南航胡寿松自动控制原理课后题烟台大学文经学院
- 格式:ppt
- 大小:613.00 KB
- 文档页数:17
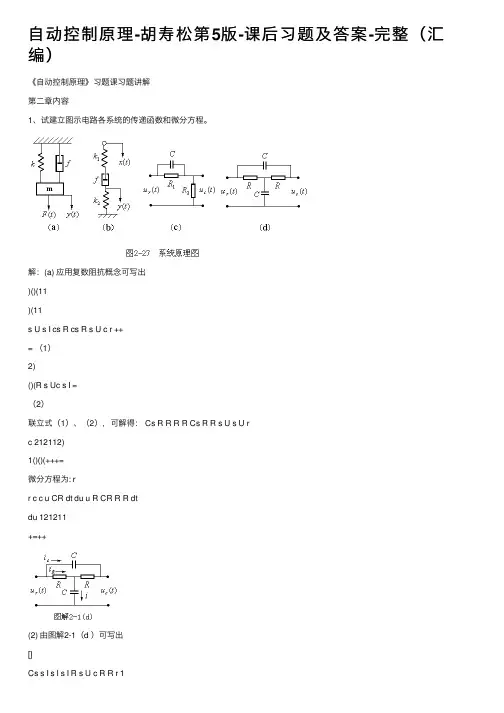
⾃动控制原理-胡寿松第5版-课后习题及答案-完整(汇编)《⾃动控制原理》习题课习题讲解第⼆章内容1、试建⽴图⽰电路各系统的传递函数和微分⽅程。
解:(a) 应⽤复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (1)2)()(R s Uc s I =(2)联⽴式(1)、(2),可解得: Cs R R R R Cs R R s U s U rc 212112)1()()(+++=微分⽅程为: rr c c u CR dt du u R CR R R dtdu 121211+=++(2) 由图解2-1(d )可写出[]Cs s I s I s I R s U c R R r 1)()()()(++= (5))()(1)(s RI s RI Cs s I c R c -= (6)[]Cs s I s I R s I s U c R c c 1)()()()(++= (7)联⽴式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c微分⽅程为 r r r c c c u R C dt du CR dt du u R C dt du CR dt du 222222221213++=++2、试建⽴图⽰电路各系统的传递函数解:由图可写出s C R s U c 221)(+ = s C R s C R s C R s U r 111112111)(+?++ 整理得)()(s U s U r c = 1)(1)(21221122121221122121+++++++s C R C R C R s C C R R s C R C R s C C R R 3、试⽤结构图等效化简求图2-32所⽰各系统的传递函数)()(s R s C 。
解(a )所以: 432132432143211)()(G G G G G G G G G G G G G G s R s C ++++=(b )所以: H G G G s R s C 2211)()(--=(c )所以:32132213211)()(G G G G G G G G G G s R s C +++= (d )所以:2441321232121413211)()(H G G G G G G H G G H G G G G G G G s R s C ++++++= (e )所以: 2321212132141)()(H G G H G H G G G G G G s R s C ++++=4、电⼦⼼脏起博器⼼律控制系统结构图如题3-49图所⽰,其中模仿⼼脏的传递函数相当于⼀纯积分环节。
1 请解释下列名字术语:自动控制系统、受控对象、扰动、给定值、参考输入、反馈。
解:自动控制系统:能够实现自动控制任务得系统,由控制装置与被控对象组成; 受控对象:要求实现自动控制得机器、设备或生产过程扰动:扰动就是一种对系统得输出产生不利影响得信号、如果扰动产生在系统内部称为内扰;扰动产生在系统外部,则称为外扰。
外扰就是系统得输入量。
给定值:受控对象得物理量在控制系统中应保持得期望值参考输入即为给定值、反馈:将系统得输出量馈送到参考输入端,并与参考输入进行比较得过程。
