南航考研自动控制原理1999
- 格式:pdf
- 大小:4.36 MB
- 文档页数:4

820自动控制原理考试大纲920自动控制原理(专业学位)考试大纲《自动控制原理》考试内容包括: 经典控制理论和现代控制理论。
第一章-自动控制的一般概念:控制系统的一般概念、名词术语、发展史;控制系统的分类;控制系统的组成;典型外作用;对控制系统的基本要求。
第二章-控制系统的数学模型:控制系统动态微分方程的列写;用拉普拉斯变换求解线性微分方程的零初态响应与零输入响应;运动模态的概念;传递函数的定义和性质;典型元部件传递函数的求法;控制系统结构图的绘制;梅逊公式在结构图和信号流图中的应用。
第三章-线性系统的时域分析法:系统稳定性的定义与判断法则;劳斯稳定判据;控制系统时域动态性能指标的定义与计算;一阶系统、二阶系统的阶跃响应,典型欠阻尼二阶系统动态性能指标的计算;输入引起的误差的定义,静态误差系数、系统型别、稳态误差的计算;计算典型输入作用下,不同类型系统的稳态误差;扰动引起的误差的定义与计算方法;减小稳态误差的措施。
第四章-线性系统的根轨法:根轨迹的基本概念;根轨迹的模值条件与相角条件;根轨迹绘制的基本法则;广义根轨迹;主导极点与偶极子的概念及其应用。
第五章-线性系统的频域分析法:频率特性的概念及其图示法;频率特性的计算;开环频率特性的绘制;开环系统幅相曲线绘制;开环对数曲线绘制;由最小相角系统的对数幅频渐近曲线求传递函数;奈奎斯特稳定判据;对数稳定判据;稳定裕度;串联超前校正网络的设计;串联迟后校正网络的设计。
第六章-线性离散系统的分析:离散系统的基本概念;信号的采样与保持;差分方程的概念;差分方程的求取与求解;香农采样定理;Z变换定理;离散系统的数学模型;脉冲传递函数的概念与求法;离散系统输出Z变换的求法;离散系统的稳定性与稳态误差;第七章-非线性控制系统分析知识点:非线性控制系统概述;常见非线性特性及其对系统运动的影响;负倒描述函数曲线的绘制;用描述函数法判断非线性系统稳定性;自激振荡的判断、自振参数的确定。
§自动控制原理参考书目:《自动控制原理(第五版)》胡寿松著,科学出版社2007年§自动控制原理考试大纲:《自动控制原理》考试内容包括: 经典控制理论和现代控制理论两大部分。
第一章自动控制的一般概念知识点:控制系统的一般概念:名词术语、发展史、控制系统的分类、控制系统的组成、典型外作用、对控制系统的基本要求基本要求:掌握反馈控制的基本原理、根据系统工作原理图绘制原理方块图第二章控制的数学模型知识点:控制系统动态微分方程的列写用拉普拉斯变换求解线性微分方程的零初态响应与零输入响应运动模态的概念传递函数的定义和性质、典型元部件传递函数的求法控制系统结构图的绘制、等效变换、梅逊公式在结构图和信号流图中的应用基本要求:1.利用复阻抗建立电路结构图2.熟悉控制系统常用元部件的传递函数3.掌握控制系统结构图的绘制方法及基本等效变换4.用等效变换或梅逊公式求结构图或信号流图的各种传递函数第三章线性系统的时域分析法知识点:控制系统时域动态性能指标的定义与计算、误差的定义与稳态误差的计算系统稳定性的定义与判断法则、系统动态性能分析不作要求的内容: 过阻尼二阶系统性能指标的估算公式非零初始条件下二阶系统的响应过程高阶系统的动态性能估算、赫尔维茨稳定判据动态误差系数、采用串级控制抑制内回路扰动基本要求:1.学会求出一阶系统的阶跃响应、会推导一阶系统动态性能指标的计算公式2.典型欠阻尼二阶系统动态性能指标的计算、性能指标与特征根的关系3.改善二阶系统动态性能指标的方法4.主导极点与偶极子的概念及其应用5.劳斯判据的应用6.静态误差系数、系统型别、稳态误差的计算。
