电机中的定子磁场。
不同于异步电机的是,PMSM的转子上镶嵌有高性能稀土永磁材料,这些永磁体在电机运行时不需外部电源励磁,即可产生恒定的磁场。
当定子旋转磁场与转子永磁磁场相互作用时,便会在电机内部形成一个合成磁场,从而驱动转子跟随定子磁场同步旋转。
高效节能:由于取消了传统同步电机所需的励磁绕组和励磁电源,永磁电机减少了励磁损耗,效率通常能达到90以上,尤其在宽负载范围内保持较高的效率水平。
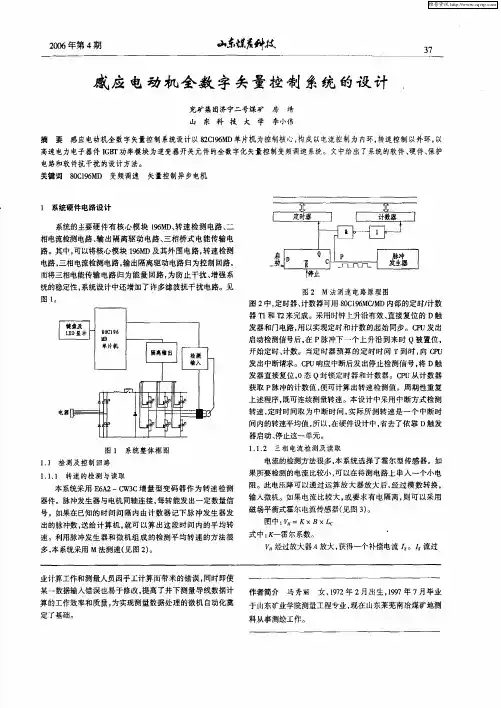
《运动控制系统》课程设计学院:班级:姓名:学号:日期:成绩:感应电机矢量控制系统的仿真摘要:本文先分析了异步电机的数学模型和坐标变换以及矢量控制基本原理,然后利用Matlab /Simulink软件进行感应电机的矢量控制系统的仿真。
采用模块化的思想分别建立了交流异步电机模块、逆变器模块、矢量控制器模块、坐标变换模块、磁链观测器模块、速度调节模块、电流滞环PWM调节器,再进行功能模块的有机整合,构成了按转子磁场定向的异步电机矢量控制系统仿真模型。
仿真结果表明了该系统转速动态响应快、稳态静差小、抗负载扰动能力强,验证了交流电机矢量控制的可行性和有效性。
关键词:异步电机;坐标变换;矢量控制;Simulink仿真一、异步电机的动态数学模型和坐标变换异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,异步电机的数学模型由下述电压方程、磁链方程、转矩方程和运动方程组成。
电压方程:礠链方程:转矩方程:运动方程:异步电机的数学模型比较复杂,坐标变换的目的就是要简化数学模型。
异步电机数学模型是建立在三相静止的ABC坐标系上的,如果把它变换到两相坐标系上,由于两相坐标轴互相垂直,两相绕组之间没有磁的耦合,仅此一点,就会使数学模型简单了许多。
(1)三相--两相变换(3/2变换)在三相静止绕组A、B、C和两相静止绕组a、b 之间的变换,或称三相静止坐标系和两相静止坐标系间的变换,简称 3/2 变换。
(2)两相—两相旋转变换(2s/2r变换)从两相静止坐标系到两相旋转坐标系 M、T 变换称作两相—两相旋转变换,简称 2s/2r 变换,其中 s 表示静止,r 表示旋转。
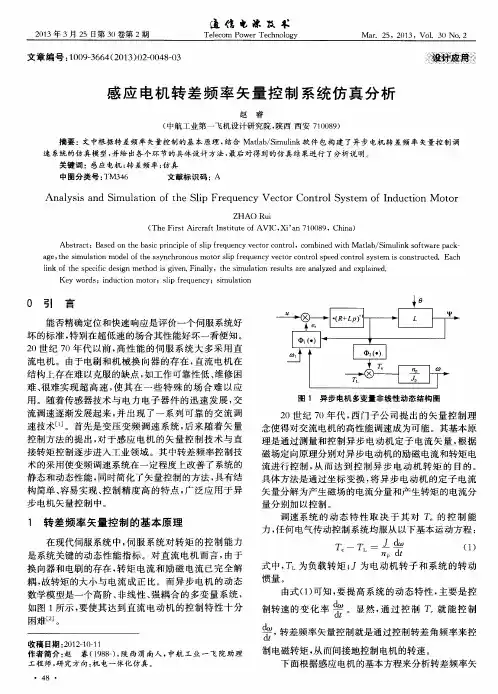
图1、异步电动机的坐标变换结构图二、感应电机矢量控制原理感应电机是指定转子之间靠电磁感应作用,在转子内感应电流以实现机电能量转换的电机。
感应电机是异步电机的一种,异步电机主要是指感应电机。
以上所讲,异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,通过坐标变换,可以使之降阶并化简,但并没有改变其非线性、多变量的本质。
需要高动态性能的异步电机调速系统必须在其动态模型的基础上进行分析和设计,但要完成这一任务并非易事。
经过多年的潜心研究和实践,有几种控制方案已经获得了成功的应用,目前应用最广的就是按转子磁链定向的矢量控制系统。
以产生同样旋转磁动势为准则,在三相坐标系上的定子交流电流 iA、iB 、iC ,通过三相/两相变换可以等效成两相静止坐标系上的交流电流ia、ib ,再通过同步旋转变换,可以等效成同步旋转坐标系上的直流电流im 和 it 。
如果观察者站到铁心上与坐标系一起旋转,他所看到的便是一台直流电机,可以控制使交流电机的转子总磁通 F r 就是等效直流电机的磁通,则M绕组相当于直流电机的励磁绕组,im 相当于励磁电流,T 绕组相当于伪静止的电枢绕组,it 相当于与转矩成正比的电枢电流。
