计算机控制系统的稳态误差
- 格式:doc
- 大小:69.25 KB
- 文档页数:4
稳态误差的总结分析和例解控制系统稳态误差是系统控制准确度的一种度量,通常称为稳态性能。
只有当系统稳定时,研究稳态误差才有意义,对不能稳定的系统,根本不存在研究稳态误差的可能性。
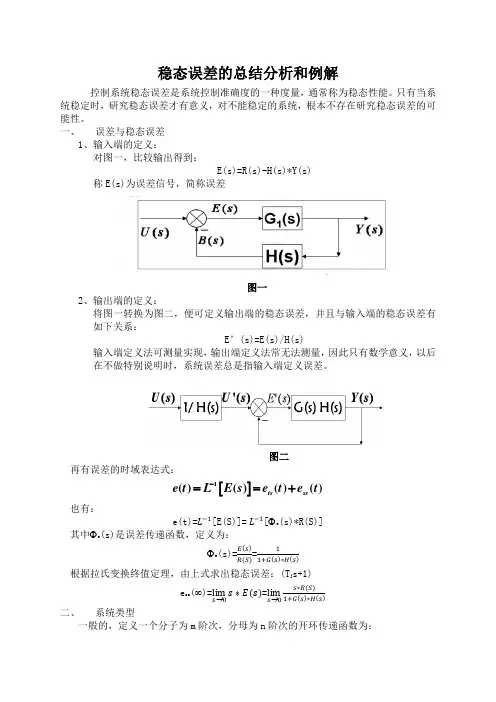
一、 误差与稳态误差1、输入端的定义:对图一,比较输出得到:E(s)=R(s)-H(s)*Y(s)称E(s)为误差信号,简称误差图一2、输出端的定义:将图一转换为图二,便可定义输出端的稳态误差,并且与输入端的稳态误差有如下关系:E ’(s)=E(s)/H(s)输入端定义法可测量实现,输出端定义法常无法测量,因此只有数学意义,以后在不做特别说明时,系统误差总是指输入端定义误差。
图二再有误差的时域表达式:也有:e(t)= [E(S)]= [Φe (s)*R(S)]其中Φe (s)是误差传递函数,定义为:Φe (s)==根据拉氏变换终值定理,由上式求出稳态误差:(T j s+1)e ss (∞)= =二、 系统类型一般的,定义一个分子为m 阶次,分母为n 阶次的开环传递函数为:[]1()()()()ts ss e t L E s e t e t -==+G(S)H(S)=K为开环增益,ν表示系统类型数,ν=0,表示0型系统;ν=1表示Ⅰ型系统;当ν大于等于2时,除了符合系统外,想使得系统稳定相当困难。
四、阶跃输入下的ess(∞)与静态位置误差系数Kpr(t)=R*1(t),则有:ess (∞)=νν用Kp表示静态位置误差系数:ess(∞)==其中: Kp=且有一般式子:Kp=ν∞ν五、斜坡输入下的ess(∞)与静态速度误差系数Kvr(t)=Rt,则有:ess (∞)=ν用Kv表示静态速度误差系数:ess(∞)==其中: Kv=六、加速度输入下的ess(∞)与静态加速度误差系数Kar(t)=Rt2/2,则有: ess (∞)=ν、用Kv表示静态速度误差系数: ess(∞)==其中: Kv=且有: Ka=、七、扰动状况下的稳态误差系统的模型如图三所示对扰动状况下的稳态误差仍然有输入端与输出端的两种定义:图三1、输入端定义法:扰动状况下的系统的稳态误差传递函数:由拉氏变换终值定理,求得扰动状况下的稳态误差为:2、输出端定义法:212()'()0()()1()()()G s E s Y s N s G s G s H s =-=-+记Φe (s) =为误差传递函数,其中G(s)为:G(s)=G 1(s)*G 2(s)*H(s)八、减小或者消除稳态误差的措施: (1)保证系统中各个环节(或元件),特别是反馈回路中元件的参数具有一定的精度和恒定性;(2)对输入信号而言,增大开环放大系数(开环增益),以提高系统对给定输入的跟踪能力;(3)对干扰信号而言,增大输入和干扰作用点之间环节的放大系数(扰动点之前的前向通道增益),有利于减小稳态误差;(4)增加系统前向通道中积分环节数目,使系统型号提高,可以消除不同输入信号时的稳态误差。
3-7 稳态误差分析控制系统在输入信号作用下,其输出信号中将含有两个分量。