2请说明自动控制系统得基本组成部分。
解:作为一个完整得控制系统,应该由如下几个部分组成:①被控对象: 所谓被控对象就就是整个控制系统得控制对象;②执行部件: 根据所接收到得相关信号,使得被控对象产生相应得动作;常用得执行元件有阀、电动机、液压马达等。
③给定元件: 给定元件得职能就就是给出与期望得被控量相对应得系统输入量(即参考量);④比较元件: 把测量元件检测到得被控量得实际值与给定元件给出得参考值进行比较,求出它们之间得偏差、常用得比较元件有差动放大器、机械差动装置与电桥等。
⑤测量反馈元件:该元部件得职能就就是测量被控制得物理量,如果这个物理量就是非电量,一般需要将其转换成为电量。
常用得测量元部件有测速发电机、热电偶、各种传感器等;⑥放大元件: 将比较元件给出得偏差进行放大,用来推动执行元件去控制被控对象。
如电压偏差信号,可用电子管、晶体管、集成电路、晶闸管等组成得电压放大器与功率放大级加以放大。
⑦校正元件: 亦称补偿元件,它就是结构或参数便于调整得元件,用串联或反馈得方式连接在系统中,用以改善系统得性能、常用得校正元件有电阻、电容组成得无源或有源网络,它们与原系统串联或与原系统构成一个内反馈系统。
3请说出什么就是反馈控制系统,开环控制系统与闭环控制系统各有什么优缺点?解:反馈控制系统即闭环控制系统,在一个控制系统,将系统得输出量通过某测量机构对其进行实时测量,并将该测量值与输入量进行比较,形成一个反馈通道,从而形成一个封闭得控制系统;开环系统优点:结构简单,缺点:控制得精度较差;闭环控制系统优点:控制精度高,缺点:结构复杂、设计分析麻烦,制造成本高、4 请说明自动控制系统得基本性能要求。

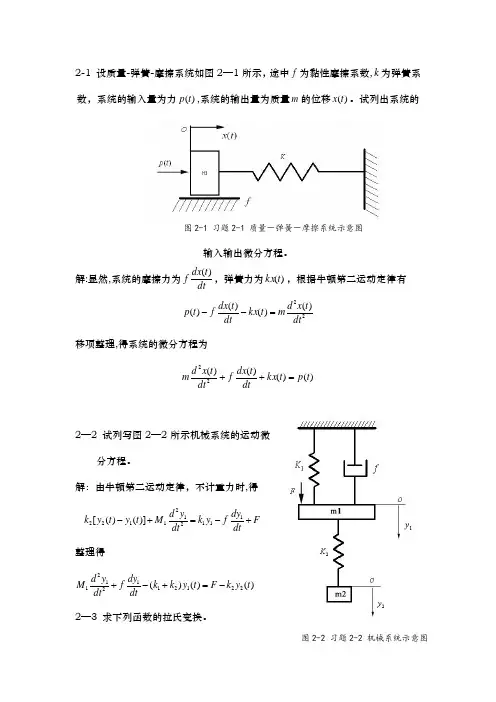
2-1 设质量-弹簧-摩擦系统如图2—1所示,途中f 为黏性摩擦系数,k 为弹簧系数,系统的输入量为力()p t ,系统的输出量为质量m 的位移()x t 。
试列出系统的输入输出微分方程。
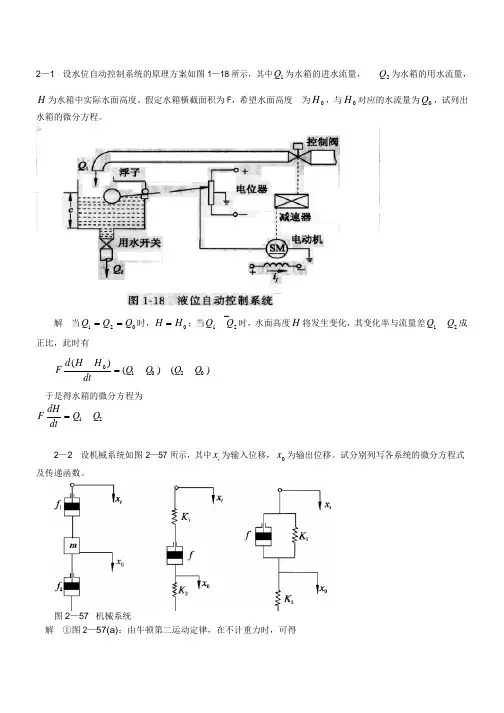
解:显然,系统的摩擦力为dtt dx f)(,弹簧力为)(t kx ,根据牛顿第二运动定律有 22)()()()(dtt x d m t kx dt t dx f t p =-- 移项整理,得系统的微分方程为)()()()(22t p t kx dtt dx f dt t x d m =++2—2 试列写图2—2所示机械系统的运动微分方程。
解:由牛顿第二运动定律,不计重力时,得2112211112[()()]d y dyk y t y t M k y f F dt dt-+=-+整理得2111121222()()()d y dyM f k k y t F k y t dt dt+-+=-2—3 求下列函数的拉氏变换。
图2-1 习题2-1 质量-弹簧-摩擦系统示意图图2-2 习题2-2 机械系统示意图(1))sin 1(3)(t t f -= (2)at te t f =)( (3))43cos()(π-=t t f解:(1)[()][3(1sin )]L f t L t =-2223([1][sin ])113()13(1)(1)L L t s s s s s s =-=-+-+=+ (2)at te t f =)(21[]L t s=21[()][]()at