7.扰动引起的误差的定义与计算方法8.减小和消除稳态误差的方法第四章线性系统的根轨法知识点:根轨迹的基本概念、根轨迹的模值条件与相角条件、根轨迹绘制的基本法则广义根轨迹、系统性能的分析不作要求的内容: 根轨迹簇基本要求:1.学会由系统的特征方程求开环增益从零到无穷变化时的根轨迹方程(或开环零点、或开环极点从零到无穷变化)2.理解根轨迹的模值方程与相角方程的几何意义3.掌握零度根轨迹与1800度根轨迹的绘制法则4.学会由根轨迹分析系统稳定性、分析参数的选择对系统运动模态的影响第五章线性系统的频域分析法知识点:频率特性的概念及其图示法、开环频率特性的绘制奈奎斯特稳定判据、稳定裕度不作要求的内容: 对数幅相曲线随机信号的频谱、确定闭环频率特性的图解方法基本要求:1.切记稳定系统的正弦响应的稳态输出是与输入同频率的正弦信号,幅值相角均随频率改变;其稳态误差也是与输入同频率的正弦信号,且幅值相角均改变。
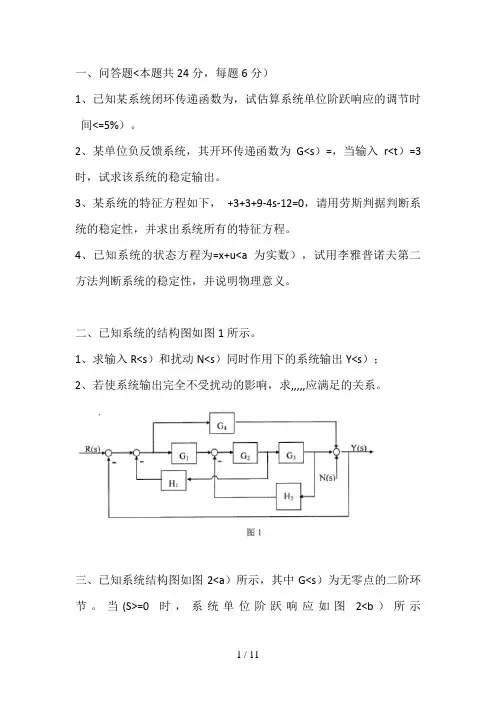
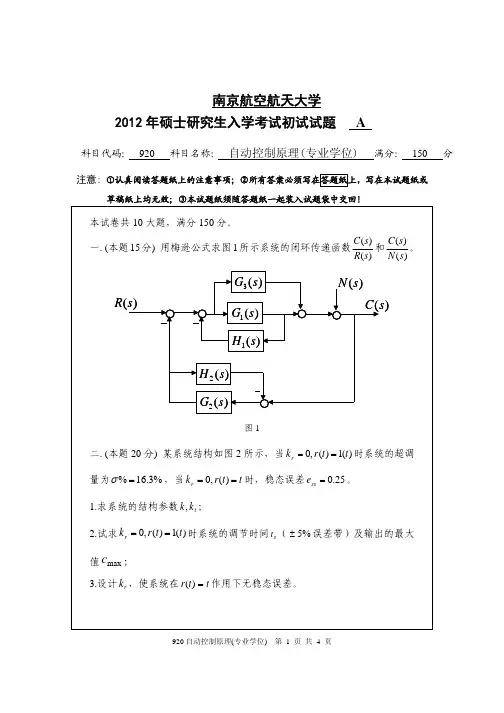
一、问答题<本题共24分,每题6分)1、已知某系统闭环传递函数为,试估算系统单位阶跃响应的调节时间<=5%)。
2、某单位负反馈系统,其开环传递函数为G<s)=,当输入r<t)=3时,试求该系统的稳定输出。
3、某系统的特征方程如下,+3+3+9-4s-12=0,请用劳斯判据判断系统的稳定性,并求出系统所有的特征方程。
4、已知系统的状态方程为=x+u<a为实数),试用李雅普诺夫第二方法判断系统的稳定性,并说明物理意义。
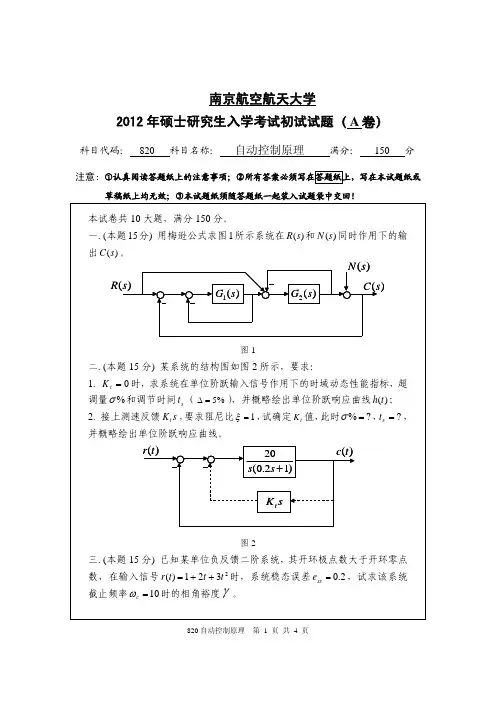
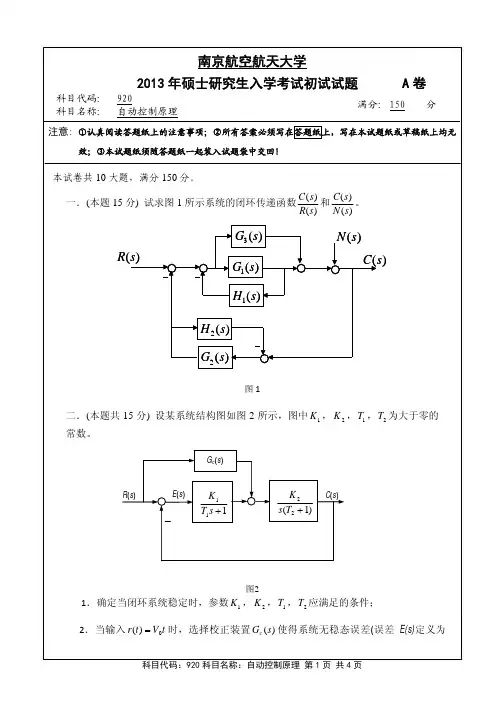
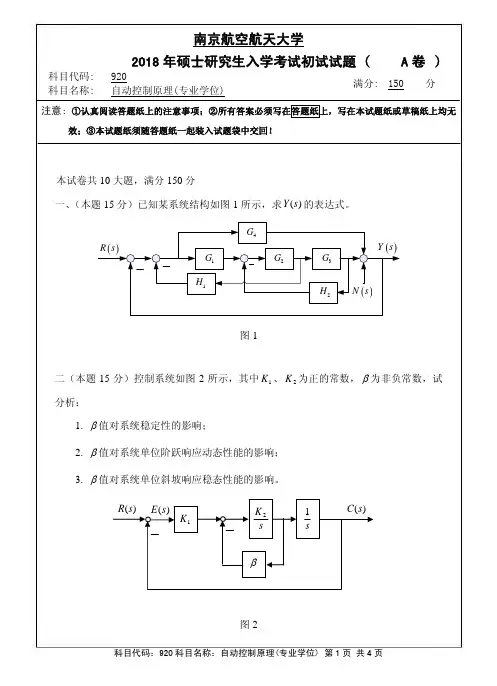
二、已知系统的结构图如图1所示。
1、求输入R<s)和扰动N<s)同时作用下的系统输出Y<s);2、若使系统输出完全不受扰动的影响,求,,,,,应满足的关系。
三、已知系统结构图如图2<a)所示,其中G<s)为无零点的二阶环节。
当(S>=0时,系统单位阶跃响应如图2<b)所示1.求G<s)的表达式。
2.若(S>=,在输入r(t>=时,稳态误差为零,试确定a、b。
<15分)四、某正反馈系统的结构图如图3所示,试求:1.绘制参数a从0 →∞变化的根轨迹。
2.当系统稳定情况下,求阻尼比最小时的闭环传递函数。
<15分)五、已知某最小相位系统的结构图如图4<a)所示。
其中,>0,前向通路G<s)的对数幅频特性曲线如图4<b)所示。
1.求G<s)的表达式。
2.用奈氏稳定判据分析使闭环系统稳定的的取值范围。
3.若=0.2时,求系统相角裕度。
六、系统结构图如图5所示,已知K=10,T=0.1时,截止频率=5. 若要求不变,如何改变K和T才能使系统相角裕度提高?<13分)七、某离散系统的结构图如图6所示,1.判断该系统的闭环稳定性;2.若r(t>=1(t>, 求c(2>、c(> 的数值。
