直线度-形位公差之一
- 格式:doc
- 大小:160.73 KB
- 文档页数:11
一)、直线度误差的测量和评定方法1、直线度——表示零件被测的线要素直不直的程度。
2、直线度公差:指实际被测直线对理想直线的允许变动量。
3、直线度公差带:包容实际直线且距离为最小的两平行直线(或平面)之间的距离ƒ或圆柱体的直径؃。
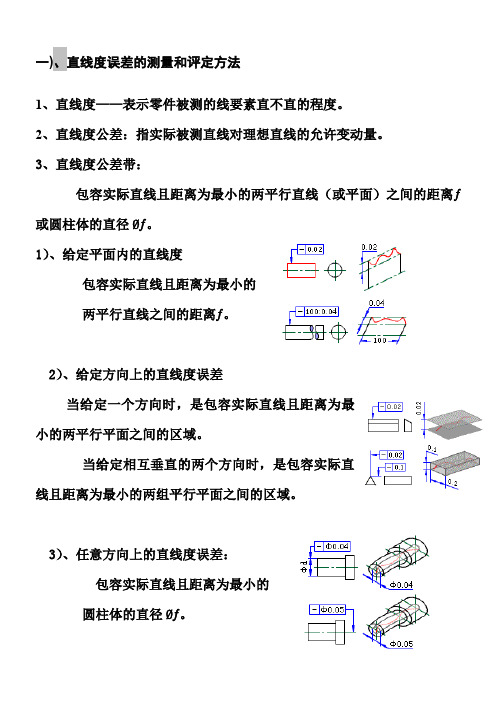
1)、给定平面内的直线度包容实际直线且距离为最小的两平行直线之间的距离ƒ。
2)、给定方向上的直线度误差当给定一个方向时,是包容实际直线且距离为最小的两平行平面之间的区域。
当给定相互垂直的两个方向时,是包容实际直线且距离为最小的两组平行平面之间的区域。
3)、任意方向上的直线度误差:包容实际直线且距离为最小的圆柱体的直径؃。
4、直线度误差的检测方法按照测量原理、测量器具及测量基准等可将直线度误差的检测方法分为四类:直接方法、间接方法、组合方法和量规检验法。
1)、直接方法:此类方法一般是首先确定一条测量基线,然后通过测量得到实际被测直线上的各点相对测量基线的偏差,再按规定进行数据处理得到直线度值。
(素线的测量)(1)、光隙法:将被测实际素线与其理想直线相比较来测量给定平面内直线度误差的测量方法。
是将刀口尺置于被测实际线上并使与被测线紧密接触,转动刀口尺使它的位置符合最小条件,然后观察刀口尺与被测线之间的最大光隙,此最大光隙即为直线度误差。
当光隙较大时,可用量块和塞尺测量其值,光隙较小时,可通过与标准光隙比较,估读出光隙量大小。
该方法适合于磨削或研磨加工的小平面及短园柱(锥)面的直线度误差的测量。
标准光隙:标准光隙由1级量块、0级刀口尺和1级平面平晶组成。
光隙尺寸的大小借助于光线通过狭缝时呈现的不同颜色来鉴别。
光隙 >2.5um时,光线呈白光:间隙在 1.25—1.17um时,呈红光:间隙约为0.8um 时,呈蓝光;间隙<0.5um 时,则不透光。
(2)、打表测量法、拉线基准法(测微法):用指示表测量零件表面直线度,是一种与理想直线比较,测量给定平面内直线度误差的方法。


Tyco/AMPTeam-D QA Page 1国家标准规定的形状公差的特征项目分为形状公差和位置公差两大类,共14 个,它们的名称和符号如下表所示。
Tyco/AMPTeam-D QA Page 2形位公差的定义直线度-所有点都在一条直线上的情况,公差由两条平行线形成的区域来指定平面度-表面上所有的点都在一个平面上,公差由两个平行平面形成的区域来表示。
圆度-表面上所有点都在圆周上。
公差由两个同心圆限制的区域来指定。
圆柱度-旋转表面上的所有点都与公共轴等距。
圆柱公差制定了两个同心圆柱所形成的公差区域,此旋转表面必须在此区域中。
轮廓度-控制不规则的表面、线条、弧形或普通位面的定义公差方式。
轮廓可适用于单个线条元件或者零件的整个表面。
轮廓公差指定了沿着实际轮廓的唯一边界。
倾斜度-表面与轴处于指定角度的情况(与数据平面或轴的角度不是90度)。
公差区域是由两个平行平面定义的,这两个平行平面与数据平面或轴成指定的基本角度。
垂直度-表面或轴与数据平面或轴成直角的情况。
垂直公差指定了下列情况之一:由垂直于数据平面或轴的两个平面定义的区域,或者由垂直与数据轴的两个平行平面所定义的区域。
平行度-表面与轴上所有点与数据平面或轴等距的情况。
平行度公差指定了下列情况之一:平行于数据平面或轴的两个平面或线定义的区域,或者其轴平行于数据轴的圆柱公差区域。
