4
4-1 根轨迹的基本概念
4-1-1 根轨迹
闭环极点随开环根轨迹增益变化的轨迹
目标
系统参数 连续、运动、动态
开环系统中某个参数由0变化到 时,
闭环极点在s平面内画出的轨迹。一 个根形成一条轨迹。
5
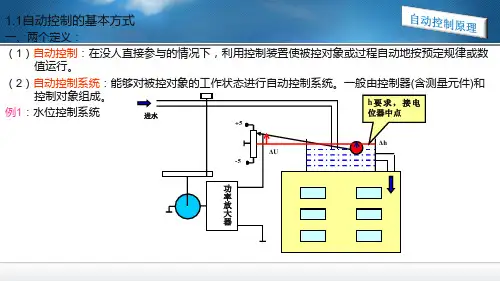
例4-1 已知系统如图,试分析 Kc 对系统特征根分布的影响。
R(s)
_ Kc
1
C(s)
s(s+2)
解:开环传递函数 G(s) Kc 开环极点:p1 0
s(s 2)
开环根轨迹增益:K * Kc 闭环特征方程:s2 2s K * 0
闭环特征根
2 s1,2
4 4K* 1
2
1 K*
p2 2
6
研究K*从0~∞变化时,闭环特征根的变化
K*与闭环特征根的关系 s1,2 1 1 K*
引言
时域分析法
优点:可以直接分析系统的性能 缺点:不能在参数变化时,预测系统性能;
不能在较大范围内,给出参数优化设 计的预测结果
系统的闭环极点
系统的稳定性 系统的动态性能
系统闭环特征方程的根
高阶方程情形 下求解很困难
系统参数(如开环放大倍数)的变化会引起其 变化,针对每个不同参数值都求解一遍根很麻 烦。
1 绘制依据 ——根轨迹方程
R(s) _
C(s) G(s)
闭环的特征方程:1 G(s)H(s) 0
H(s)
即:G(s)H(s) 1 ——根轨迹方程(向量方程)
用幅值、幅角的形式表示:
G(s)H(s) 1
G(s)H(s) [G(s)H(s)] 1(2k 1) G(s)H(s) (2k 1)