四叉树算法
- 格式:pdf
- 大小:273.06 KB
- 文档页数:6
matlab 四叉树表达的迭代区域分裂合并算法
四叉树是一种常用于空间划分和图像处理的数据结构,它可以将空间划分为四个等分的矩形,并对每个矩形进行编号,形成一颗二叉树。
在处理图像时,四叉树可以表示图像的不同颜色区域,从而方便进行区域合并和分裂等操作。
下面介绍一个使用四叉树表示图像区域的迭代区域分裂合并算法。
该算法的基本思想是:首先将图像划分为小区域,并计算每个区域的颜色值;然后根据每个小区域的颜色值分裂或合并区域,直到满足预设的分辨率和颜色差异阈值为止。
具体的算法流程如下:
1. 将图像划分为初始小区域,计算每个区域的颜色值,并构建初始四叉树。
2. 对每个小区域,计算其颜色均值和颜色标准差(用于评估区域内颜色的差异程度)。
3. 如果当前四叉树节点代表的区域中颜色差异大于预设的阈值,将该节点进行区域分裂操作。
具体地,将该节点分成四个等分的子节点,并计算每个子节点的颜色均值和颜色标准差。
4. 如果当前四叉树节点代表的区域中颜色差异小于预设的阈值,将该节点进行区域合并操作。
具体地,将该节点所在的父节点合并成一个区域,并计算该区域
的颜色均值和颜色标准差。
5. 重复步骤3和步骤4,直到满足预设的分辨率和颜色差异阈值为止。
6. 将四叉树中的每个叶节点表示为一个矩形区域,并用对应的颜色值填充该矩形区域,从而得到分割后的图像。
需要注意的是,在实际应用中,由于图像的颜色分布较为复杂,很难确定适当的颜色差异阈值和分辨率,因此需要进行多次实验和调整,以达到最佳效果。
前序四叉树或四元树也被称为Q树(Q-Tree)。
四叉树广泛应用于图像处理、空间数据索引、2D中的快速碰撞检测、存储稀疏数据等,而八叉树(Octree)主要应用于3D图形处理。
对游戏编程,这会很有用。
本文着重于对四叉树与八叉树的原理与结构的介绍,帮助您在脑海中建立四叉树与八叉树的基本思想。
本文并不对这两种数据结构同时进行详解,而只对四叉树进行详解,因为八叉树的建立可由四叉树的建立推得。
四叉树与八叉树的结构与原理四叉树(Q-Tree)是一种树形数据结构。
四叉树的定义是:它的每个节点下至多可以有四个子节点,通常把一部分二维空间细分为四个象限或区域并把该区域里的相关信息存入到四叉树节点中。
这个区域可以是正方形、矩形或是任意形状。
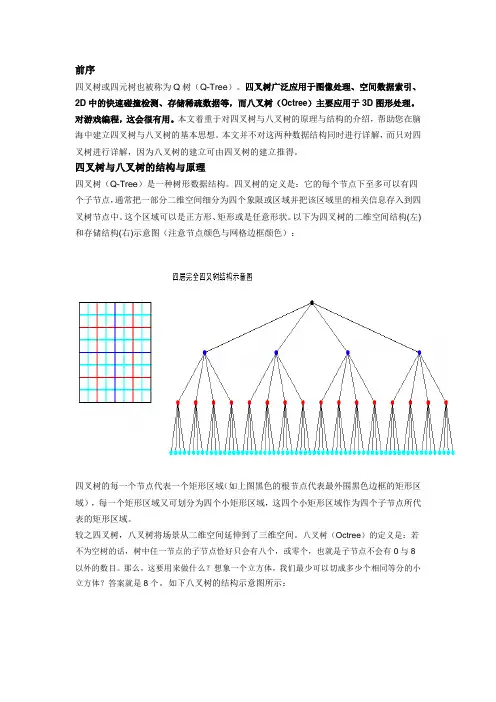
以下为四叉树的二维空间结构(左)和存储结构(右)示意图(注意节点颜色与网格边框颜色):四叉树的每一个节点代表一个矩形区域(如上图黑色的根节点代表最外围黑色边框的矩形区域),每一个矩形区域又可划分为四个小矩形区域,这四个小矩形区域作为四个子节点所代表的矩形区域。
较之四叉树,八叉树将场景从二维空间延伸到了三维空间。
八叉树(Octree)的定义是:若不为空树的话,树中任一节点的子节点恰好只会有八个,或零个,也就是子节点不会有0与8以外的数目。
那么,这要用来做什么?想象一个立方体,我们最少可以切成多少个相同等分的小立方体?答案就是8个。
如下八叉树的结构示意图所示:四叉树存储结构的c语言描述:[cpp]view plaincopy1./* 一个矩形区域的象限划分::2.3. UL(1) | UR(0)4. ----------|-----------5. LL(2) | LR(3)6.以下对该象限类型的枚举7.*/8.typedef enum9.{10. UR = 0,11. UL = 1,12. LL = 2,13. LR = 314.