同轴度-旋转表面的所有交叉可组合元素的轴,是数据特征的公共轴。
同心度公差指定了其轴与数据轴一致的圆柱公差区域。
位置度-位置度公差定义了允许其中中心轴或者中心平面偏离真正(理论上正确)位置的区域。
基本尺寸建立了从数据特征和相互关联的特征之间的真正位置。
位置误差是,特征与其正确位置间,总的可允许的位置偏移量。
对于孔和外部直径这样的圆柱特征来说,位置度公差通常是特征轴必须在其中的公差区域的直径。
对于不是圆的特征(如槽和短小的突出物)来说,位置度公差是特征的中心平面必须在其中的公差区域的总宽度。


直线度、平面度、圆度、圆柱度...这些形位公差你都了如指掌?作为机加工老司机,你阅图无数,加工无数。
当我们说到“形位公差”,它是既理论又实际的专业知识,你对它有多了解呢?在生产中,如果我们对图纸标注的形位公差理解错误,就会使加工分析、加工结果与要求偏离,甚至带来严重后果。
今天,就让我们一起来系统了解14项形位公差。
先给大家看重点,下面这张表是国际统一化的14项形位公差符号,这非常重要哦。
01 直线度直线度,即通常所说的平直程度,表示零件上的直线要素实际形状保持理想直线的状况。
直线度公差是实际线对理想直线所允许的最大变动量。
示例1:在给定平面内,公差带必须在距离为0.1mm的两平行直线间的区域。
02 平面度平面度,即通常所说的平整程度,表示零件的平面要素实际形状,保持理想平面的状况。
平面度公差是实际表面对理想平面所允许的最大变动量。
示例:公差带是位于距离0.08mm的两个平行平面之间的区域。
03 圆度圆度,即通常所说的圆整程度,表示零件上圆的要素实际形状与其中心保持等距的状况。
圆度公差是在同一截面上,实际圆对理想圆所允许的最大变动量。
示例:公差带必须在同一正截面上,半径差为公差值0.03mm的两个同心圆之间的区域。
04 圆柱度圆柱度是表示零件上圆柱面外形轮廓上的各点,对其轴线保持等距状况。
圆柱度公差是实际圆柱面对理想圆柱面所允许的最大变动量。
示例:公差带是半径差为公差值0.1mm的两个同轴圆柱面之间的区域。
05 线轮廓度线轮廓度是表示在零件的给定平面上,任意形状的曲线,保持其理想形状的状况。
线轮廓度公差是指非圆曲线的实际轮廓线的允许变动量。
06 面轮廓度面轮廓度是表示零件上的任意形状的曲面,保持其理想形状的状况。
面轮廓度公差是指非圆曲面的实际轮廓线,对理想轮廓面的允许变动量。
示例:公差带是由包络一系列直径为0.02mm的球的两条包络线之间,诸球的中心理论上应位于理论正确几何形状的面上。
07 平行度平行度,即通常所说的保持平行的程度,表示零件上被测实际要素相对于基准保持等距离的状况。

一)、直线度误差的测量和评定方法1、直线度——表示零件被测的线要素直不直的程度。
2、直线度公差:指实际被测直线对理想直线的允许变动量。
3、直线度公差带:包容实际直线且距离为最小的两平行直线(或平面)之间的距离ƒ或圆柱体的直径؃。
1)、给定平面内的直线度包容实际直线且距离为最小的两平行直线之间的距离ƒ。
2)、给定方向上的直线度误差当给定一个方向时,是包容实际直线且距离为最小的两平行平面之间的区域。
当给定相互垂直的两个方向时,是包容实际直线且距离为最小的两组平行平面之间的区域。
3)、任意方向上的直线度误差:包容实际直线且距离为最小的圆柱体的直径؃。
4、直线度误差的检测方法按照测量原理、测量器具及测量基准等可将直线度误差的检测方法分为四类:直接方法、间接方法、组合方法和量规检验法。
