- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
等于系统的阶数 阶数。 状态变量的个数 k等于系统的阶数。 对于较简单的电路,用直观的方法容易列写状态方程。 对于较简单的电路,用直观的方法容易列写状态方程。 当电路结构相对复杂时, 当电路结构相对复杂时,往往要借助计算机辅助设计 (CAD)技术。 )技术。
三.由系统的输入-输出方程或流图建立状态方程
输出方程
, , r (t) = h [λ (t), λ2(t),L λk (t);e1(t), e2 (t),L em(t),t] 1 1 1 r (t) = h [λ (t), λ (t),L λ (t);e (t), e (t),L e (t),t] , k , m 2 2 1 2 1 2 L rr (t) = hr [λ (t), λ2(t),L λk (t);e1(t), e2(t),L em(t),t] , , 1
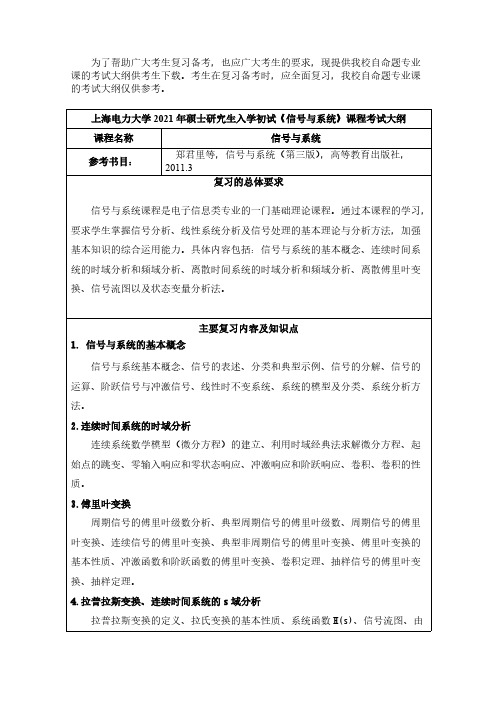
当用积分器来实现该系统时, 当用积分器来实现该系统时,其流图如下
b0
b 1 e(t)
1
1 s λk 1 sλk−1 − a1 −a2
b2
bk−2
bk−1
λ3 1 s λ 2 1 s λ1 bk
− ak−2 −Байду номын сангаасak−1 − ak
r(t )
取积分器的输出作为状态变量, 取积分器的输出作为状态变量,如图中所标的
二.由电路图直接建立状态方程
(1)选取独立的电容上电压和电感中电流为状态变量, 选取独立的电容上电压和电感中电流为状态变量, 选取独立的电容上电压和电感中电流为状态变量 有时也选电容电荷与电感磁链。 有时也选电容电荷与电感磁链。 (2)对包含有电容的回路列写回路电压方程,其中必然 对包含有电容的回路列写回路电压方程, 对包含有电容的回路列写回路电压方程 ,对连接有电容的结点列结点电流方程, 包括 LdiL(t ) 对连接有电容的结点列结点电流方程,其 dt dvC (t ) 注意只能将此项放在方程左边。 中必然包含 C ,注意只能将此项放在方程左边。 dt (3)把方程中非状态变量用状态变量表示。 把方程中非状态变量用状态变量表示。 把方程中非状态变量用状态变量表示 (4)把状态方程和输出方程用矩阵形式表示。 把状态方程和输出方程用矩阵形式表示。 把状态方程和输出方程用矩阵形式表示
状态方程和输出方程分析的示意结构图
D(t)
e(t) λ (t) r(t)
B(t)
∑
1 p
C(t)
∑
A(t)
1 d 是积分环节, 是积分环节,它的输入为 , 。 λ (t) 输出为 λ (t) p dt
的函数, 若 A, B,C, D矩阵是 t 的函数,表明系统是线性时变 对于线性时不变系统, 的,对于线性时不变系统,A, B,C, D 的各元素都为常 改变。 数,不随 t 改变。
对应A,B,C,D的矩阵分别为 的矩阵分别为 对应
1 0 L 0 0 0 1 L M M O A= M 0 0 L 0 −ak −ak−1 −ak−2 L 0 0 M 1 −a1 0 0 B = M 0 1
C = [(bk −akb0 ), (bk−1 −ak−1b0 ),L (b2 −a2b0 ), (b −a1b0 )] , 1 D = b0
状态变量的特性
每一状态变量的导数是所有状态变量和输入激 励信号的函数; 励信号的函数; 每一微分方程中只包含有一个状态变量对时间的导数; 每一微分方程中只包含有一个状态变量对时间的导数; 输出信号是状态变量和输入信号的函数; 输出信号是状态变量和输入信号的函数; 通常选择动态元件的输出作为状态变量, 通常选择动态元件的输出作为状态变量,在连续系统中 是选积分器的输出。 是选积分器的输出。 建立给定系统的状态方程的方法分为直接法和间接法 两类: 两类: 直接法——主要应用于电路分析、电网络(如滤 主要应用于电路分析、 直接法 主要应用于电路分析 电网络( 波器)的计算机辅助设计; 波器)的计算机辅助设计; 间接法——常见于控制系统研究。 常见于控制系统研究。 间接法 常见于控制系统研究
λ1(t), λ2(t),L λk (t), ,
状态方程 & λ1 = λ2 & λ2 = λ3 M & λk−1 = λk & λ = −a λ −a λ −L−a λ −a λ +e(t) k 1 k−1 2 2 k−1 1 k k 输出方程
r(t) = bkλ1 +bk−1λ2 +L+b2λk−1 +b λk 1 +b0[−akλ1 −ak−1λ2 −L−a2λk−1 −a1λk +e(t)] +(b −a1b0 )λk +b0e(t) 1
表示为矢量矩阵形式
d 状态方程 λ(t) = A ×kλ k×1(t) + Bk×mem×1(t) k dt k×1
输入方程
[r(t)]r×1 = Cr×kλ k×1(t) + Dr×mem×1(t)