}QuadrantEnum;15.16./* 矩形结构 */17.typedef struct quadrect_t18.{19.double left,20. top,21. right,22. bottom;23.}quadrect_t;24.25./* 四叉树节点类型结构 */26.typedef struct quadnode_t27.{28. quadrect_t rect; //节点所代表的矩形区域29. list_t *lst_object; //节点数据, 节点类型一般为链表,可存储多个对象30.struct quadnode_t *sub[4]; //指向节点的四个孩子31.}quadnode_t;32.33./* 四叉树类型结构 */34.typedef struct quadtree_t35.{36. quadnode_t *root;37.int depth; // 四叉树的深度}quadtree_t;四叉树的建立1、利用四叉树分网格,如本文的第一张图<四层完全四叉树结构示意图>,根据左图的网格图形建立如右图所示的完全四叉树。
四叉树的算法原理四叉树是一种用于解决二维空间数据存储和查询问题的数据结构。
它将空间划分为四个象限,并将数据递归地存储在每个象限中。
四叉树的算法原理包括构建四叉树、查询和插入数据、删除数据等。
四叉树的构建过程是将二维空间不断地划分为四个象限,直到满足某个停止条件。
首先,将整个二维空间看作一个正方形,将其划分为四个等大小的象限。
然后,对于每个象限,如果象限内的数据点个数超过了某个阈值,再对该象限进行进一步的划分;如果未超过阈值,则将数据点存储在该象限中。
如此反复进行,直到达到停止条件,即每个象限内的数据点个数都不超过阈值或达到了最大的划分层数。
在查询数据时,首先将查询范围划分为四个象限,并与四叉树的四个象限进行比较。
如果查询范围与某个象限完全重合,则返回该象限内的所有数据点。
如果查询范围与某个象限不重合,则不需要继续向该象限的子象限进行查询。
如果查询范围与某个象限部分重合,则需要继续向该象限的子象限进行递归查询。
在插入数据时,首先将数据点与四叉树的根节点进行比较。
如果数据点在根节点所占据的范围内,则将数据点插入该节点中。
如果数据点在某个子象限的范围内,则继续递归地将数据点插入该子象限中。
如果数据点不在任何子象限的范围内,则需要对整个四叉树进行扩展,以容纳新的数据点。
在删除数据时,同样需要根据数据点的位置,递归地进行搜索,并将数据点从相应的节点中删除。
如果节点中没有其他数据点,则可以将该节点及其子节点释放,以减少存储空间的占用。
四叉树的优势在于其可以高效地处理空间数据的存储和查询问题。
它可以将二维空间划分为各个象限,并将数据点存储在相应的象限中,从而可以方便地进行数据查询和范围查询。
四叉树还可以应用于多个领域,如计算机图形学、GIS(地理信息系统)等,用于处理地理数据和图像数据。
然而,四叉树也存在一些局限性。
首先,四叉树只适用于二维空间数据的存储和查询,对于更高维度的数据,需要使用其他的数据结构。
其次,四叉树的构建和维护时的时间复杂度较高,特别是当数据点的分布不平衡或分布非常集中时,容易导致四叉树的深度较大,影响操作的效率。
四叉树编码是一种用于二维空间数据的存储和编码方法。
它将一个二维空间划分为四个象限,然后递归地对每个象限进行划分。
这种方法在GIS、图像处理、计算机图形学等领域广泛应用。
常规的四叉树编码方法可以按照以下步骤进行:
1. 根节点的编码:根节点是整个二维空间的代表,其编码通常采用整数表示。
假设整个空间的编码为0,四个象限的编码分别为00、01、10和11。