1)、直接方法:此类方法一般是首先确定一条测量基线,然后通过测量得到实际被测直线上的各点相对测量基线的偏差,再按规定进行数据处理得到直线度值。
(素线的测量)(1)、光隙法:将被测实际素线与其理想直线相比较来测量给定平面内直线度误差的测量方法。
是将刀口尺置于被测实际线上并使与被测线紧密接触,转动刀口尺使它的位置符合最小条件,然后观察刀口尺与被测线之间的最大光隙,此最大光隙即为直线度误差。
当光隙较大时,可用量块和塞尺测量其值,光隙较小时,可通过与标准光隙比较,估读出光隙量大小。
该方法适合于磨削或研磨加工的小平面及短园柱(锥)面的直线度误差的测量。
标准光隙:标准光隙由1级量块、0级刀口尺和1级平面平晶组成。
光隙尺寸的大小借助于光线通过狭缝时呈现的不同颜色来鉴别。
光隙 >2.5um时,光线呈白光:间隙在 1.25—1.17um时,呈红光:间隙约为0.8um时,呈蓝光;间隙<0.5um时,则不透光。
(2)、打表测量法、拉线基准法(测微法):用指示表测量零件表面直线度,是一种与理想直线比较,测量给定平面内直线度误差的方法。
必知的形位公差知识全集一、形位公差的代号(GB/T 1182-1996)注:形位公差符号的线型宽度为b/2~b(b为粗实线宽),但跳动符号的箭头外的线是细实线。
二、形状、位置公差带的定义和图例说明GB/T 1182-19961 直线度a. 在给定平面内的公差带定义——公差带是距离为公差值t的两平行直线之间的区域。
b. 在给定方向上的公差带定义——当给定一个方向时,公差带是距离为公差值t的两平行平面之间的区域;当给定互相垂直的两个方向时,公差带是正截面尺寸为公差值t1×t2的四棱柱内的区域。
c. 在任意方向上的公差带定义——公差带是直径为公差值t的圆柱面内的区域。
2. 平面度公差带定义——公差带是距离为公差值t的两平行平面之间的区域。
3. 圆度公差带定义——公差带是在同一正截面上半径差为公差值t的两同心圆之间的区域。
4.圆柱度公差带定义——公差带是半径差值t的两同轴圆柱面之间的区域。
5. 线轮廓度公差带定义——公差带是包络一系列直径为公差值t的圆的两包络线之间的区域,诸圆圆心应位于理想轮廓线相对基准有位置要求时,其理想轮廓线系指相对基准为理想位置的理想轮廓线。
6.面轮廓度公差带定义——公差带是包络一系列直径为公差值t的球的两包络面间的区域,诸球球心应位于理想轮廓面上。
注:当被测轮廓面相对基准有位置要求时,其理想轮廓面系指相对于基准为理想位置的理论轮廓面。
7. 平行度a. 在给定的方向上的公差带定义——当给定一个方向时,公差带是距离为公差值t,且平行于基准平面(或直线、轴线)的两平行面之间的区域;当给定相互垂直的两个方向时,是正截面尺寸为公差值t1×t2,且平行于基准轴线的四棱柱内的区域。
b. 在任意方向的公差带定义——公差带是直径为公差值t,且平行于基准轴线的圆柱面内的区域。
8. 垂直 度a. 在给定方向上的公差带定义——当给定一个方向时,公差带是距离为公差值t ,且垂直于基准平面(或直线、轴线)的两平行平面(或直线)之间的区域当给定两个互相垂直的方向时,是正截面为公差值t 1×t 2,且垂直于基准平面的四棱柱内的区域。
形位公差特征符号全解形位公差是指对于同一特征的多个部件之间,其尺寸、形状或位置的差异。
为了描述和表示这些差异,工程图纸中使用一些特定的符号和标记,被称为形位公差特征符号。
下面将介绍常见的形位公差特征符号及其含义。
1.直线度(直线形位公差):用于描述直线的直度程度,标记为⋀。
直线度公差表示直线上各点与最佳拟合直线之间的偏差。
