条件平差中必要观测数的确定
- 格式:pdf
- 大小:452.66 KB
- 文档页数:6


由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。
因此,问题的关键是判定必要观测数t。
1.网中有2个或2个以上已知点的情况三角网中有2个或2 个以上已知三角点,就一定具备了4个必要起算数据。
无论是测角网、测边网还是边角同测网,如果有2个已知点相邻,要确定一个未知点的坐标,需要观测两个观测值(2个角,或者1条边和1个角,或者2条边)。
也就是说,确定1个未知点要有2个必要观测值;那么如果网中有p个未知点,必要观测数应等于未知点个数的两倍。
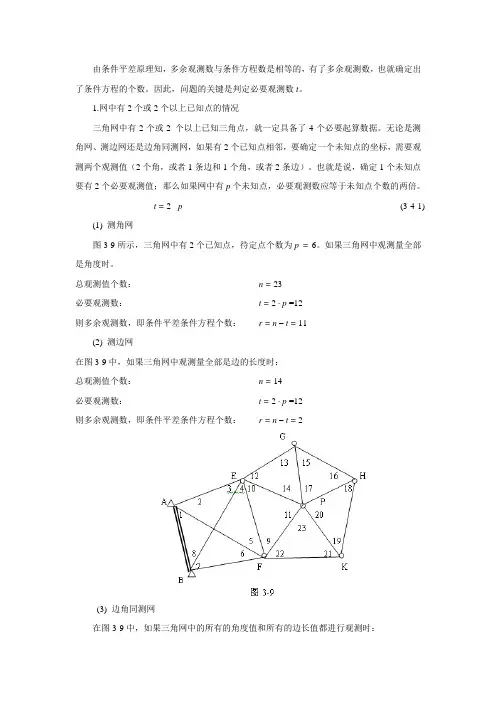
t = 2 ·p(3-4-1)(1) 测角网图3-9所示,三角网中有2个已知点,待定点个数为p =6。
如果三角网中观测量全部是角度时。
总观测值个数:n = 23必要观测数:t = 2 · p =12则多余观测数,即条件平差条件方程个数:r = n – t = 11(2) 测边网在图3-9中,如果三角网中观测量全部是边的长度时:总观测值个数:n = 14必要观测数:t = 2 · p =12则多余观测数,即条件平差条件方程个数:r = n – t = 2(3) 边角同测网在图3-9中,如果三角网中的所有的角度值和所有的边长值都进行观测时:总观测值个数:n = 37必要观测数:t = 2 · p =12则多余观测数,即条件平差条件方程个数:r = n – t = 252. 网中已知点少于2个的情况有些情况下,三角网中已知点可能少于2个,只有1个已知点、1个已知边和1个已知方位角,或者没有已知点和已知方位角只有1个已知边。
但是,不管怎样说,1条已知边是必须已知的,或者需要进行观测的。
如果没有已知点,可以假定网中的1个未知点;如果没有已知方位角,可以取网中的1个方向的方位角为某一假定值。
这样也就间接地等价于网中有2个相邻点的坐标是已知的。
(1) 测角网三角网中共有p个三角点、1个已知方位角(也可以没有)、1个已知点(也可以没有已知点)和1个已知边长S(或者也是观测得到的),并观测了所有的角度。
条件方程(一)、水准网1、水准网的分类及水准网的基准分为有已知点和无已知点两类。
要确定各点的高程,需要1个高程基准。
2.水准网中必要观测数t的确定有已知点:t等于待定点个数无已知点:t等于总点数减一3、水准网中条件方程的列立方法列条件方程的原则:1、足数; 2、独立;3、最简(1)、先列附合条件,再列闭合条件(2)、附合条件按测段少的路线列立,附合条件的个数等于已知点的个数减一(3)、闭合条件按小环列立(保证最简),一个水准网中有多少个小环,就列多少个闭合条件在水准网条件平差中,按以上方法列条件方程,一定能满足所列条件方程足数、独立、最简原则。
边角网条件方程单一附合导线的条件方程一个方位角条件两个坐标条件纵坐标条件为所以纵坐标条件方程为:纵坐标条件方程的最终形式为:GPS基线向量网三维无约束条件平差1.GPS基线向量网的观测值2、GPS基线向量网三维无约束平差的基准及必要观测数t3、GPS基线向量网三维无约束平差的条件方程的列立GIS数字化数据采集中,折角均为90°的N边形的条件方程直角条件:小结:一、条件平差及其目的二、条件平差的原理三、总结了条件平差的步骤(1)根据具体问题列条件方程式;(2)组成法方程式,(3)解法方程;(4)计算改正数V,(5)求观测值的平差值(6)检核(7)精度评定附有参数的条件平差小结1、为了某种需要,选择参数;2、每选一个参数,就增加一个条件方程,选择u 个参数,就增加u 个条件方程;3、条件方程的总数c=r+u ;4、单位权中误差的计算公式不变;5、求平差值函数的中误差时,应将平差值函数分别对观测值的平差值和参数求偏导数。