2. 子节点编码:每个象限被进一步划分为四个更小的子象限,每个子象限的编码由其父节点的编码加上一个特定的偏移量得到。
例如,假设父节点编码为01,其对应四个子节点的编码分别为010、011、100和101。
3. 节点数据存储:每个节点存储其编码以及该节点所代表的区域的数据信息(如坐标、属性等)。
对于叶节点,它们存储的是实际的数据信息;对于非叶节点,它们存储的是子节点的信息。
4. 数据检索:通过目标数据的坐标,可以找到包含该坐标的最低层的叶节点,然后通过路径反转可以得到该坐标对应的编码,从而找到数据。
这种四叉树编码方法的主要优点是它可以有效地表示和检索二维空间中的数据,并且可以很容易地进行空间数据的插入、删除和更新操作。
然而,它的主要缺点是当空间数据分布不均匀时,可能会出现数据存储的不均衡现象。
四叉树编码的原理四叉树编码是一种基于四叉树数据结构的编码方法,用于将离散的二维或三维数据转换为紧凑的表示形式。
在四叉树编码中,原始数据被逐步划分成四个象限,每个象限对应树的一个节点,并且每个节点可以进一步划分为四个象限。
该过程一直持续下去,直到达到满足一些停止条件为止。
1.数据划分:将原始数据空间划分为四个象限,即左上、右上、左下和右下四个子空间。
这样每个象限对应一个节点,初始时整个数据空间即为根节点。
2.判断停止条件:在划分过程中,需要判断是否满足停止条件。
停止条件可以根据需要来定义,常见的停止条件有:达到指定精度级别、区域内数据数量小于等于一些阈值、区域内数据的方差小于等于一些阈值等。
3.编码存储:对于每个节点,可以使用二进制或其他编码方法将该节点的信息进行存储。
常见的编码方式有:使用一个二进制位表示是否存在子节点,使用一个二进制字符串表示节点的象限等。
4.递归划分:如果不满足停止条件,则对当前节点所代表的子空间进行递归划分,即将当前节点划分为四个子节点,并对每个子节点执行步骤1-4通过以上步骤,原始数据空间将被逐步划分成若干个子空间,并对应存储为一棵四叉树。
根据实际需求,可以选择不同的停止条件和编码方式,以达到合理的数据表示和存储效率。
1.紧凑性:四叉树编码将大规模离散数据转换为紧凑的表示形式,可以有效减少存储空间的占用。
2.数据查询效率高:四叉树编码可以通过树结构快速定位到感兴趣的数据节点,提高数据的查询效率。
3.空间适应性好:四叉树编码可以根据数据的空间分布特点进行不规则的划分,适应各种数据的特征。
4.隐式多分辨率:通过停止条件的设定,四叉树编码可以实现多分辨率表示,即不同精度级别的数据可以通过同一棵四叉树进行表示。
然而,四叉树编码也存在一些限制和挑战:1.数据分布不均匀:如果数据分布不均匀,划分结果可能导致一些节点过大或者过小,影响查询的效率和存储的紧凑性。
2.存储空间需求不确定:由于四叉树编码是根据停止条件进行划分的,当停止条件不同或者随着数据的更新而改变时,存储空间的需求也会相应发生变化。
四叉树法算法设计模板及概述说明1. 引言1.1 概述四叉树法是一种常用的算法设计方法,可以有效地处理和管理具有空间关系的数据。
该算法通过将二维空间划分为多个相等大小的象限,并在每个象限上递归地构建子节点来表示和存储数据。
四叉树法在图像处理、地理信息系统、碰撞检测等领域中得到了广泛应用,并展示了出色的性能和效果。
1.2 文章结构本文将从以下几个方面进行讨论:首先,我们将介绍四叉树法算法设计模板的原理解释,包括其核心思想和基本原则;其次,我们将详细描述用于实现四叉树法算法的数据结构设计,包括节点和整体树形结构;然后,我们将介绍算法步骤,包括构建、查询和插入操作;接着,我们将概述四叉树法的背景和概念以及应用领域及其优势;最后,我们将重点讨论四叉树法算法设计中的要点,如分割策略选择、节点数据存储方式选择以及查询和插入操作优化技巧选择。