L f t L te s a ==-(3)()cos(3))cos(3)]42f t t t t π=-=+[()])cos(3)]2L f t t t =+222[sin(3)][cos(3)])3)29939L t L t s s s s s =+=++++=+2—4 求下列函数的拉氏反变换 (1))5)(2(1)(++-=s s s s F(2))3(6)(2+-=s s s s F(3))1(152)(22++-=s s s s s F解:(1)112()(2)(5)25s F s s s s s --==+++++1112[()][]25L F s L s s ---=+++ 112512[]2[]252ttL L s s e e ----=-+++=-+ (2)226211()(3)3s F s s s s s s --==++++ 112211[()][]3L F s L s s s ---=+++ 111231112[][][]321t L L L s s s t e ----=+-+=+- (3)22225115()(1)1s s s F s s s s s -+-==+++ 11215[()][]1s L F s L s s ---=++11215[][]11cos 5sin s L L s s t t ---=++=+-2—5 试分别列写图2—3中各无源网络的微分方程(设电容C 上的电压为)(t u c ,电容1C 上的电压为)(1t u c ,以此类推)。

自动控制原理课后答案1 请解释下列名字术语:自动控制系统、受控对象、扰动、给定值、参考输入、反馈。
解:自动控制系统:能够实现自动控制任务的系统,由控制装置与被控对象组成;受控对象:要求实现自动控制的机器、设备或生产过程扰动:扰动是一种对系统的输出产生不利影响的信号。
如果扰动产生在系统内部称为内扰;扰动产生在系统外部,则称为外扰。
外扰是系统的输入量。
给定值:受控对象的物理量在控制系统中应保持的期望值参考输入即为给定值。
反馈:将系统的输出量馈送到参考输入端,并与参考输入进行比较的过程。
2 请说明自动控制系统的基本组成部分。
解:作为一个完整的控制系统,应该由如下几个部分组成:①被控对象:所谓被控对象就是整个控制系统的控制对象;②执行部件:根据所接收到的相关信号,使得被控对象产生相应的动作;常用的执行元件有阀、电动机、液压马达等。
③给定元件:给定元件的职能就是给出与期望的被控量相对应的系统输入量(即参考量);④比较元件:把测量元件检测到的被控量的实际值与给定元件给出的参考值进行比较,求出它们之间的偏差。
常用的比较元件有差动放大器、机械差动装置和电桥等。
⑤测量反馈元件:该元部件的职能就是测量被控制的物理量,如果这个物理量是非电量,一般需要将其转换成为电量。
常用的测量元部件有测速发电机、热电偶、各种传感器等;⑥放大元件:将比较元件给出的偏差进行放大,用来推动执行元件去控制被控对象。
如电压偏差信号,可用电子管、晶体管、集成电路、晶闸管等组成的电压放大器和功率放大级加以放大。
⑦校正元件:亦称补偿元件,它是结构或参数便于调整的元件,用串联或反馈的方式连接在系统中,用以改善系统的性能。
常用的校正元件有电阻、电容组成的无源或有源网络,它们与原系统串联或与原系统构成一个内反馈系统。
