异步电动机矢量控制
- 格式:ppt
- 大小:2.22 MB
- 文档页数:46
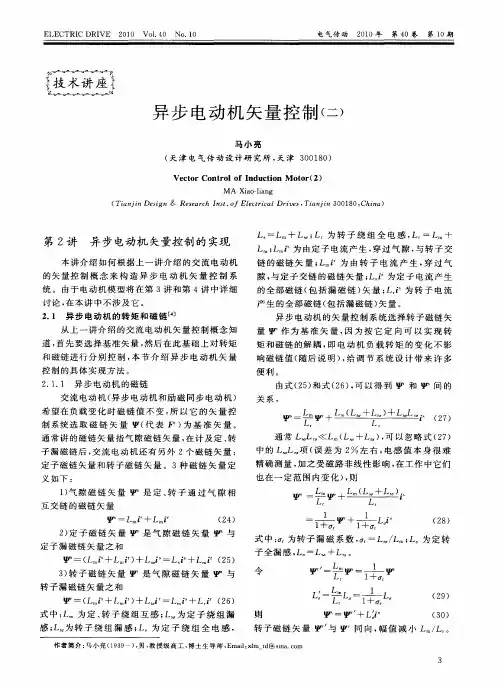
目录1 异步电动机矢量控制原理 (2)2 坐标变换 (3)2.1 坐标变换基本思路 (3)2.2 三相——两相坐标系变换(3/2变换) (4)2.3 旋转变换 (5)3 转子磁链计算 (6)4 矢量控制系统设计 (7)4.1 矢量控制系统的电流闭环控制方式思想 (7)4.2 MATLAB系统仿真系统设计 (8)4.3 PI调节器设计 (9)5 仿真结果 (10)5.1 电机定子侧的电流仿真结果 (10)5.2 电机输出转矩仿真结果 (11)心得体会 (13)参考文献 (14)异步电机矢量控制Matlab 仿真实验1 异步电动机矢量控制原理矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
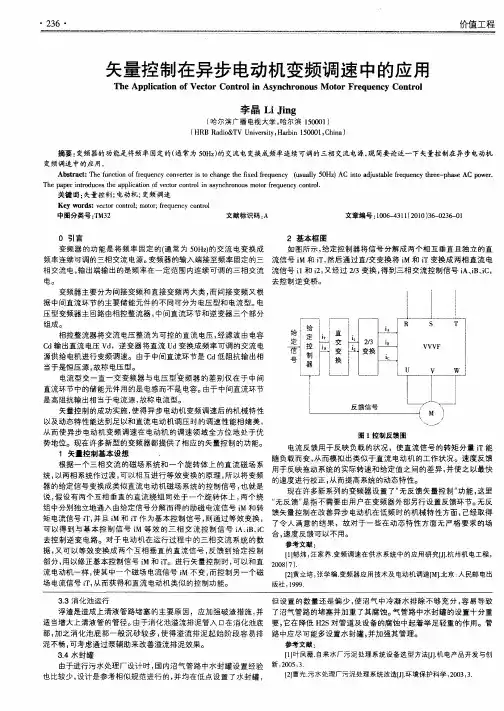
其中等效的直流电动机模型如图1-1所示,在三相坐标系上的定子交流电流i A 、i B 、i C ,通过3/2变换可以等效成两相静止正交坐标系上的交流i sα和i sβ,再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流i sm 和i st 。
图1-1 异步电动机矢量变换及等效直流电动机模型在三相坐标系上的定子交流电流,,A B C i i i ,通过3/2变换可以等效成两相静止正交坐标系上的交流s i α和s i β再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流sm i 和st i 。
m 绕组相当于直流电动机的励磁绕组,sm i 相当于励磁电流,t 绕组相当于电枢绕组,st i 相当于与转矩成正比的电枢电流。
摘要因为异步电动机的物理模型是一个高阶、非线性、强耦合的多变量系统,需要用一组非线性方程组来描述,所以控制起来极为不便。
异步电机的物理模型之所以复杂,关键在于各个磁通间的耦合。
如果把异步电动机模型解耦成有磁链和转速分别控制的简单模型,就可以模拟直流电动机的控制模型来控制交流电动机。
直接矢量控制就是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果。
本文研究了矢量控制系统中磁链调节器的设计方法。
并用MATLAB最终得到了仿真结果。
关键词:矢量控制非线性 MATLAB仿真目录1 设计条件及要求 (1)1.1设计条件 (1)1.2设计要求 (1)2 异步电动机矢量控制原理及基本方程式 (2)2.1 矢量控制基本原理 (2)2.2 按转子磁链定向的基本方程 (3)3 坐标变换 (5)3.1 坐标变换原理 (5)3.2 建立坐标变换模型 (7)3.2.1 2r/3s变换模型 (7)3.2.2 3s/2r变换模型 (8)4 矢量控制系统设计 (9)4.1 矢量控制系统的电流闭环控制方式思想 (9)4.2 MATLAB系统仿真系统设计 (9)4.3 PI调节器设计 (10)5仿真结果 (12)5.1 电机定子侧的电流仿真结果 (12)5.2 电机的转子转速和转子磁链仿真结果 (13)结论 (15)心得体会 (16)参考文献 (17)1 设计条件及要求1.1设计条件电机参数为:额定功率power=2.2KW,线电压L U =,额定频率50f Hz =;定子电阻0.435s R =Ω,漏感0.002ls H L =;转子电阻,0.816r R =Ω,漏感,0.002lr H L =;互感0.069m H L =,转动惯量0.089.^2J kg m =,极对数2P =,其余参数为0。