1.3 目的本文旨在提供一个全面而详细的介绍四叉树法算法设计的指南,以帮助读者深入理解和掌握该算法,并为其在实际应用中提供参考和借鉴。
通过研究本文,读者将能够了解四叉树法算法的原理、数据结构和关键步骤,并具备选择适当策略和技巧来设计高效的四叉树法算法的能力。
以上为文章“1. 引言”部分的内容。
2. 四叉树法算法设计模板:2.1 原理解释:四叉树法是一种空间数据结构,用于处理二维平面上的数据。
它通过将平面划分为四个相等大小的象限,每个象限都可继续划分,以此类推形成递归结构。
每个节点可以代表一个矩形区域,并存储相关的数据。
该算法主要基于以下思想:如果一个区域内的数据过多或过少,那么将其划分成四个子区域能够更有效地组织和查询数据。
通过不断的划分和合并操作,四叉树可以动态地适应不同密度和大小的数据。
2.2 数据结构设计:在四叉树算法中,通常使用节点来表示每个矩形区域。
每个节点包含以下几个重要属性:- 区域范围:描述节点所代表的矩形区域在整个平面上的位置和大小。
- 节点类型:指示节点是否为叶子节点(即没有子节点)还是内部节点(具有四个子节点)。
计算机区域划分算法
1. 四叉树算法,四叉树是一种经典的区域划分数据结构,它将
空间递归地划分为四个象限,每个象限可以继续划分为四个子象限,以此类推。
四叉树算法常用于图像压缩、碰撞检测等领域。
2. 分治法,分治法是一种常见的区域划分算法,它将原始空间
划分为若干个子空间,然后在每个子空间上递归地应用相同的算法,最后将结果合并起来。
这种算法常用于解决规模较大的问题,比如
快速傅里叶变换等。
3. K均值算法,K均值算法是一种聚类算法,它将空间中的点
划分为K个簇,使得每个点都属于离它最近的簇。
这种算法常用于
图像分割、数据挖掘等领域。
4. Voronoi图算法,Voronoi图算法将空间划分为若干个区域,每个区域包含了离它最近的一组点,这种算法常用于解决最近邻搜
索等问题。
5. 动态规划算法,动态规划算法可以用于解决一些区域划分的
优化问题,比如最优路径规划、最优区域覆盖等。
以上是一些常见的计算机区域划分算法,它们在不同的领域和应用中发挥着重要作用。
当选择合适的算法时,需要根据具体的问题需求和性能要求来进行综合考虑。
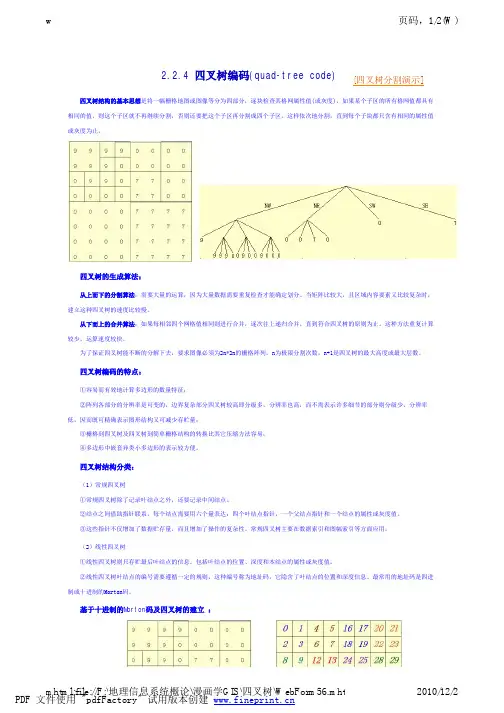
四叉树结构的基本思想是将一幅栅格地图或图像等分为四部分,逐块检查其格网属性值(或灰度),如果某个子区的所有格网值都具有相同的值,则这个子区就不再继续分割,否则还要把这个子区再分割成四个子区。
这样依次地分割,直到每个子块都只含有相同的属性值或灰度为止。
从下而上的合并算法:如果每相邻四个网格值相同则进行合并,逐次往上递归合并,直到符合四叉树的原则为止。
这种方法重复计算较少,运算速度较快。
从上而下的分割算法:需要大量的运算,因为大量数据需要重复检查才能确定划分。
当矩阵比较大,且区域内容要素又比较复杂时,建立这种四叉树的速度比较慢。
②阵列各部分的分辨率是可变的,边界复杂部分四叉树较高即分级多,分辨率也高,而不需表示许多细节的部分则分级少,分辨率低,因而既可精确表示图形结构又可减少存贮量;②结点之间借助指针联系,每个结点需要用六个量表达:四个叶结点指针,一个父结点指针和一个结点的属性或灰度值。
②线性四叉树叶结点的编号需要遵循一定的规则,这种编号称为地址码,它隐含了叶结点的位置和深度信息。
最常用的地址码是四进制或十进制的Morton 码。
①常规四叉树除了记录叶结点之外,还要记录中间结点。
