第五章 线性系统的频域分析法-5-3——【南航 自动控制原理】
- 格式:pptx
- 大小:1.62 MB
- 文档页数:4
第5章 控制系统的频域分析时域分析法具有直观、准确的优点,主要用于分析线性系统的过渡过程。
如果描述系统的微分方程是一阶或二阶的,求解后可利用时域指标直接评估系统的性能。
然而实际系统往往都是高阶的,要建立和求解高阶系统的微分方程比较困难。
而且,按照给定的时域指标设计高阶系统也不容易实现。
本章介绍的频域分析法,可以弥补时域分析法的不足。
频域法是通过分析不同谐波的输入时系统的稳态响应,故又称为频率响应法。
利用此方法,将传递函数从复域引到具有明确物理概念的频域来分析系统的特性。
频率分析的优点较多。
首先,只要求出系统的开环频率特性,就可以判断闭环系统是否稳定。
其次,由系统的频率特性所确定的频域指标与系统的时域指标之间存在着一定的对应关系,而系统的频率特性又很容易和它的结构、参数联系起来。
因而可以根据频率特性曲线的形状去确定系统的结构和参数,使之满足时域指标的要求,并且可以同时确定系统工作的频率范围。
此外,频率特性不但可由微分方程或传递函数求得,而且还可以用实验方法求得。
这对于某些难以用机理分析方法建立微分方程或传递函数的元件(或系统)来说,采用频率特性可以较方便地解决此类问题。
因此,频率法得到了广泛的应用,它也是经典控制理论中的重点内容。
控制系统的时域分析法和频域分析法,作为经典控制理论的两个重要组成部分,既相互渗透,又相互补充,在控制理论中占有重要地位。
频率特性具有较强的直观性和明确的物理意义,可用实验的方法测量系统的频率响应,因此,频率特性分析的方法在控制工程中广泛应用。
频率特性的定义是以输入信号为谐波信号给出的。
当输入信号为周期信号时,可将其分解为叠加的频谱离散的谐波信号;当输入信号为非周期信号时,可将非周期信号看成周期为无穷大的周期信号,因此,非周期信号分解为叠加的频谱连续的谐波信号。
这样一来,就可用关于系统对不同频率的谐波信号的响应特性研究,取代关于系统对任何信号的响应特性的研究。
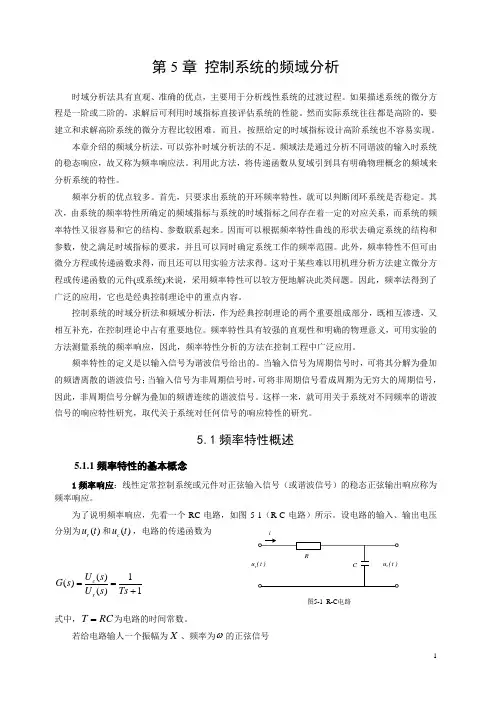
5.1频率特性概述5.1.1频率特性的基本概念1频率响应:线性定常控制系统或元件对正弦输入信号(或谐波信号)的稳态正弦输出响应称为频率响应。
自动控制原理第五章线性系统的频域分析法1、基本内容和要点(l)频率特性系统的稳态频率响应,频率响应的物理概念及数学定义;求取频率特性的分析法和实验法。
(2)典型环节的频率特性比例、惯性、积分、微分、振荡、延迟环节的频率特性和对数频率特性。
非最小相位环节的频率特性。
(3)反馈控制系统的开环频率特性研究系统开环频率特性的意义。
单环系统开环对数频率持性的求取与绘制。
最小相位系统开环对数幅频特性与相频特性间的对应关系。
(4)奈奎斯特稳定判据幅角定理。
S平面与F平面的映射关系。
根据开环频率特性判别闭环系统稳定性的奈氏判据。
奈氏判据在多环系统中的应用和推广。
系统的相对稳定性。
相角与增益稳定裕量。
(5)二阶和高阶系统的频率域性能指标与时域性指标。
系统频率域性能指标。