其中一个分量是暂态分量。
它反映控制系统的动态性能,是控制系统的重要特性之一。
对于稳定的系统,暂态分量随着时间的增长而逐渐消失,最终将趋于零。
另一个分量称为稳态分量。
它反映控制系统跟踪输入信号或抑制扰动信号的能力和准确度,它是控制系统的另一个重要特性。
对于稳定的系统来说,稳态性能的优劣一般是根据系统反应某些典型输入信号的稳态误差来评价的。
因此,本节着重建立有关稳态误差的概念。
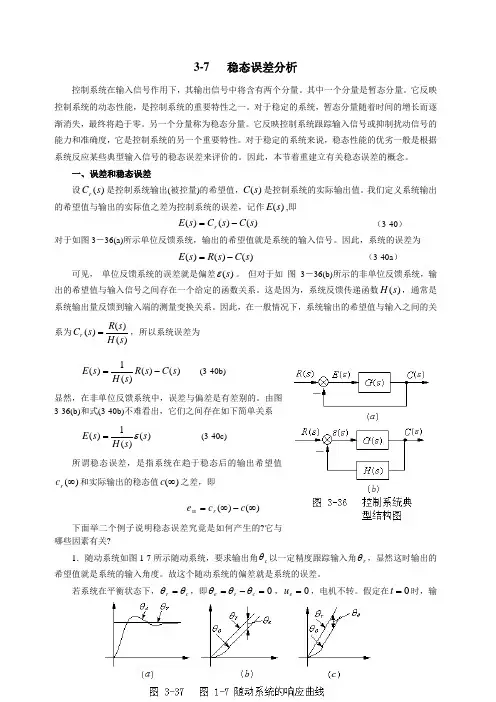
一、误差和稳态误差设)(s C r 是控制系统输出(被控量)的希望值,)(s C 是控制系统的实际输出值。
我们定义系统输出的希望值与输出的实际值之差为控制系统的误差,记作)(s E ,即)()()(s C s C s E r -= (3-40)对于如图3-36(a)所示单位反馈系统,输出的希望值就是系统的输入信号。
因此,系统的误差为)()()(s C s R s E -= (3-40a )可见, 单位反馈系统的误差就是偏差)(s ε。
但对于如 图 3-36(b)所示的非单位反馈系统,输出的希望值与输入信号之间存在一个给定的函数关系。
这是因为,系统反馈传递函数)(s H ,通常是系统输出量反馈到输入端的测量变换关系。
因此,在一般情况下,系统输出的希望值与输入之间的关 系为)()()(s H s R s C r =,所以系统误差为)()()(1)(s C s R s H s E -= (3-40b)显然,在非单位反馈系统中,误差与偏差是有差别的。
由图3-36(b)和式(3-40b)不难看出,它们之间存在如下简单关系)()(1)(s s H s E ε=(3-40c)所谓稳态误差,是指系统在趋于稳态后的输出希望值)(∞r c 和实际输出的稳态值)(∞c 之差,即)()(∞-∞=c c e r ss下面举二个例子说明稳态误差究竟是如何产生的?它与哪些因素有关?1.随动系统如图1-7所示随动系统,要求输出角c θ以一定精度跟踪输入角r θ,显然这时输出的希望值就是系统的输入角度。
自动控制原理稳态误差稳态误差是自动控制系统中一个非常重要的概念,它直接关系到系统的稳定性和准确性。
在控制系统中,我们经常会遇到一些误差,这些误差可能会影响系统的性能和稳定性。
因此,了解稳态误差的概念和计算方法对于控制系统的设计和分析都非常重要。
首先,我们来看一下稳态误差的定义。
稳态误差是指系统在稳定工作状态下,输出信号与期望值之间的差异。
换句话说,当输入信号保持不变时,系统输出与期望输出之间的偏差就是稳态误差。
稳态误差通常用于衡量系统的准确性和稳定性,它是评价控制系统性能的重要指标之一。
接下来,我们来看一下稳态误差的分类。
在自动控制系统中,稳态误差可以分为四种类型,静态误差、动态误差、稳态误差和瞬态误差。
静态误差是指系统在稳定工作状态下,输出信号与期望值之间的偏差;动态误差是指系统在工作过程中,输出信号与期望值之间的波动;稳态误差是指系统在长时间工作后,输出信号与期望值之间的偏差;瞬态误差是指系统在瞬时工作过程中,输出信号与期望值之间的偏差。