③这些指针不仅增加了数据贮存量,而且增加了操作的复杂性。
常规四叉树主要在数据索引和图幅索引等方面应用。
③栅格到四叉树及四叉树到简单栅格结构的转换比其它压缩方法容易;①容易而有效地计算多边形的数量特征;为了保证四叉树能不断的分解下去,要求图像必须为2n*2n 的栅格阵列,n 为极限分割次数,n+1是四叉树的最大高度或最大层数。
①线性四叉树则只存贮最后叶结点的信息。
包括叶结点的位置、深度和本结点的属性或灰度值。
(1)常规四叉树(2)线性四叉树④多边形中嵌套异类小多边形的表示较方便。
四叉树的生成算法:四叉树结构分类:四叉树编码的特点:基于十进制的Morton 码及四叉树的建立 :2.2.4 四叉树编码(quad-tree code)[四叉树分割演示]十进制的Morton 码实际上是II 、JJ 中的二进制数字交叉结合的结果,即设十进制表示的行、列号在计算机内部的二进制数字分别为:[上一根节][下一根节][回节目录][根节目录]在生成的线性四叉树表中,仍存在前后叶结点的值相同的情况,因而可以采取进一步的压缩表达,即将格网值相同的前后结点合并成一个值,形成二维行程编码(Two Dimensional Run Encoding ,简称 2DRE )表。
四叉树碰撞优化版,速度飞一样原来对四叉树有点恐惧,完全不知道这东西怎么回事,觉得很高级,只好花时间研究了一下,最终效果如下:下面是对四叉树的基本介绍。
懂四叉树的同学可以直接跳过前面看优化部分。
四叉树很简单,就是把一块2d的区域,等分成4份,如下图: 我们把4块区域从右上象限开始编号,逆时针。
[查看图片]接着每份继续等分4份。
[查看图片]一直到我们不需要再继续等分为止。
每次插入对象,对象都在其中一个格子里。
进行碰撞检测的时候,对象只会和他同在一个格子里的以及周围的一些对象进行检测,所以提高了效率。
四叉树的原理大致就是这样,和网格法差不多,简单说就是分格子,检测。
//---------------------------------------------分割线-----------------------------------------------------------//以下部分会对四叉树的实现以及优化进行说明。
下面我们对四叉树进行实现:主要代码复制代码MAX_OBJECTS是每个节点能容纳的最多对象超过则分割4个节点, 我们并不是事先就分好格子,而是在插入对象的时候才进行划分。
MAX_LEVELS是四叉树的最大层数超过则不再划分从根节点开始最多6 层。
level:当前层数objects: 当前节点内的待检测的对象。
bounds 当前节点所表示的2d区域的范围nodes: 4个子节点队列。
构造函数:复制代码分割函数:复制代码如你所见,每次划分节点,都会把父节点的区域对半分。
辅助方法getIndex:复制代码这个方法是返回你所要碰撞检测的矩形在哪块区域(当前节点)。
比如当前区域是Rectange(0, 0, 600, 600) 待检测矩形是Rectangel(0, 0, 30, 30) 那么他就在左上象限index = 1 如果是Rectange(400, 400, 30, 30) 那么他就在右下象限index = 3 请注意,当对象刚好在区域的中心线上的时候,也会返回-1。
四叉树八叉树遍历方法四叉树和八叉树是常用于空间索引、地理信息、计算机图形学等领域的数据结构。
在进行相关算法设计和实现时,树的遍历是一个基本操作。
下面介绍四叉树和八叉树的遍历方法。
四叉树遍历方法:1. 深度优先遍历(DFS):从根节点出发,依次访问每个子节点,直到到达叶子节点。
然后回溯到父节点,继续访问其他子节点。