<15分)提示:z[ ]=八、某非线性系统如图7所示,已知非线性环节描述函数为N(A>= ,1. 分析参数K对系统自由运动的影响;2. 若能产生自激振荡,试求使系统输出c<t)处振幅为1时的自激振荡频率和参数K的值。
2017版南京航空航天大学《820自动控制原理》全套考研资料我们是布丁考研网南航考研团队,是在读学长。
我们亲身经历过南航考研,录取后把自己当年考研时用过的资料重新整理,从本校的研招办拿到了最新的真题,同时新添加很多高参考价值的内部复习资料,保证资料的真实性,希望能帮助大家成功考入南航。
此外,我们还提供学长一对一个性化辅导服务,适合二战、在职、基础或本科不好的同学,可在短时间内快速把握重点和考点。
有任何考南航相关的疑问,也可以咨询我们,学长会提供免费的解答。
更多信息,请关注布丁考研网。
以下为本科目的资料清单(有实物图及预览,货真价实):南京航空航天大学《820自动控制原理》全套考研资一、南京航空航天大学《820自动控制原理》历年考研真题及答案解析2016年南京航空航天大学《820自动控制原理》考研真题(11月份统一更新)2015年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2014年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2013年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2012年南京航空航天大学《820自动控制原理》考研真题2011年南京航空航天大学《820自动控制原理》考研真题2010年南京航空航天大学《820自动控制原理》考研真题2009年南京航空航天大学《820自动控制原理》考研真题2008年南京航空航天大学《820自动控制原理》考研真题2007年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2006年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2005年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2004年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2003年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2002年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2001年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2000年南京航空航天大学《820自动控制原理》考研真题(含答案解析)1999年南京航空航天大学《820自动控制原理》考研真题(含答案解析)二、南京航空航天大学《820自动控制原理》考研复习笔记内部笔记1、自动控制原理本科笔记最新本科(手写)课堂笔记2、自动控制原理优秀研究生笔记3、自动控制原理课后习题答案4、《自动控制原理》考试内容三、赠送南京航空航天大学《820自动控制原理》授课PPT(电子版,邮箱发送)以下为截图及预览:2015年考研真题2014年考研真题考研笔记。