这四种误差类型各有特点,对于控制系统的设计和分析都有着重要的意义。
然后,我们来看一下稳态误差的计算方法。
在实际工程中,我们通常会用一些指标来衡量系统的稳态误差,比如静态误差增益、动态误差增益、稳态误差增益和瞬态误差增益等。
这些增益值可以帮助我们更好地了解系统的稳定性和准确性,从而指导控制系统的设计和分析工作。
最后,我们来看一下如何通过调节控制系统的参数来减小稳态误差。
在实际工程中,我们通常会通过调节控制系统的参数来改善系统的稳定性和准确性。
比如,可以通过增加控制器增益、改变控制器结构、优化控制器参数等方法来减小系统的稳态误差。
通过这些方法,我们可以更好地提高控制系统的性能和稳定性,从而更好地满足工程实际应用的需求。
总之,稳态误差是自动控制系统中一个非常重要的概念,它直接关系到系统的稳定性和准确性。
了解稳态误差的概念和计算方法对于控制系统的设计和分析都非常重要。
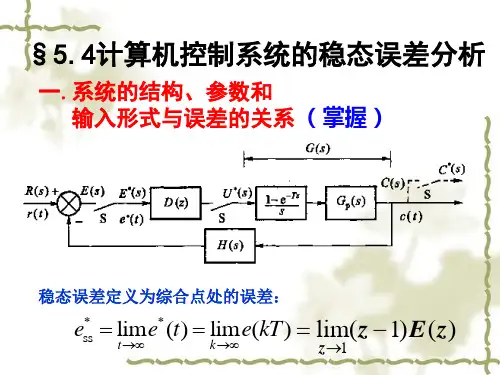
计算机控制系统的稳态误差在连续系统中,稳态误差的计算可以通过两种方法进行:一种是建立在拉氏变换终值定理基础上的计算方法,可以求出系统的终值误差;另一种是从系统误差传递函数出发的动态误差系数法,可以求出系统动态误差的稳态分量。
这两种计算稳态误差的方法,在一定条件下可以推广到离散系统。
由于离散系统没有唯一的典型结构形式,所以误差脉冲传递函数也给不出一般的计算公式。
离散系统的稳态误差需要针对不同形式的离散系统来求取。
这里仅介绍利用z变换的终值定理方法,求取误差采样的离散系统在采样瞬时的终值误差。
设单位反馈误差采样系统如图4.12所示。
其中G(s)为连续部分的传递函数,e(t)为系统连续误差信号,e*(t)为系统采样误差信号,其z变换函数为(1)其中(2)为系统误差脉冲传递函数。
图1 单位反馈误差采样离散系统如果Φe(z)的极点(即闭环极点)全部严格位于z平面的单位圆内,即若离散系统是稳定的,则可用z变换的终值定理求出采样瞬时的终值误差(3)上式表明,线性定常离散系统的稳态误差,不但与系统本身的结构和参数有关,而且与输入序列的形式及幅值有关。
除此之外,离散系统的稳态误差与采样周期的选取也有关。
上式只是计算单位反馈误差采样离散系统的基本公式,当开环脉冲传递函数G(z)比较复杂时,计算e(∞)仍有一定的计算量,因此希望把线性定常连续系统中系统型别及静态误差系数的概念推广到线性定常离散系统,以简化稳态误差的计算过程。
前面的分析中我们指出,零阶保持器的引入并不影响开环系统脉冲传递函数的极点。
因此,脉冲传递函数G(z)的极点与相应的连续函数G(s)的极点是一一对应的。
如果G(s)有v个s=0的极点,即v个积分环节,则由z变换算子z=esT关系式可知,与G(s)相应的G(z)必有v个z=1的极点。
在离散系统中,也可以把开环脉冲传递函数G(z)具有z=1的极点数v作为划分离散系统型别的标准,与连续系统类似地把G(z)中v=0,1,2,…的系统,称为0型,Ⅰ型和Ⅰ离散系统等。
计算机控制系统报告
--计算机控制系统的稳态误差
在计算机控制系统中存在稳态误差。
怎样计算稳态误差呢?