1.2设计要求(1)负载为恒转矩负载N T L 120=; (2)转速n=1400rad/min ;2 异步电动机矢量控制原理及基本方程式2.1 矢量控制基本原理矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
异步电机矢量控制原理一、引言异步电机是一种广泛应用的电动机,其控制方式主要有直接转矩控制和矢量控制两种。
其中,矢量控制是一种更加精确、灵活的控制方式,可以实现高效率、高性能的运行。
本文将详细介绍异步电机矢量控制原理。
二、异步电机基础知识1. 异步电机结构和工作原理异步电机由定子和转子两部分组成,定子上有三个相位交流绕组,转子上则有导体条。
当三相电源施加在定子上时,会产生旋转磁场,进而感应出转子中的感应电动势,并使得导体条在旋转磁场中感受到一个旋转力矩,从而带动转子运动。
2. 异步电机参数异步电机的参数包括定子电阻、定子漏抗、定子互感、转子漏抗等等。
这些参数对于确定异步电机的特性非常重要。
3. 感应电动势和反电动势当三相交流电源施加在定子上时,会产生一个旋转磁场,并且这个旋转磁场的频率与供电频率相同。
这个旋转磁场会感应出转子中的感应电动势,从而产生一个旋转力矩。
同时,由于异步电机的运动,转子中也会产生一个反电动势,其大小与运动速度成正比。
三、矢量控制基础知识1. 矢量控制简介矢量控制是一种通过模拟直流电机的方式来控制交流电机的方法。
它可以实现非常精确的控制,并且可以根据需要调整转速和转矩。
2. 矢量控制原理在矢量控制中,将交流电机看作一个带有两个分量(即直流分量和交流分量)的向量。
通过对这两个分量进行分别控制,就可以实现对交流电机的精确控制。
四、异步电机矢量控制原理1. 矢量控制与异步电机结合在异步电机中使用矢量控制时,需要将交流电源输入到变频器中,并将其输出到异步电机上。
变频器会将交流信号转换为直流信号,并将其分解为两个分量:一个用于产生旋转磁场(即定子磁通),另一个用于产生反向转矩(即转子电流)。
2. 矢量控制中的定子电流和磁通在矢量控制中,定子电流和磁通是非常重要的参数。
定子电流决定了旋转磁场的大小,而磁通则决定了旋转磁场的方向。
因此,在进行异步电机矢量控制时,需要对定子电流和磁通进行精确控制。
异步电动机矢量控制_FOC_和直接转矩控制_DTC_方案的比较首先,我们来看看FOC方案。
FOC方案是基于电机矢量控制理论而发展起来的一种控制方法,在控制异步电动机时,可以通过精确测量和控制转子磁链矢量的方向和大小,来实现精确控制电机的转矩和转速。
其核心思想是将电动机的三相定子电流进行矢量拆分,分为一个磁场矢量和一个转矩矢量,从而实现转子磁链方向和大小的控制。
FOC方案的优点是控制精度高,响应速度快。
由于可以实时测量和控制电机的磁链矢量,FOC方案可以精确控制电机的转矩和转速。
此外,由于转子磁链矢量可以根据需要即时调整,FOC方案可以快速响应转矩和速度的变化,从而适用于需要快速响应和精确控制的应用。
然而,FOC方案也存在一些缺点。
首先,FOC方案的实现较为复杂,需要进行电流和电压的矢量控制,以及相应的转子定位和速度估算算法。
这些复杂的控制算法在实践中需要较高的计算能力和较多的计算资源,因此实现起来较为困难。
其次,FOC方案对于电机参数和系统模型的准确性要求较高。
由于FOC方案需要测量和控制转子磁链矢量,因此对电机参数和系统模型的准确性要求较高,如果参数不准确,将导致控制性能下降。
接下来,我们来看看DTC方案。
DTC方案是一种基于直接转矩控制原理的控制方法,其核心思想是通过采用转矩和磁链两个控制变量直接控制电机的转矩和速度。