3 请说出什么是反馈控制系统,开环控制系统和闭环控制系统各有什么优缺点?解:反馈控制系统即闭环控制系统,在一个控制系统,将系统的输出量通过某测量机构对其进行实时测量,并将该测量值与输入量进行比较,形成一个反馈通道,从而形成一个封闭的控制系统;开环系统优点:结构简单,缺点:控制的精度较差;闭环控制系统优点:控制精度高,缺点:结构复杂、设计分析麻烦,制造成本高。
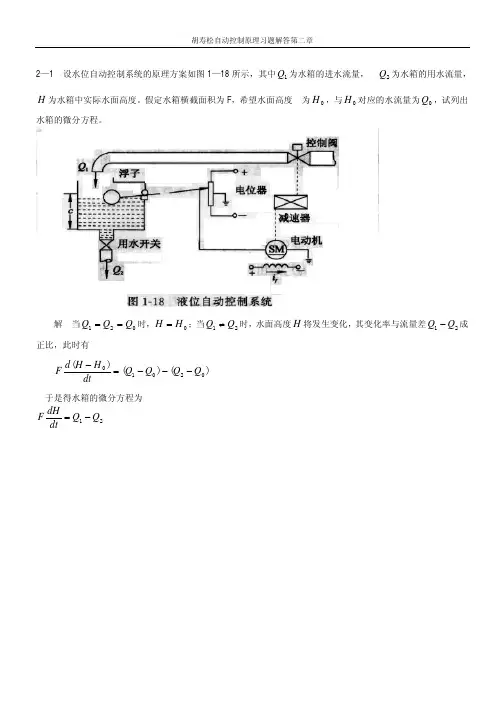
第二部分课后习题第1章自动控制的一般概念1-1图1-1是液体自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-1液体自动控制系统原理图解:当12Q Q 时,液面高度的变化。
例如,c 增加时,浮子升高,使电位器电刷下移,产生控制电压,驱动电动机减小阀门开度,使进入水箱的流量减少。
反之,当c 减小时,则系统会自动增大阀门开度,加大流入水量,使液位升到给定高度c 。
方块图如图1-2所示。
图1-2液体自动控制系统方块图1-2图1-3是仓库大门自动控制系统原理图。
试说明系统自动控制大门开闭的工作原理并画出系统方块图。
图1-3仓库大门自动控制系统原理图解:当合上开门开关时,产生偏差电压信号,信号被放大后,驱动伺服电动机转动,使大门向上提起。
同时,电位器电刷上移,测量电路重新达到平衡,电动机停止转动。
反之,当合上关门开关时,伺服电动机反向转动,带动绞盘转动使大门关闭。
方块图如图1-4所示。
图1-4仓库大门自动控制系统方块图1-3图1-5(a)和(b)均为自动调压系统。
设空载时,图(a)和图(b)的发电机端电压均为110V。
试问带上负载后,图(a)和图(b)中哪个系统能保持110V电压不变?哪个系统的电压会稍低于110V?为什么?图1-5自动调压系统解:图1-5(a)所示系统能够恢复到110V,图1-5(b)所示系统的端电压将稍低于110V,原因如下:图1-5(a)所示系统,当端电压低于给定电压时,其偏差电压经放大器放大使伺服电机SM转动,从而偏差电压减小至零,伺服电机停止转动,因此,图1-5(a)所示系统能够恢复到110V。
图1-5(b)所示系统,当偏差电压为零时,激磁电流也为零,发电机不能工作,因此,图1-5(b)所示系统的端电压将稍低于110V。
1-4图1-6为水温控制系统原理示意图。
冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。
冷水流量变化用流量计测量。
1-3解:系统的工作原理为:当流出增加时,液位降低,浮球降落,控制器通过移动气动阀门的开度,流入量增加,液位开始上。
当流入量和流出量相等时达到平衡。
当流出量减小时,系统的变化过程则相反。
流出量希望液位图一1-4(1)非线性系统(2)非线性时变系统(3)线性定常系统(4)线性定常系统(5)线性时变系统(6)线性定常系统2 2-1 解:显然,弹簧力为 kx (t ) ,根据牛顿第二运动定律有:F (t ) − kx (t ) = m移项整理,得机械系统的微分方程为:d 2x (t ) dt 2m d x (t ) + kx (t )= F (t ) dt2对上述方程中各项求拉氏变换得:ms 2 X (s ) + kX (s ) =F (s )所以,机械系统的传递函数为:G (s ) = X (s ) =F (s )1ms 2+k2-2 解一:由图易得:i 1 (t )R 1 = u 1 (t ) − u 2 (t ) u c (t ) + i 1 (t )R 2 = u 2 (t ) du c (t )i 1 (t )= Cdt 由上述方程组可得无源网络的运动方程为:C ( R + R ) du 2 (t ) u (t ) = CRdu 1 (t ) u (t )1 2 dt+ 22 + 1 dt 对上述方程中各项求拉氏变换得:C (R 1 + R 2 )sU 2 (s ) + U 2 (s ) = CR 2 sU 1 (s ) + U 1 (s )所以,无源网络的传递函数为:G (s ) = U 2 (s ) =U 1 (s )1 + sCR 21 + sC (R 1 +R 2 ) 解二(运算阻抗法或复阻抗法):U (s ) 1 + R 2 1 + R Cs2 = Cs =2U (s ) R + 1 + R 1 + ( R + R )Cs 1 1 21Cs22-5 解:按照上述方程的顺序,从输出量开始绘制系统的结构图,其绘制结果如下图所示:依次消掉上述方程中的中间变量 X 1 , X 2 , X 3 , 可得系统传递函数为:C (s ) = R (s )G 1 (s )G 2 (s )G 3 (s )G 4(s )1 + G2 (s )G3 (s )G 6 (s ) + G 3 (s )G4 (s )G5 (s ) + G 1 (s )G 2 (s )G 3 (s )G 4(s )[G 7 (s ) − G 8 (s )]2-6 解:①将G1 (s) 与G1 (s) 组成的并联环节和G1 (s) 与G1 (s) 组成的并联环节简化,它们的等效传递函数和简化结构图为:G 12 (s) = G1(s) + G2(s)G 34 (s) = G3(s) −G4(s)②将G12 (s), G34 (s) 组成的反馈回路简化便求得系统的闭环传递函数为:2-7 解:C(s)=R(s)G12(s)1 + G12(s)G34(s)=G1(s) + G2(s)1 +[G1(s) + G2(s)][G3(s) −G4(s)]由上图可列方程组:[E(s)G1 (s) −C(s)H2(s)]G2(s) = C(s)R(s) −H1(s)C(s)G2(s)= E(s)联列上述两个方程,消掉E (s) ,得传递函数为:C(s)= R(s)G1(s)G2(s)1 + H1(s)G1(s) + H2(s)G2(s)联列上述两个方程,消掉C (s) ,得传递函数为:E(s)= R(s)1 + H2(s)G2(s)1 + H1(s)G1(s) + H2(s)G2(s)1 22 23 2-8 解:将①反馈回路简化,其等效传递函数和简化图为: 0.4G (s ) =2s + 1 =1 +0.4 * 0.5 2s + 15+ 3将②反馈回路简化,其等效传递函数和简化图为:1 G (s ) = s + 0.3s + 1 = 5s + 3 21 + 0.4 5s + 4.5s + 5.9s + 3.4(s + 0.3s + 1)(5s + 3)将③反馈回路简化便求得系统的闭环传递函数为:0.7 * (5s +3)Θo (s)= 5s 3 + 4.5s 2 + 5.9s + 3.4=3.5s + 2.1Θi (s) 1 +0.7 * Ks(5s +3)5s3+ (4.5 +3.5K )s 2+ (5.9 + 2.1K )s +3.42 5s3-3 解:该二阶系统的最大超调量:σp =e−ζπ/1−ζ2*100%当σp= 5% 时,可解上述方程得:ζ=0.69当σp= 5% 时,该二阶系统的过渡时间为:ts≈3ζwn所以,该二阶系统的无阻尼自振角频率w n 3-4 解:≈3ζts=30.69*2= 2.17由上图可得系统的传递函数:10 * (1 + Ks)C (s)= R(s)s(s + 2)1 +10 * (1 +Ks)s(s + 2)==10 * (Ks +1)s + 2 * (1 +5K )s +10所以w n =10 ,ζwn=1 +5K⑴若ζ= 0.5 时,K ≈0.116所以K ≈0.116时,ζ= 0.5⑵系统单位阶跃响应的超调量和过渡过程时间分别为:σ p = e−ζπ / 1−ζ2*100% = e−0.5*3.14 /1−0.52*100% ≈ 16.3%t s =3 ζw n= 3 0.5 *≈ 1.910⑶ 加入 (1 + Ks ) 相当于加入了一个比例微分环节,将使系统的阻尼比增大,可以有效地减小原系统的阶跃响应的超调量;同时由于微分的作用,使系统阶跃响应的速度(即变w 212p化率)提高了,从而缩短了过渡时间:总之,加入 (1 + Ks ) 后,系统响应性能得到改善。
自动控制原理课后答案1 请解释下列名字术语:自动控制系统、受控对象、扰动、给定值、参考输入、反馈。
解:自动控制系统:能够实现自动控制任务的系统,由控制装置与被控对象组成;受控对象:要求实现自动控制的机器、设备或生产过程扰动:扰动是一种对系统的输出产生不利影响的信号。
如果扰动产生在系统内部称为内扰;扰动产生在系统外部,则称为外扰。
外扰是系统的输入量。
给定值:受控对象的物理量在控制系统中应保持的期望值参考输入即为给定值。
反馈:将系统的输出量馈送到参考输入端,并与参考输入进行比较的过程。
2 请说明自动控制系统的基本组成部分。
解:作为一个完整的控制系统,应该由如下几个部分组成:①被控对象:所谓被控对象就是整个控制系统的控制对象;②执行部件:根据所接收到的相关信号,使得被控对象产生相应的动作;常用的执行元件有阀、电动机、液压马达等。
③给定元件:给定元件的职能就是给出与期望的被控量相对应的系统输入量(即参考量);④比较元件:把测量元件检测到的被控量的实际值与给定元件给出的参考值进行比较,求出它们之间的偏差。
常用的比较元件有差动放大器、机械差动装置和电桥等。
⑤测量反馈元件:该元部件的职能就是测量被控制的物理量,如果这个物理量是非电量,一般需要将其转换成为电量。
常用的测量元部件有测速发电机、热电偶、各种传感器等;⑥放大元件:将比较元件给出的偏差进行放大,用来推动执行元件去控制被控对象。
如电压偏差信号,可用电子管、晶体管、集成电路、晶闸管等组成的电压放大器和功率放大级加以放大。
⑦校正元件:亦称补偿元件,它是结构或参数便于调整的元件,用串联或反馈的方式连接在系统中,用以改善系统的性能。
常用的校正元件有电阻、电容组成的无源或有源网络,它们与原系统串联或与原系统构成一个内反馈系统。
3 请说出什么是反馈控制系统,开环控制系统和闭环控制系统各有什么优缺点?解:反馈控制系统即闭环控制系统,在一个控制系统,将系统的输出量通过某测量机构对其进行实时测量,并将该测量值与输入量进行比较,形成一个反馈通道,从而形成一个封闭的控制系统;开环系统优点:结构简单,缺点:控制的精度较差;闭环控制系统优点:控制精度高,缺点:结构复杂、设计分析麻烦,制造成本高。