2. 广度优先遍历(BFS):从根节点出发,依次访问同一层的所有节点,然后再访问下一层的所有节点,直到遍历完整棵树。
3. 前序遍历:先访问根节点,再依次访问左子树和右子树。
4. 中序遍历:先访问左子树,再访问根节点,最后访问右子树。
5. 后序遍历:先访问左子树,再访问右子树,最后访问根节点。
八叉树遍历方法:八叉树的遍历方法和四叉树类似,只是多了几个子节点。
下面列出八叉树的遍历方法:1. 深度优先遍历(DFS):从根节点出发,依次访问每个子节点,直到到达叶子节点。
然后回溯到父节点,继续访问其他子节点。
2. 广度优先遍历(BFS):从根节点出发,依次访问同一层的所有节点,然后再访问下一层的所有节点,直到遍历完整棵树。
3. 前序遍历:先访问根节点,再依次访问左前上、左前下、左后上、左后下、右前上、右前下、右后上和右后下子树。
4. 中序遍历:先访问左前上、左前下、左后上、左后下,然后访问根节点,最后访问右前上、右前下、右后上和右后下子树。
5. 后序遍历:先访问左前上、左前下、左后上、左后下、右前上、右前下、右后上和右后下子树,最后访问根节点。
以上就是四叉树和八叉树的遍历方法,不同的遍历顺序可以满足不同的算法需求。
在实际应用中,需要根据具体的问题选择合适的遍历方法。
四叉树数据结构武汉大学遥感信息工程学院余长慧常规四叉树线性四叉树四叉树分割的基本思想1如果某个子区的所有格网都含有相同的值,则子区不再分割;否则,把子区再分割成四个子区域;把一副图像或一副栅格地图(2k x2k ,k>1)等分成四部分,逐块检查其格网值。
递归分割,直到每个子块都只含有相同的灰度或属性值为止。
12345671112131415191617188910常规四叉树2结点:父结点指针,四个子结点指针,本结点灰度或属性值常规四叉树方法:记录叶结点外,还要记录中间结点;结点之间的联系靠指针表达,也叫指针四叉树。
增加了存储量和操作的复杂性。
3线性四叉树线性四叉树方法:只存储叶结点的信息结点:位置、大小和格网值叶结点的位置信息:遵照一定的规则对叶结点编号,这种编号称为地址码四叉树分解过程3线性四叉树线性四叉树的编码地址码:隐含叶结点的位置信息四进制Morton码十进制Morton码(1)基于四进制的Morton码及四叉树的建立线性四叉树3方法1:自上而下分裂建立四叉树,过程中逐步产生Morton 码方法2:首先计算每个格网的Morton 码,然后扫描自下而上合并,建立四叉树方法1:分解过程(自上而下)第一步01编码方向23方法1:分解过程(自上而下)第二步01 2310111213 2021222330313233方法1:分解过程(自上而下)第二步101112132021 22233031 3233方法1:分解过程(自上而下)第三步101112132021 222330313233303133方法1:分解过程(自上而下)第四步303133方法2:合并方法(自下向上)将二维矩阵元素的下标转换成Morton 地址码四进制Morton 码的计算方法:当>时当时2log ()b k 0(,2)10II kk I MOD I ⎡⎤⎣⎦==∙∑k I II=k 1(/2)K I INT I -=0k = 0k (a )将十进制的行列号转换成二进制数MOD :取余函数,INT :取整函数,II :十进制行号,I b :二进制行号,J b :二进制列号,k :中间循环变量。
叶结点编码四叉树的邻域寻找算法叶结点编码四叉树的邻域寻找算法是一种被用于解决图像处理、计算机视觉等领域的数学运算算法。
编码四叉树是用来描述图像空间结构、表达层次关系的一种空间数据结构。