DTC方案通过测量和计算磁链和转矩的误差,根据预定的控制规则直接调节电机的电压和频率,以实现对电机转矩和速度的控制。
DTC方案的优点是实现简单,控制快速。
DTC方案不需要进行电流和电压的矢量控制,只需要测量和控制磁链和转矩的误差,因此实现起来相对简单。
此外,DTC方案由于直接控制电机的电压和频率,可以快速响应转矩和速度的变化,适用于需要快速相应和简单控制的应用。
然而,DTC方案也存在一些缺点。
首先,DTC方案的动态性能较差。
由于DTC方案是基于磁链和转矩误差进行控制的,其控制性能受到不可避免的误差和延迟的影响,因此其动态性能较差,不能达到FOC方案的精确度和响应速度。
异步电动机矢量控制的基本思路1. 什么是异步电动机?大家好,今天我们来聊聊异步电动机,听上去是不是有点生涩?其实,这个词儿就像一杯淡淡的咖啡,虽然乍一看不怎么样,但细品之下却充满了风味。
异步电动机,顾名思义,它的转速并不是和电源频率完全一致的。
简单点说,就是电机的转速和电网的频率有点“拉锯”,就像朋友之间的小争执,谁也不愿意让步。
它是我们生活中常见的电动机之一,广泛应用于各种机械设备,比如空调、洗衣机,还有咱们家里常用的电风扇。
1.1 异步电动机的工作原理说到工作原理,这个就像是每个电动机的小秘密。
它是利用电流通过线圈产生磁场,与转子之间的相互作用来实现转动的。
可以想象一下,当你在滑冰场上,滑冰者的动作和滑冰场的冰面就像电机和电源之间的关系。
电流通过定子线圈,形成旋转磁场,而转子则在这个磁场的“引导”下开始转动。
虽然这个过程听起来复杂,但其实它的运行就像在舞池里跳舞一样,只要节奏对了,所有的一切就会顺畅无比。
1.2 为何要用矢量控制?那么,矢量控制又是什么呢?听起来像是高大上的术语,其实就是让电动机更聪明、表现更好的一种方法。
咱们都知道,电动机的性能好不好,转速和扭矩是关键。
这就像是赛车比赛,车速和加速度决定了谁能先冲过终点线。
而矢量控制的核心就在于将电机的电流分解成两个部分:一个是产生转矩的部分,另一个是控制磁场的部分。
通过这样的方式,我们就能精准地控制电机的运行状态,确保它能在各种条件下都表现得游刃有余,简直就像是专业赛车手在赛道上飞驰,毫无压力。
2. 矢量控制的基本原理接下来,我们聊聊矢量控制的基本原理。
想象一下,你在玩一款射击游戏,敌人四处移动,而你需要精准瞄准才能一枪命中。
矢量控制的思路就是这样,通过实时监测电机的状态,动态调整控制策略,确保电机能够适应不同的负载和运行环境。
它主要依靠两个重要的参数:电流和电压。
通过控制这两个参数,我们就能精确调节电机的运行状态。
2.1 参考框架矢量控制可以看作是建立在一个参考框架上的。
矢量控制与V/F控制详解
一、矢量控制
1、矢量控制简介
矢量控制是一种电机的磁场定向控制方法:以异步电动机的矢量控制为例:它首先通过电机的等效电路来得出一些磁链方程,包括定子磁链,气隙磁链,转子磁链,其中气息磁链是连接定子和转子的.一般的感应电机转子电流不易测量,所以通过气息来中转,把它变成定子电流.然后,有一些坐标变换,首先通过3/2变换,变成静止的d-q坐标,然后通过前面的磁链方程产生的单位矢量来得到旋转坐标下的类似于直流机的转矩电流分量和磁场电流分量,这样就实现了解耦控制,加快了系统的响应速度.最后再经过2/3变换,产生三相交流电去控制电机,这样就获得了良好的性能。
综合以上:矢量控制无非就四个知识:等效电路、磁链方程、转矩方程、坐标变换(包括静止和旋转)。
矢量控制可以根据客户的需要微调电机,可以做伺服电机用。
不是以电机效率为最高追求,而是以工程要求,时刻跟踪反馈控制。
2、矢量控制详解
矢量控制概念:矢量控制目的是设法将交流电机等效为直流电机,从而获得较高的调速性能。