在连续系统中,稳态误差的计算可以通过两种方法计算:一是建立在拉氏变换中值定理基础上的计算方法,可以求出系统的终值误差;另一种是从系统误差传递函数出发的动态误差系数法,可以求出系统动态误差的稳态分量。
在离散系统中,根据连续系统稳态误差的两种计算方法,在一定的条件下可以推广到离散系统。
又由于离散系统没有唯一的典型结构形式,离散系统的稳态误差需要针对不同形式的离散系统来求取。
书上主要介绍了利用z 变换的终值定理方法,求取误差采样的离散系统在采样瞬时的终值误差。
设单位反馈误差采样系统如图4.12所示。
图4.12 单位反馈误差采样反馈系统
系统误差脉冲传递函数为
(4.1)
若离散系统是稳定的,则可用z 变换的终值定理求出采样瞬时的终值误差
(4.2)
Φ==+e ()1()()1()E z z R z G z )](1[)()1(lim )()1(lim )(lim )(1111*z G z R z z E z t e e z z t +-=-==∞-→-→∞
→
(4.2)式表明,线性定常离散系统的稳态误差,不但与系统本身的结构和参数有关,而且与输入序列的形式及幅值有关。
除此之外,离散系统的稳态误差与采样系统的周期的选取也有关。
上式只是计算单位反馈误差采样离散系统的基本公式,当开环脉冲传递函数G(z)比较复杂时,计算e(∞)仍然有一定的计算量,因此希望把线性定常连续系统中系统型别及静态误差系数的概念推广到线性定常离散系统,以简化稳态误差的计算过程。
在离散系统中,把开环脉冲传递函数G(z)具有z=1的极点数v 作为划分离散系统型别的标准,与连续系统类似地把G(z)中
v=0,1,2,…的系统,称为0型,Ⅰ型和Ⅱ型离散系统等。
下面讨论不同类别的离散系统在三种典型输入信号作用下的稳态误差,并建立离散系统静态误差系数的概念。
1.单位阶跃输入时的稳态误差
对于单位阶跃输入r(t)=1(t),其z 变换函数为
(4.3)
得单位阶跃输入响应的稳态误差 (4.4)
上式代表离散系统在采样瞬时的终值位置误差。
式中
(4.5)
称为静态位置误差系数。
若G(z)没有z=1的极点,则Kp ≠∞,从而e(∞)≠0;若G(z)有一个或一个以上z=1的极点,则Kp= ∞,从1
11)(--=z z R →∞==+1p 11()lim 1()z e G z K →=+p 1lim[1()]z K G z
而e(∞)=0,因而在单位阶跃函数作用下,0型离散系统在采样瞬时存在位置误差;I 型或I 型以上的离散系统,在采样瞬时没有位置误差,这与连续系统相似。
2.单位速度输入时的稳态误差
对于单位速度输入r(t)=t ,其z 变换函数为
(4.6)得单位速度输入响应的稳态误差
(4.7)
上式代表离散系统在采样瞬时的终值速度误差。
式中 (4.8)
称为静态速度误差系数。
因为0型系统的Kv=0;I 型系统的Kv 为有限值;II 型或II 型以上的系统Kv=∞。
因而在单位速度函数作用下,0型离散系统在采样瞬时稳态误差无穷大,I 型离散系统在采样瞬时存在速度误差;II 型或II 型以上的离散系统,在采样瞬时不存在稳态误差。
3.单位加速度输入时的稳态误差
对于单位加速度输入r(t)=t2/2,其z 变换函数为
(4.9) 得单位速度输入响应的稳态误差
211
)1()(---=z Tz z R ---→→∞===-+-11111()lim lim (1)[1()](1)()z z v Tz T T e z G z z G z K )()1(lim 11z G z K z v -→-=31112)1(2)1()(----+=z z z T z R
(4.10) 上式代表离散系统在采样瞬时的终值加速度误差。
式中
(4.11) 称为静态加速度误差系数。
因为0型及I 型系统Ka=0;II 型系统的Ka 为常值;III 型及III 型以上系统Ka=∞。
因而,0型和I 型离散系统不能承受单位加速度函数作用;II 型离散系统在单位加速度信号作用下存在加速度误差;只有III 型或III 型以上的离散系统,在采样瞬时不存在稳态误差。
不同型别单位反馈离散系统的稳态误差见表1. 表1 单位反馈离散系统的稳态误差
系统型别 位置误差 r (t )=1(t )
速度误差 r (t )=t 加速度误差 r (t )=t*t/2 0型
1/Kp ∞ ∞ I 型
0 T/Kv ∞ II 型
0 0 T*T/Ka III 型 0 0 0
通过对本节的学习,我们掌握了系统稳态误差的计算。
对于连续系统,可以通过两种方法进行计算稳态误差;对于离散系统的稳态误差的计算需要进行不同形式的离散系统来求取。
并且学习到不同类型的离散系统在三种典型输入信号(单位阶跃输入,单位速度输入和单位加速度输入)作用下的稳态误差。
21122
121211a (1)()lim lim 2(1)[1()](1)()z z T z z T T e z G z z G z K ----→→+∞===-+-12a 1lim(1)()z K z G z -→=-。