2.圆度:用于描述圆形特征的圆形度,标记为⌒。
圆度公差表示任何圆形线的各点到最小直径与最大直径之间的偏差。
3.平面度:用于描述平面特征的平整程度,标记为⌓。
平面度公差表示平面上各点到最佳拟合平面之间的偏差。
4.垂直度:用于描述两条直线或平面之间的垂直程度,标记为∟。
垂直度公差表示两条直线或平面之间的角度偏差。
5.圆柱度:用于描述圆柱形部件表面的圆度变化,标记为Ο。
圆柱度公差表示圆柱形特征各截面上的圆度偏差。
6.圆锥度:用于描述圆锥形部件表面的圆度变化,标记为Δ。
圆锥度公差表示圆锥形特征各截面上的圆度偏差。
7.平行度:用于描述两个平面之间的平行程度,标记为∥。
平行度公差表示两个平面之间的距离偏差。
8.同轴度:用于描述两个轴线之间的同轴程度,标记为⊙。
同轴度公差表示两条轴线之间的距离和角度偏差。
9.倾斜度:用于描述两个平面或轴线之间的倾斜程度,标记为∠。
倾斜度公差表示两个平面或轴线之间的倾斜角度偏差。
10.全距:用于描述特征的最大与最小尺寸差之间的范围,标记为×。
全距公差表示最大与最小尺寸之间的偏差范围。
11.平均值:用于描述多个相同特征的尺寸的平均值,标记为X。
平均值公差表示多个相同特征的尺寸之间的平均偏差。
这些形位公差特征符号及其含义在工程图纸中被广泛使用,以确保各部件之间的尺寸、形状和位置的一致性。
通过使用这些符号,工程师和生产人员可以准确地理解和理解设计要求,并确保在制造和装配过程中达到所需的质量水平。
形状与位置公差形、位公差标注1、前言图样是工程技术人员表达设计思想的工具,是一种里面包含着非常丰富的,包括产品的功能、工艺、材料及检验等各类信息的工程师的专用语言,人们就是利用这种专用语言中传递的各种信息把思维变成为现实。
图样的质量直接影响到产品或零部件的质量,因此,保证图样所传递的信息的正确性并使其符合国家标准的规定是图样的基本要求。
对于机械零部件而言,每张完全满意的设计图样,都必须把对象的四大主要参数表达清楚。
这四大主要参数就是对象的形状、大小及对象上各要素之间的方向和位置。
在图样上,要素所呈现的形状、大小及各要素之间的方向和位置都是它的理想状态,但在制造过程中会出现各种各样的误差(超出理想状态的差距),这是不可避免的。
但这出现的各种各样的误差将会直接影响到机件的功能好坏。
因此,从保证机件的功能出发,就必须对机件的各种各样的误差加以限制,也就是对机件的四个主参数:形图1-1 a)所示是以角度公差来控制A面对底面的方向,即实际机体上其A面对底面的实际夹角α'只要满足下式即为合格:α-△α≤α'≤α+△α以角度单位标注的角度公差只控制提取组成要素(提取线或提取表面素线)的总方向,不控制提取要素的形状误差。
总方向是指接触线(接触面)的方向,接触线(接触面)是与提取组成要素相接触的最大距离为最小的理想直线(理想平面)。
从图1-1 a1)、图1-.1 a2)、图1-1 a3)三个图中可以看到,斜面A的形状误差越来越大,但其角度误差却一直保持在α-△α≤α'≤α+△α之间。
因此,从角度误差的评定来说是合格的。
现在用倾斜度公差来控制,见图1-1 b1)、图1-1 b2)、图1-1 b3), 当形状误差小时,从误差的评定来说是合格的。
但形状误差大到一定程度,如图1-1 b3),虽说角度误差是合格的,但从倾斜度误差的评定来说是不合格的。
从此可以看出,倾斜度公差不但能控制方向,而且还同时能够控制形状误差。
图1-1 角度误差和倾斜度误差的评定图1-2所示为模架的上模座图样,该零件对厚度尺寸H的要求不高,故公差可选用未注尺寸公差。