间接平差三、选取参数的个数和原则1、所选取t个待估参数必须相互独立;2、所选取t个待估参数与观测值的函数关系容易写出来。
四、不同情况下的误差方程1、水准网误差方程2、方位角误差方程测方位坐标平差函数模型测角网函数模型3、测边网误差方程4、GPS网误差方程。
测量平差中条件方程类型确定的分析作者:泥立丽王永来源:《商情》2020年第33期【摘要】给出了测量平差问题中各类条件方程的确定方法。
在测角三角网的平差中,正确无误地确定各类条件方程是一个难点问题。
文中通过精选的四个测角三角网,从如何确定几何模型的类型、如何确定布网的目的、如何确定起算数据以及如何确定必要观测数等几个方面,分步骤地进行了详细的分析,并给出了思路。
文中给出的方法,简单易行,不容易出错,适合于大多数的初学者和普通测量工作者。
【关键词】几何模型;起算数据;必要观测数;条件方程在测量平差的教学工作中,对于一个几何模型,当确定了必要观测数后,就可以确定多余观测数并依此列出各种条件方程了。
条件方程的类型非常多,包括图形条件、圆周条件、极条件以及坐标方位角条件等。
如何正确地列出相应的条件方程是学生学习的一个难点,本文中,作者结合教学的实际精选了四个测角三角网,并给出了一些分析思路。
1 算例如图1至图4所示,为四个测角三角网,求下列各测角三角网按条件平差时条件方程的总数及各类条件的个数,其中Pi为待定点,i为已知边,i为已知方位角,i取非负整数。
2 分析思路2.1大体分析思路(1)确定几何模型的类型即根据三角网的观测值来确定它是测角三角网、测边三角网还是边角网。
如图1至图4均为测角三角网。
(2)确定布设三角网的目的即布设三角网是为了确定网的形状还是待定点的坐标。
如图1中,其已知数据包括两个已知点坐标、一个已知方位角,可知该网是为了确定待定点的坐标;图2中,没有已知点,但包括两条已知边长,因此该网是为了确定形状和大小,由于大小固定的网是形状不变时的一种特例,因此该网的最终目的是为了确定形状。
图3中,没有已知点,仅包括一条已知边长和两个坐标方位角,因此该网是为了确定形状。
图4中,包括3个已知点,因此该网最终目的是为了确定待定点的坐标。
(3)判断已知数据是否为起算数据已知数据未必是起算数据。
在观测网中,为了实现布网的最终目的,已知数据是否起作用需要进行判断。
测量平差中必要观测数的确立发表时间:2019-05-23T11:22:33.057Z 来源:《防护工程》2019年第1期作者:王鸿燕1 曹学伟1 崔素芳1[导读] 本文讨论了各种情况下必要观测数的个数,并对各种情况下的必要观测数进行了归纳,使用起来很方便。
山东农业工程学院国土资源与测绘工程学院山东济南 250100摘要:测量平差中,为确定必要观测数,针对常见的四类控制网分别列出公式,最后作了归纳。