邻域查询算法是提取空间关系的重要基础,也是编码四叉树的核心部分。
编码四叉树是一种用来表达空间关系的二叉树,它以树形结构表示图像空间的结构和层次关系。
叶结点编码四叉树的叶子节点的编码是由其父节点的编码、四叉树的等级和编号三个部分组成。
该叶结点代表的像素点在空间上的相对位置由其父节点的编码、四叉树的等级和编号确定。
基于叶结点编码四叉树结构,建立了一种叫做叶结点编码四叉树的邻域查找算法。
该算法根据给定像素点的编码信息,去搜索邻域像素点来获取它们的编码信息,以此获取其在空间上的位置和属性特征。
邻域查找算法的基本思路是先检测该像素点的周围像素点的编码,然后根据周围像素点的编码来确定该像素点在空间中的邻域,最后根据给定像素点的编码信息以及邻域像素点的编码信息来计算各个点之间的空间相对位置,从而实现邻域查询。
叶结点编码四叉树邻域查找算法一般有以下几种:1.局搜索法:根据给定像素点的编码信息,在整个编码四叉树中的所有叶节点中搜索所有的邻域。
2.部搜索法:从给定像素点的父节点开始,对编码四叉树进行空间局部搜索,搜索出其邻域的所有叶节点的编码信息。
3.称搜索法:根据给定像素点的编码信息,以查找空间对称的方式去搜索其附近像素点。
4.域搜索法:根据给定像素点的编码信息,以查找它周围的像素点,获取编码信息并确定邻域位置。
叶结点编码四叉树邻域查找算法由于其精确、快速的查询和计算特性,被广泛应用于图像处理、机器视觉等领域,例如图像分割、图像边界检测、图像识别等。
近几年,研究者们开始采用计算机视觉和机器学习的方法来改进叶结点编码四叉树的邻域查找算法,从而提高其准确性和效率。
他们提出了一种叫做卷积神经网络的模型,该模型可以自动学习叶结点编码四叉树的邻域查找算法的特征,从而提高空间位置的预测准确性。
一种存储复杂多边形包含关系的四叉树索引
四叉树是一种用来划分二维空间的树状数据结构,可以用来存储和检索包含关系。
在
存储复杂多边形的包含关系时,可以利用四叉树索引来提高存储和查询的效率。
四叉树是一种将空间划分为四个象限的树结构。
每个节点有四个子节点,每个子节点
对应一个象限。
树的根节点代表整个二维空间,然后通过递归将空间划分为四分之一,并
一直划分下去,直到达到一个最小单位。
在存储复杂多边形的包含关系时,可以根据多边形的边界框来划分空间并构建四叉树。
边界框是一个矩形,包含了多边形的最小外接矩形。
首先找到整个多边形集合的边界框,
然后将边界框划分为四个象限,分别找到每个象限内包含的多边形,并用四叉树的节点来
表示这些多边形。
然后对每个节点再进行递归划分,直到每个叶子节点只包含一个多边
形。
在查询复杂多边形的包含关系时,可以通过四叉树索引来提高查询效率。
首先找到查
询多边形的边界框,然后判断边界框与四叉树节点的相交关系。
如果边界框与节点不相交,则可以跳过该节点及其子节点,不需要进一步的遍历。
如果边界框与节点相交,则需要继
续对子节点进行检查,直到达到叶子节点。
最后可以检查叶子节点内的多边形是否与查询
多边形相交,从而确定是否包含。
四叉树索引可以大大减少查询的次数,提高查询的效率。
因为每个节点都代表了一个
空间区域,所以通过判断边界框的相交关系可以快速排除不相关的节点。
四叉树索引对于
复杂多边形的包含关系的查询也非常高效,因为每个叶子节点只包含一个多边形,不需要
进行进一步的判断。
四叉树编码例题详细讲解四叉树编码是一种树形结构编码方法,用于表示维平面区域的数据。
其基本原理是将维平面分割成四个象限,然后递归地对每个象限进行类似的分割,直到达到所需的精度或达到终止条件。
以下是一个四叉树编码的详细讲解:1.确定终止条件:首先需要确定四叉树编码的终止条件。