一)、直线度误差的测量和评定方法
1、直线度——表示零件被测的线要素直不直的程度。
2、直线度公差:指实际被测直线对理想直线的允许变动量。
3、直线度公差带:
包容实际直线且距离为最小的两平行直线(或平面)之间的距离ƒ或圆柱体的直径؃。
1)、给定平面内的直线度
包容实际直线且距离为最小的
两平行直线之间的距离ƒ。
2)、给定方向上的直线度误差
当给定一个方向时,是包容实际直线且距离为最
小的两平行平面之间的区域。
当给定相互垂直的两个方向时,是包容实际直
线且距离为最小的两组平行平面之间的区域。
3)、任意方向上的直线度误差:
包容实际直线且距离为最小的
圆柱体的直径؃。
4、直线度误差的检测方法
按照测量原理、测量器具及测量基准等可将直线度误差的检测方法分为四类:直接方法、间接方法、组合方法和量规检验法。
1)、直接方法:此类方法一般是首先确定一条测量基线,然后通过测量得到实际被测直线上的各点相对测量基线的偏差,再按规
定进行数据处理得到直线度值。
(素线的测量)
(1)、光隙法:将被测实际素线与其理想直线相比较来测量给定平面内直线度误差的测量方法。
是将刀口尺置于被测实际线上并使与被测线
紧密接触,转动刀口尺使它的位置符合最小条件,
然后观察刀口尺与被测线之间的最大光隙,此最大
光隙即为直线度误差。
当光隙较大时,可用量块和塞尺测量其值,光隙较小时,可通过与标准光隙比较,估读
出光隙量大小。
该方法适合于磨削或研磨加工的小平面及短园柱(锥)面的直线度误差的测量。
标准光隙:标准光隙由1级量块、0级刀口尺
和1级平面平晶组成。
光隙尺寸的大小借助于光线通过狭缝时呈现的不同颜色来鉴别。
光隙 >2.5um时,光线呈白光:间隙在 1.25—1.17um时,呈红光:间隙约为0.8um时,呈蓝光;间隙<0.5um时,则不透光。
(2)、打表测量法、拉线基准法(测微法):
用指示表测量零件表面直线度,是一种与理想直线比较,测量给定平面内直线度误差的方法。
(素线的测量)
在被测素线的全长范围内测量,同时记录读数,根据记录的数据。
用计算法按最小条件计算出该条素线的直线度误差。
按上述方法测量若干条素线,取其中最大的误差值做为该被测零件的直线度误差。
标准20页。
2)间接方法:
水平仪法、自准直仪法、(节距法):用小角度测量仪器,如水平仪、自准直仪、合像水平仪等测量直线度,它是将被测直线分成若干小段(节距)测出每段的相对值,经数据处理得出直线度误差,适用于测量较长零件的直线度,如机床导轨纵向直线度误差的测量。
(素线的测量,需进行数据处理)
3)组合测量法:用两顶尖支撑测量圆柱轴线的任意方向的直线度误差。
(轴线的测量)
将被测零件安装在平行于平台的两顶尖之间,
沿铅垂轴截面的两条素线测量,同时记录两指示 表在各测点读数Ma 、Mb ,取各对应测量点读数 差的一半之中最大差值,即max min
2
f ∆-∆=
)。
4)量规检验法:
当按最大实体要求给出轴线的直线度公差时,其最大实体实效边界 可用功能量规来控制,检验孔时用综合塞规,检验轴时用综合环规。
2、直线度误差的评定方法
按国家标准规定,直线度误差的评定方法有:
体现“最小条件”的最小包容区域法、最小二乘法和两端点连线法。
1)最小包容区域法评定时, A 、 在给定的平面内,
有两条直线包容被测的实际直
线,形成三点接触,构成“高——低——高”“低——高——低”的高低相间的形式,则两平行直线间的区域即为最小包容区域。
还可以采用两端点连线法评定。