关键词:平差;必要观测;控制网Abstract:surveying adjustment, in order to determine the necessary number of observations, formulas for four kinds of common control networks are listed and summarized.Adjustment:necessary observation; control network.1引言测量平差是依据某种最优化准则,由一系列带有观测误差的测量数据,求定未知量的最佳估值及精度的理论和方法。
平差的函数模型有四类:条件平差模型、附有参数的条件平差函数模型、间接平差和附有限制条件的间接平差。
其中,除条件平差没设定参数外,其它模型均设定了参数,参数的个数与必要观测具有特定的关系,本文针对不同观测条件、不同图形条件下必要观测数的确定讨论一些公式。
2多余观测数的计算及必要观测数下面是对涉及的几个相关概念、文中的一些符号规定以及多余起算数据的计算问题做的说明和简析[1-5]。
必要观测元素和必要观测数:能够唯一确定一个几何模型所必要的元素,称为必要元素。
必要元素的个数称为必要观测个数或必要观测数,用t表示。
多余观测元素和多余观测数:从总观测元素中去掉必要观测元素后,剩下的观测元素称为多余观测元素或多余观测数据。
多余观测元素的个数,称为多余观测数,用r表示,且r=n-t。
必要观测数确定(平差讲课⽤)测量平差中必要观测数的确定⽅法⼀、控制⽹必要起算数据概述1.控制⽹必要起算数据的要求:见下表。
控制⽹种类必要起算数据个数必要起算数据种类⽔准⽹测⾓⽹测边⽹/边⾓⽹/导线⽹143⼀点⾼程两点坐标或⼀点坐标、⼀边长和⼀边⽅位⾓⼀点坐标和⼀边⽅位⾓2.平差计算时控制⽹的起算数据必须满⾜要求也就是说,确定必要观测数t时,控制⽹的起算数据⼀定已经满⾜了要求。
满⾜要求的起算数据不仅种类满⾜要求,且其个数⼀定等于或⼤于其必要起算数据的个数。
起算数据满⾜要求有两种情况:⼀是控制⽹的起算数据本⾝就满⾜要求;另⼀是控制⽹的起算数据本⾝不满⾜要求,经假定或实测补⾜后满⾜要求。
补充的起算数据也视为已知。
⼆、控制⽹必要观测数的计算⽅法起算数据可分为两类:⼀类是点位起算数据,如坐标、⾼程等;另⼀类是⾮点位起算数据,常见为平⾯控制⽹中的⽅位⾓、边长等。
⽔准⽹中⽆此类起算数据。
下⾯分别就这两种情况来讨论必要观测数t的确定。
1.起算数据只含点位起算数据,不含⾮点位起算数据。
显然,⽔准⽹的必要观测数t就是此类未知点(⾼程)的个数;⽽平⾯控制⽹的必要观测数就是此类未知点坐标的个数,也即为点数的2倍。
若以P表⽰控制⽹中未知点的个数,则此种情况下必要观测数t的计算⽅法为⽔准⽹:t=P平⾯控制⽹:t=2P2.起算数据既含有点位起算数据,⼜包含⾮点位起算数据。
包含⾮点位起算数据只有平⾯控制⽹。
这类数据都对应着⼀条边——有两个端点。
根据该边与控制⽹的连接情况,⾮点位起算数据⼜分为两类:⼀类是两端点都包含在控制⽹内部,如图5中的S0、α1、α2,图7中的α0,图9中的α1等,称为第⼀类⾮点位起算数据。
另⼀类是⼀端与控制⽹相连,⼀端⾃由,该边好像悬挂于控制⽹上,⼀般为已知⽅位⾓,如图6中的α0,图9中的αA、αB、αC等,称为第⼆类⾮点位起算数据或悬挂边。
如果假设⾮点位起算数据未知,也即⽹中只有点位起算数据。
则可看出:第⼀类⾮点位起算数据与确定未知点坐标有关:确定未知点坐标需要测定⽅位⾓、距离。