d 1 dt λ (t) d λ (t) d λ (t) = dt 2 dt M d λk (t) dt
如果系统是线性时不变的, 如果系统是线性时不变的 , 则状态方程和输出方程是 状态变量和输入信号的线性组合, 状态变量和输入信号的线性组合,即:
d 1 1 dt λ (t) = a11λ (t) + a12λ2 (t) +L+ a1kλk (t) +b e1(t) +b e2(t) +L 1mem(t) b 11 12 d λ2 (t) = a21λ (t) + a22λ2 (t) +L+ a2kλk (t) 1 dt b +b21e1(t) +b22e2(t) +L 2mem(t) L d 1 dt λk (t) = ak1λ (t) + ak2λ2(t) +L+ akkλk (t) +bk1e1(t) +bk2e2(t) +L kmem(t) b
r (t) = c11λ (t) +c12λ2 (t) +L+c1kλk (t) + d11e1(t) 1 1 + d12e2 (t) +Ld1mem(t) r2 (t) = c21λ (t) +c22λ2 (t) +L+c2kλk (t) + d21e1(t) 1 + d22e2 (t) +L 2mem(t) d L rr (t) = cr1λ (t) +cr2λ2 (t) +L+crkλk (t) + dr1e1(t) 1 + dr2e2 (t) +Ldrmem(t)
λ (t) 1 λ (t) 2 λ (t) = M λk (t)
a11 a12 La1k b b Lb k c11 c12 Lc1k 11 12 1 a a La b ba Lb c c Lc 2k 2k 2k A= 21 22 B = 21 22 C = 21 22 M M M M M M M M M ak1 ak2 Lakk bk1 bk2 Lbkk cr1 cr2 Lcrk d11 d12 Ld1k d d Ld 2k D = 21 22 M M M dr1 dr2 Ldrk r (t) 1 r (t) r(t) = 2 M rr (t) e1(t) e (t) e(t) = 2 M em(t)
= (bk −akb0 )λ1 +(bk−1 −ak−1b0 )λ2 +L+(b2 −a2b0 )λk−1
表示成矢量矩阵的形式 状态方程
& λ 0 1 0 L 1 & 0 1 L λ2 0 M = M M M O & 0 0 L λk−1 0 −a −a & k− 1 − a −2 L k λk k 0 λ 0 1 0λ2 0 M M + M e(t) 1 λk−1 0 −a1λk 1
四.将系统函数分解 建立状态方程
将系统函数的分母分解因式, 将系统函数的分母分解因式,可以对应构成并联或串联 形式的流图结构,即可列出不同形式的状态方程。 形式的流图结构,即可列出不同形式的状态方程。 (一)用流图的并联结构形式列状态方程
(二)用流图的串联结构形式列状态方程
输出方程
λ 1 λ 2 r(t) = [(bk −akb0 ), (bk−1 −ak−1b0 ),L (b2 −a2b0 ), (b −a1b0 )]M +b0e(t) , 1 λk−1 λk
&(t) = Aλ(t) + Be(t) λ 简化成 r(t) = Cλ(t) + De(t)
为系统的k个状态变量 个状态变量。 λ1(t ), λ2(t ),L, λk (t ) 为系统的 个状态变量。
状态方程
d , , 1 1 dt λ (t) = f1[λ (t), λ2(t),L λk (t);e1(t), e2(t),L em(t),t] d λ (t) = f [λ (t), λ (t),L λ (t);e (t), e (t),L e (t),t] , k , m 2 2 1 2 1 2 dt L d λ (t) = f [λ (t), λ (t),L λ (t);e (t), e (t),L e (t),t] , k , m k 1 2 1 2 dt k
假定某一物理系统可用如下微分方程表示 dk dk−1 d r(t) + a1 k−1 r(t) +L+ ak−1 r(t) + ak r(t) k dt dt dt dk dk−1 d = b0 k e(t) +b k−1 e(t) +L+bk−1 e(t) +bke(t) 1 dt dt dt 此系统为k 阶系统,输入信号的最高次导数也为k 此系统为 阶系统,输入信号的最高次导数也为 次 系统函数为 k k−1 b0s +b s +L+bk−1s +bk 1 H(s) = k s + a1sk−1 +L+ ak−1s + ak 为便于选择状态变量, 为便于选择状态变量,系统函数表示成 b0 +b s−1 +L+bk−1s1−k +bk s−k 1 H(s) = 1+ a1s−1 +L+ ak−1s1−k + ak s−k