B、在给定一个方向,
在垂直于给定方向上作两个平行平面,包容实际直线,使两平行平面与实际直线至少有高低相间的三点接触。
C、在任意方向,
由圆柱面来包容实际直线时成3点、4点或5点接触。
3点接触时,
3点在同一轴截面,如图1、3两点沿
轴线方向的投影重合在一起,即1、3
两点在同一条素线上,且2点在1、3两点之间,此时,包容实际线的圆柱面区域为最小区域。
5、直线度误差的数据处理
图解法、旋转法、列表计算法
1)图解法
步骤:
⑴建立坐标系
以横坐标X轴代表各测点的被测长度,纵坐标Y轴代表各测点的累计
⑵描点
按读数值在坐标系上描点。
⑶做出误差折线
依次连接各坐标点
⑷在图上确定直线度误差
两端点连线法:连接误差折线的首位两点,以此直线作为评定基准线,取折线上各点对两端点连线纵坐标距离的最大正值和最大负值的绝对值之和为被测长度的直线度误差值。
最小区域法:将整个误差折线露在最外围的那些点连接成封闭多边形,从中找出具有最大纵坐标距离即为符合最小条件准则的直线度误
差值。
例如、在检验平板上用千分表测量一导轨的直线度误差,指示表的读数为:0,-1,+2,+3,+4,+2,-2,0 m。
则按最小条件求的直线度误差是多少?
解:
按最小条件得直线度误差f=5.6um
2)旋转法
最小区域法步骤:⑴写成测量读数
⑵求出读数累计值
⑶计算坐标旋转量
⑷写出旋转后各测点值
⑸计算旋转后各测点累计值
⑹计算直线度误差
两端点连线法步骤⑴写成测量读数
⑵求出读数累计值
⑶计算各点旋转量
⑷写出旋转后各测点值
⑸计算旋转后各测点
⑹计算直线度误差
例:用0.02mm/m的水平仪测量2M长的导轨,板桥跨距L=250mm,共排8板,读数依次为:0、+5、+5.5、-1、+1、-1、-0.5、+7,试通过数据处理计算导轨的直线度
例如:用自准直仪测量某导轨的直线度,测得的各点读数依次为-20、+10、-30、-30、+30、+10、-30、-20(um)试分别按最小包容区域法、两端点连线法和最小二乘法评定其直线度误差值
解:
按最小包容区域法评定,直线度误差为f=50um
按两端点连线法评定,直线度误差为f=60 um
按最小二乘法评定,求得最小二乘直线的截距为-7,斜率为-8,直线度误差为f=h max-h min,
第4点对最小二乘线的距离hmax=Z4-(-7-8*X4)=-70-(-7-8*4)=-31um
第6点对最小二乘线的距离hmIN=Z6-(-7-8*X6)=-30-(-7-8*6)=+25um
按最小二乘法评定直线度误差值为
f=h max-h min,=-31-(+25)=56um
实用标准
精彩文档 3)列表计算法
将各读数值以数学运算的方法,求出各点到两端点连线得纵坐标距离或两包容线间的距离,得到直线度误差值。
各测点到两端点连线的误差值按下式计算:
11n n
i i i i i i f a a n ===-∑∑ 式中n 为跨距
取个测点误差值中的最大正值和最大负值的绝对值之和,即为被测长度的直线度误差值。
注意:
1)采用水平仪、自准直仪等角度测量仪器测量直线度时,应对原始数据进行累加后,才能做误差曲线图。
2)如所有测量结果均为相对于同一测量基准的坐标值,则无须进行累加,既可作误差曲线图。
3)理想直线可做许多条,应尽量找出符合最小条件的理想直线。
4)符合最小包容区域的判断量取包容区域宽度时,应按坐标方向不变的原则量取,即沿Y 向量取。
5) 轴线的测量结果:取指示表的最大与最小读数差;
素线的测量结果:经过数据处理得到。