通常,当一个象限中的所有数据点都位于同一类别或满足某种相似性条件时,就可以停止分割。
2.初始化四叉树:将整个二维平面作为根节点并初始化为一个空的四叉树。
3.遍历数据点:遍历所有的数据点对于每个数据点,根据其类别或特征,将其分配到相应的子节点中。
如果该子节点不存在,则创建该子节点。
4.递归分割:对于每个非叶节点,递日地将其分割成四个子节点,每个子节点表示该节点所在象限的数据。
如果满足终止条件,则停止分割;否则,继续递归分割。
5.编码:对于每个叶节点,根据其所在的象限和深度进行编码。
通常采用二进制编码方式,例如对于第k层的第1个叶节点,可以将其编码为00..000k06.解码:对于给定的编码,从根节点开始根据编码的位数依次判断其所在的象限和深度,从而找到对应的叶节点以下是一个简单的四叉树编码示例:输入数据点集为{(1.1)(2.2(3.1)(4.2)(5.3)(6.3)}中类别为1的数据点(1.1)(2.2)(3.1]。
类别为2的数据为(4,2)(5,3)(6,3).根据四叉树编码的步骤:1.初始化四叉树,将整个二维平面作为根节点。
2.遍历数据点,将数据点分配到根节点的两个子节点中,一个子节点表示类别为1的数据点另一个子节点表示类别为2的数据点。
3.递归地对每个非叶节点进行分割,直到满足终止条件。
4.对每个叶节点进行编码,例如第k层的第个叶节点可以编码为.00.00k0r5.对给定的编码进行解码,找到对应的叶节点。
在实际应用中,四叉树编码常用于图像处理、地理信息系统等领域中,用于表示和压缩二维空间的数据。
空间索引-四叉树前⾔作为程序员,应该都对⼆叉树都不陌⽣,我们都知道⼆叉树的变体⼆叉查找树,⾮常适合⽤来进⾏对⼀维数列的存储和查找,可以达到 O(logn) 的效率;我们在⽤⼆叉查找树进⾏插⼊数据时,根据⼀个数据的值和树结点值的对⽐,选择⼆叉树的两个叉之⼀向下,直到叶⼦结点,查找时使⽤⼆分法也可以迅速找到需要的数据。
但⼆叉树只⽀持⼀维数据,如⼀个标量数值,对地图上的位置点这种有xy两个⽅向上的信息却⽆能为⼒,那么是否有⼀种树能够⽀持⼆维数据的快速查询呢?四叉树介绍四元树⼜称四叉树是⼀种树状数据结构,在每⼀个节点上会有四个⼦区块。
四元树常应⽤于⼆维空间数据的分析与分类。
它将数据区分成为四个象限。
今天要介绍的四叉树可以认为是⼆叉查找树的⾼维变体,它适合对有⼆维属性的数据进⾏存储和查询,当然四叉树存储的也不⼀定是⼆维数据,⽽是有着⼆维属性的数据,如有着 x,y 信息的点,⽤它还可以⽤来存储线和⾯数据。
它有四个叉,在数据插⼊时,我们通过其⼆维属性(⼀般是 x,y)选择四个叉之⼀继续向下,直⾄叶⼦结点,同样使⽤“四分法”来迅速查找数据。
四叉树的⼀般图形结构如下:聪明的⼩伙伴⼀定想到了适合存储和查询三维数据的⼋叉树,它们原理是⼀致的,不过我们暂不讨论。
分类四叉树常见的应⽤有图像处理、空间数据索引、2D中的快速碰撞检测、稀疏数据等,今天我们很纯粹地只介绍它在空间索引⽅⾯的应⽤。
根据其存储内容,四叉树可以分为点四叉树、边四叉树和块四叉树,今天我们实现的是点四叉树。
根据其结构,四叉树分为满四叉树和⾮满四叉树。
对于满四叉树,每个节点都有四个⼦结点,它有着固定的深度,数据全都存在最底层的⼦结点中,进⾏数据插⼊时不需要分裂。
满四叉树在确定好深度后,进⾏插⼊操作很快,可是如果⽤它来存储下图所⽰数据,我们会发现,四叉树的好多叉都是空的,当然它们会造成内存空间的⼤量浪费。
⾮满四叉树解决了此问题,它为每个结点添加⼀个“容量”的属性,在四叉树初始化时只有⼀个根结点,在插⼊数据时,如果⼀个结点内的数据量⼤于了结点“容量”,再将结点进⾏分裂。