把上述等效关系用结构图的形式画出来,便得到图1。
从整体上看,输入为A,B,C三相电压,输出为转速 w ,是一台异步电机。
从内部看,经过3/2变换和同步旋转变换,变成一台由 im 和it 输入,由 w 输出的直流电机。
既然异步电机经过坐标变换可以等效成直流电机,那么,模仿直流电机的控制策略,得到直流电机的控制量,经过相应的坐标反变换,就能够控制异步电机了。
由于进行坐标变换的是电流(代表磁动势)的空间矢量,所以这样通过坐标变换实现的控制系统就叫作矢量控制系统。
矢量控制系统特点是VC系统强调Te 与Ψr的解耦,有利于分别设计转速与磁链调节器;实行连续控制,可获得较宽的调速范围;但按Ψr 定向受电动机转子参数变化的影响,降低了系统的鲁棒性。
矢量控制的基本方程式为:在设计矢量控制系统时,可以认为,在控制器后面引入的反旋转变换器VR-1与电机内部的旋转变换环节VR 抵消,2/3变换器与电机内部的3/2变换环节抵消,如果再忽略变频器中可能产生的滞后,则图2虚线框内的部分可以完全删去,剩下的就是直流调速系统了。
图2为矢量控制系统原理结构图。
图2、矢量控制系统原理结构图图3、三相异步电机VC 仿真的主电路三、矢量控制仿真1. VC 的仿真模块根据VC 的基本概念,构建VC 调速系统的Matlab /Simulink 仿真模型。
图3主电路,图4为VC 模块。
该仿真模型的工作原理为:转速参考值Wr*光电编码器实测的转速Wr 之差输入到转速控制器ASR ,经PI 算法得到转矩指令值Te*,定子电流的励磁分量isd*由isd*计算模块给出,转矩分量isq*由转矩指令值Te*和磁链估算值计算出,Isd*和isq*经过逆旋转变换2r/2s 和两相-三相变换2s /3s ,获得定子电流指令值ia*、ib*、ic*,与霍尔传感器检测出的三相实测电流ia 、ib 、ic 作为电流滞环控制器的输入,产生PWM 逆变器的触发信号,转速阶跃转速给定器(rad/s)120转速常数转矩阶跃speed pulses 矢量控制Tm mAB C三相交流异步电动机50 HP / 460 V负载转矩给定器v +-VabVDCz 1z1ScopegA BC+-IGBT PWM 逆变器[Iabc][Speed]转矩常数<Rotor speed (wm)><Rotor speed (wm)>Vab (V)<Electromagnetic torque Te (N*m)>送给IGBT 逆变器控制交流电机调速运行。
2. 电机与逆变器模块模块的A 、B 、C 是异步电机三相定子绕组输入端,与IGBT 逆变器的输出端相连,构成由电压型逆变器变频驱动的异步电机子模块。
逆变器模块由6个IGBT 功率管构成通用桥路,逆变器的输入pulses 端为6路PWM 控制信号,完成功率变换及调节功能,直流母线电压VDC 由逆变器模块的/+0、/-0两端输入,它的输出为三相ABC 交流电压。
电机模块还拥有1个电机轴上的机械转矩输入端口Tm 和1个包含21个参数的矢量输出端口m ,其中Tm 为交流电机的负载接入端,用于对 电机进行加载实验;端口m 可通过总线选择器选取需要显示的参数,本文仿真过程中测取了转子转速Wr 、电磁转矩Te 、电机定子电流ia 、ib 、ic 等, 这5个参数与定子相电压Vab 一起送给示波器模块动态显示之。
为了使仿真模型运行速度加快,反馈环节的传递函数采用一阶延迟环节1 /z 。
图4、VC 模快3. 转速调节器ASR 模块转速控制器ASR 模块ASR 结构如图5所示,它根据电机实际反馈转速与参考转速的差值,采用PI 控制器产生转矩命令。