二阶和高阶系统暂态响应性能指标与频率域性能指标间的解析关系及近似关系。
(6)系统的闭环频率特性开环频率特性与闭环频率特性间的解析关系。
用等M圆线从开环频率特性求取闭环频率特性。
用尼氏图线从开环对数频率特性求取闭环频率特性。
2、重点(l)系统稳态频率响应和暂态时域响应的关系。
(2)系统开环频率特性的绘制,最小相位系统开环频率特性的特点。
(3)奈奎斯特稳定判据和稳定裕量。
5-1引言第三章,时域分析,分析系统零、极点与系统时域指标的关系;典型二阶系统极点或和n与时域指标tp、和t、tr及稳态误差等的关系,及高阶系统的近似指标计算;第四章,根轨迹分析,研究系统某一个参数变化对系统闭环极点的影响;本章讨论系统零、极点对系统频率域指标的关系,频域指标又分开环频域指标和闭环频域指标,它们都是在频域上评价系统性能的参数。
频域分析是控制理论的一个重要分析方法。
5-2频率特性1.频率特性的基本概念理论依据定理:设线性定常系统G()的输入信号是正弦信号某(t)某int,在过度过程结束后,系统的稳态输出是与输入同频率的正弦信号,其幅值和相角都是频率的函数,即为c(t)Y()in[t()]。
第五章 频域分析法目的:①直观,对高频干扰的抑制能力。
对快(高频)、慢(低频)信号的跟踪能力。
②便于系统的分析与设计。
③易于用实验法定传函。
§5.1 频率特性一. 定义)()()()(1n p s p s s s G +⋅⋅⋅+=θ在系统输入端加一个正弦信号:t R t r m ωsin )(⋅=))(()(22ωωωωωj s j s R s R s R m m -+⋅=+⋅=↔ 系统输出:))(()()()()(1ωωωθj s j s R p s p s s s Y m n-+⋅⋅+⋅⋅⋅+=t j t j e A e A t y t y ωω⋅+⋅+=↔-瞬态响应)()(1若系统稳定,即)(s G 的极点全位于s 左半平面,则 0)(l i m 1=∞→t y t稳态响应为:tj tj ss eA eA t y ωω⋅+⋅=-)(而)(21)()(22ωωωωωj G R jj s s R s G A m j s m -⋅-=+⋅+⋅⋅=-=)(21)()(22ωωωωωj G R jj s s R s G A m j s m ⋅=-⋅+⋅⋅== ∴t j m tj m ss e j G R je j G R j t y ωωωω⋅⋅+⋅-⋅-=-)(21)(21)( =])()([21t j t j m e j G e j G R jωωωω-⋅--⋅⋅ 又)(s G 为s 的有理函数,故)()(*ωωj G j G -=,即φωωj e j G j G )()(= φωωj e j G j G -=-)()(∴][)(21)()()(φωφωω+-+--⋅=t j t j mss e e j G R jt y =)sin()(φωω+⋅⋅t j G R m =)sin(φω+⋅t Y m可见:对稳定的线性定常系统,加入一个正弦信号,其稳态响应也是一个同频率的正弦信号。
其幅值是输入正弦信号幅值的)(ωj G 倍,其相移为)(ωφj G ∠=。