系统稳态误差的计算
- 格式:ppt
- 大小:609.00 KB
- 文档页数:10
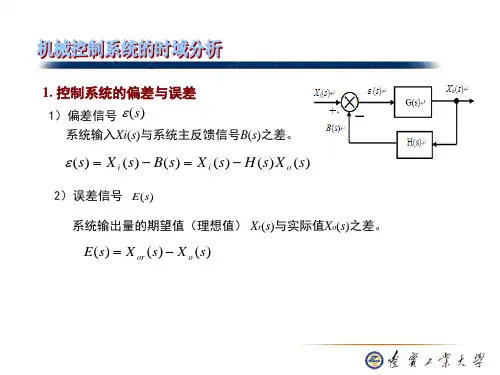
已知闭环传递函数求稳态误差已知闭环传递函数求稳态误差1. 引言在控制系统理论中,闭环传递函数是一个非常重要的概念。
其描述了控制系统在反馈作用下的动态特性,对于系统的稳定性和性能有着至关重要的影响。
而稳态误差则是评价系统性能的重要指标之一,通过已知闭环传递函数求稳态误差,可以帮助我们更好地评估和优化控制系统的性能。
2. 已知闭环传递函数的稳态误差求解当我们已知系统的闭环传递函数时,可以通过以下步骤来求解系统的稳态误差。
2.1 我们需要确定系统的类型。
系统的类型可以通过观察传递函数的分母阶数来确定,一般而言,系统类型等于传递函数的分母阶数减去传递函数的分子阶数。
在控制系统中,常见的类型包括类型0、类型1和类型2。
2.2 接下来,根据系统的类型,我们可以利用稳态误差的公式来计算系统的稳态误差。
对于类型0系统,其稳态误差可以通过以下公式来计算:\[ e_{ss} = \lim_{s \to 0} sR(s) \frac{1}{1+G(s)H(s)} \]其中,\( R(s) \) 为系统的输入信号,\( G(s) \) 为系统的开环传递函数,\( H(s) \) 为系统的反馈传递函数。
而对于类型1系统和类型2系统,其稳态误差的计算公式分别为:\[ e_{ss} = \lim_{s \to 0} (1+\frac{1}{G(s)H(s)})R(s)\frac{1}{1+G(s)H(s)} \]\[ e_{ss} = \lim_{s \to 0} \frac{1}{G(s)H(s)}R(s) \frac{1}{1+G(s)H(s)} \]3. 实例分析假设我们有一个闭环传递函数为:\[ G(s) = \frac{K}{s(s+1)(s+2)} \]其中,\( K \) 为系统的增益。
根据该传递函数,我们可以确定系统的类型为类型1,因为传递函数的分母阶数为3,分子阶数为1,所以系统类型为3-1=2。
接下来,我们可以利用稳态误差的公式来计算系统的稳态误差。