图5、转速调节器ASR 模块积分器是采用梯形法得到的离散时间积分器,图5中的Saturation 元件用于对输出转矩限幅Tem 。
仿真中Kp 、Ki 、Tem 分别取为13、26、300,采样周期Ts 取2us 。
2Iq1Id f(u)iqf(u)id Mux2/32/3cos(u)sin(u)2Teta1Iabc图6、ABC-dq 变换模块结构1pulsesPhirwm Iq Teta转子换向角Teta 计算IdPhir 转子礠链计算ww*Te*转速调节器ASRPhirTe*Iq*iqs*计算Phir*Id*id*计算z10.96Phir*IabcIabc*PulsesPWM 电流滞环控制器ACR[Iabc][Speed]Iabc TetaId IqC3s/2r 坐标变换Teta Id*Iq*Iabc*C2r/3s 坐标变换1speed4. ABC-dq 变换模块与dq-ABC变换模块ABC-dq变换模块完成从A-B-C三相定子坐标系到d-q坐标系的变换,它根据H角,将实际的电机定子电流iabc变换得到d、q坐标系中的分量isd、isq;dq-ABC变换模块完成从d-q 坐标系到A-B-C三相定子坐标系的变换,该模块根据定子电流在d、q坐标系中的分量变换为电机定子的三相电流给定值iabc*。
此外,由于被控对象是三相无中线连接的鼠笼式电机,因此有:ic= - (ia+ib)5. 转子磁链Ψr计算模块与转子换向角θ计算模块转子磁链Ψr计算模块的作用是由定子电流的励磁分量isd计算转子磁通Ψr,图8、图9分别为转子磁链图(a)定子a,b相之间的电压Uab图(b)定子电流isa,isb,isc图(c)转子速度Ψr计算模块、转子换向角计算模块的结构。
6. Isq*计算模块与isd*计算模块图10、图11分别为isq*计算模块、isd*计算模块的结构。
四、仿真结果分析本系统的仿真中,交流异步电机参数分别取为:L1s=0. 8 mH,L1r=0. 8 mH,Lm=34. 7 mH,Rs=0. 0878,Rr=0. 228,np=2,J=0. 662,F=0. 1N.m.s,电机额定功率Pn=3. 7kW,额定转速Wn=120 rad /s,额定频率f=50Hz,额定线电压Uab=500 V,逆变器直流电源Vdc= 780 V,转子磁链给定值Ψr*=0.96Wb。
仿真算法采用stiff算法,仿真时间设为3 s。
图(f)负载恒定,转速变化仿真曲线从仿真曲线可见,不管空载还是有载,转速控制信号的改变很快引起了系统输出转速的响应,电流、转矩、磁链也能随之而相应变化,这说明矢量控制实现了定子电流励磁分量和转矩分量的解耦。
另外,电机启动后系统响应快且平稳、转速超调小且稳态误差小,当负载变化或转速变化时,电机又能很快重新稳定。
仿真结果表明交流电机矢量控制方法具有良好的动静态性能,较强的适应能力和抗干扰能力。
五、设计心得体会通过本次感应电机矢量控制系统的Matlab/Simulink仿真课程设计,异步电动机数学模型、坐标变化、异步电动机调速等知识都得到了加强和巩固,我对矢量控制也有了更深入的理解。
这次的设计使我更熟练Matlab 仿真软件的使用,我对仿真的兴趣也更大了。
仿真实验表明仿真模型的动态仿真过程与实际调速系统运动过程基本吻合,充分验证了在感应电机矢量变换数学模型的基础上结合Simulink建立的仿真模型的正确性。
也说明Matlab非常适合电机控制领域内的仿真及研究,在某些问题的研究中Matlab/Simulink 能带来极大的方便并使效率极大提高。
实验证明,用Simulink进行交流调速系统的动态仿真,具有方便、直观、灵活、精确的优点,是比较理想的仿真方法。