矢量控制方法就是将交流三相异步电机定子电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流)分别加以控制,并同时控制两分量间的幅值和相位,这样即可等效于直流电机。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
矢量控制特点:变频器矢量控制,按照是否需要转速反馈环节,一般分为无反馈矢量控制和有反馈矢量控制。
1)无反馈矢量控制。
无反馈矢量控制方式优点是:
a)、使用方便,用户不需要增加任何附加器件。
异步电机的矢量控制引言异步电机是一种常用的电动机类型,多用于工业领域。
在控制异步电机的过程中,矢量控制技术被广泛应用。
本文将详细介绍异步电机的矢量控制原理及其应用。
矢量控制原理1.矢量控制概述矢量控制是一种基于电机磁链方向和大小的控制技术。
通过控制电机转子磁链,可以实现电机的启动、停止、加速、减速等控制操作。
2.矢量控制基本原理矢量控制的基本原理是通过实时测量电机的电流、转速、位置等参数,实现对电机转子磁链的实时控制。
控制器根据测量值计算出所需的电流矢量,并通过逆变器向电机施加相应的电流,使电机实现特定的运动。
矢量控制的参数测量与计算1.电机电流测量电机电流是矢量控制的重要参数之一。
可以通过采样电机两相之间的电压,利用欧姆定律计算得到电机电流。
2.电机转速测量电机转速测量可以通过安装编码器或霍尔传感器来实现。
编码器可以直接测量电机转子的位置,通过计算单位时间内的位置变化,可以得到电机转速。
3.电机位置测量电机位置测量可以通过编码器或霍尔传感器来实现。
编码器可以直接测量电机转子的位置,通过计算单位时间内的位置变化,可以得到电机位置。
4.电机磁链计算电机磁链可以通过测量电机的电流和电压来计算。
根据电机的等效电路模型,可以得到电机磁链的表达式。
矢量控制策略1.矢量控制模型矢量控制模型包括电流模型和转矩模型。
电流模型用于控制电机的电流矢量,转矩模型用于控制电机的转矩。
2.电流闭环控制电流闭环控制是矢量控制的重要组成部分。
通过对电机电流进行实时的测量、采样和控制,可以实现对电机转矩和速度的精确控制。
3.磁链闭环控制磁链闭环控制是矢量控制的关键环节。
通过对电机磁链进行实时的测量、采样和控制,可以实现对电机的磁场方向和大小的精确控制。
4.转速闭环控制转速闭环控制是矢量控制的基本要求之一。
通过对电机转速进行实时的测量、采样和控制,可以实现对电机速度和位置的精确控制。
矢量控制的应用1.电动汽车矢量控制技术在电动汽车中得到广泛应用。
三相异步电机vf矢量控制
三相异步电机的VF(Voltage-Frequency,电压-频率)控制是一种基本的交流调速技术,它通过改变电源的电压和频率来调节电机的速度。
这种控制方式在恒转矩负载下可以保持电机输出转矩与频率成正比变化,以实现电机速度的平滑调节。
然而,VF控制存在一些局限性,如低频时由于电压降低导致的转矩不足、动态响应较慢以及无法精确控制电机磁通等。
而矢量控制(Vector Control),也称为磁场定向控制(Field Oriented Control, FOC),则是一种更为先进的交流电动机控制方法,尤其是对三相异步电机而言。
矢量控制通过对定子电流进行解耦处理,分别控制励磁电流分量(产生磁场)和转矩电流分量(产生转矩),使得电机能够在宽广的速度范围内获得接近直流电机的性能表现。
在矢量控制中,控制器根据电机模型实时计算出应该施加到电机上的最佳电压矢量,从而精准地控制电机的磁场强度和转矩输出,达到高精度的速度控制和快速的动态响应效果。
相比于VF控制,矢量控制能够有效提高系统的稳定性和动态性能,并能在低频运行时保持较高的输出转矩,适用于对速度控制要求较高的场合。