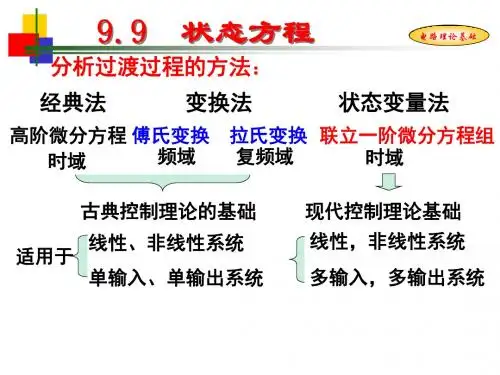
系统的状态方程
- 格式:doc
- 大小:628.50 KB
- 文档页数:27
第三章 线性系统的运动分析§3-1线性连续定常齐次方程求解一、齐次方程和状态转移矩阵的定义1、齐次方程状态方程的齐次方程部分反映系统自由运动的状况(即没有输入作用的状况),设系统的状态方程的齐次部分为:)()(t Ax t x= 线性定常连续系统:Ax x =2、状态转移矩阵的定义齐次状态方程Ax x = 有两种常见解法:(1)幂级数法;(2)拉氏变换法。
其解为)0()(x e t x At ⋅=。
其中Ate 称为状态转移矩阵(或矩阵指数函数、矩阵指数),记为:At e t =)(φ。
若初始条件为)(0t x ,则状态转移矩阵记为:)(00)(t t A e t t -=-Φ对于线性时变系统,状态转移矩阵写为),(0t t φ,它是时刻t ,t 0的函数。
但它一般不能写成指数形式。
(1)幂级数法设Ax x= 的解是t 的向量幂级数 +++++=kk t b t b t b b t x 2210)(式中 ,,,,,k b b b b 210都是n 维向量,则+++++=-1232132)(k k t kb t b t b b t x)(2210 +++++=kk t b t b t b b A故而有:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧======00323021201!1!31312121b A k b b A Ab b b A Ab b Ab b K K2且有0)0(b x =。
故+++++=kk t b t b t b b t x 2210)(+++++=k k t b A k t b A t Ab b 020200!1!21 )0()!1!21(22x t A k t A At I kk +++++=定义:∑∞==+++++=022!1!1!21K k k k k Att A k t A k t A At I e则)0()(x e t x At ⋅=。
(2)拉氏变换解法将Ax x= 两端取拉氏变换,有 )()0()(s Ax x s sx =- )0()()(x s x A sI =- )0()()(1x A sI s x ⋅-=-拉氏反变换,有)0(])[()(11x A sI L t x ⋅-=-- 则])[()(11---==A sI L e t At φ【例3.1.1】 已知系统的状态方程为x x⎥⎦⎤⎢⎣⎡=0010 ,初始条件为)0(x ,试求状态转移矩阵和状态方程的解。
状态方程和输出方程状态方程和输出方程是系统理论中的重要概念,用于描述动态系统的行为。
状态方程描述了系统的状态如何随时间变化,而输出方程则描述了系统的输出如何由状态决定。
在这篇文章中,我们将详细介绍状态方程和输出方程的概念、推导方法和应用。
一、状态方程状态方程又称为状态空间方程或系统方程,用数学表示为:x(t)=A·x(t-1)+B·u(t)其中,x(t)为系统的状态向量,表示系统在其中一时刻的状态;A为状态转移矩阵,描述了系统的状态如何随时间变化;x(t-1)为系统在上一时刻的状态;B为输入矩阵,描述了外部输入信号如何影响系统的状态;u(t)为外部输入信号,表示系统在其中一时刻的输入。
状态方程的物理意义是描述系统的动态行为。
通过状态方程,我们可以了解系统的状态如何由前一时刻的状态和当前的输入决定。
状态方程是描述系统动态行为的基础,可以用于系统的建模、分析和控制。
推导状态方程的方法有两种:物理建模和数学建模。
物理建模是通过系统的物理原理和方程来推导状态方程;数学建模是通过对系统的输入输出进行数学分析,从而推导出状态方程。
物理建模适用于具有物理背景的系统,如机械系统、电路系统等;数学建模适用于所有类型的系统。
二、输出方程输出方程又称为观测方程或测量方程,用数学表示为:y(t)=C·x(t)其中,y(t)为系统的输出向量,表示系统在其中一时刻的输出;C为观测矩阵,描述了系统的输出如何由状态决定;x(t)为系统在其中一时刻的状态。
输出方程的物理意义是描述系统的输出如何由状态决定。
通过输出方程,我们可以了解系统的输出如何与系统的状态相关。
输出方程是描述系统的输出特性的关键,可以帮助我们理解系统的性能和行为。
推导输出方程的方法有直接测量和模型匹配。
直接测量是通过对系统的输出进行实际测量,从而得到输出方程;模型匹配是通过对系统进行数学建模,从而推导出输出方程。
直接测量适用于系统的输出直接可测量的情况;模型匹配适用于系统的输出无法直接测量或想要通过模型进行预测的情况。

《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得2221332222213*********1x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有 相应的模拟结构图如下:1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++=1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图(2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P (或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=14222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P ) 当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P 1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P 当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--23132313311201214p p p p p p解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为 (1)⎥⎦⎤⎢⎣⎡=11b 解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
系统动力学方程
1. 状态方程
状态方程描述系统状态随时间的变化规律,其一般形式为:
dx/dt = f(x, u, t)
其中,x表示系统状态变量,u表示控制变量,t表示时间。
2. 输出方程
输出方程描述系统输出与状态变量之间的关系,其一般形式为:
y = g(x, u, t)
其中,y表示系统输出变量。
3. 微分代数方程组
对于复杂系统,状态方程和输出方程组合在一起构成微分代数方程组。
4. 线性和非线性方程
根据方程中变量的组合形式,系统动力学方程可分为线性方程和非线性方程。
线性方程具有较好的解析性质,而非线性方程往往需要采用数值计算等方法求解。
系统动力学方程的建模过程包括对系统进行深入分析、提取关键因素、建立模型框架、确定参数等步骤。
合理的系统动力学方程有助于全面把握系统的内在运行机理,为系统优化提供科学指导。
状态变量分析法的优点:1. 便于观察系统内部某些物理量的变化过程;2. 与系统的复杂程度无关,复杂系统和简单系统的数学模型相似,适于多输入多输出系统;3. 适于研究非线性或时变系统。
因为一阶微分方程或差分方程是研究非线性和时变系统的有效方法。
4. 便于研究系统的稳定性、可控性、可观测性及系统内部参数变化对系统特性的影响;5. 状态方程都是一阶微分方程或差分方程,便于采用数值解法在计算机上实现系统分析。
系数矩阵由系统的参数决定,非时变系统为常数,时变系统为时间的函数。
,A B 四、输出方程(output equation))(,),(),(21t y t y t y r Λ输出方程是由状态变量和激励信号的线性方程,因此对线性系统而言,输出方程是一组线性方程。
例如,假设系统有个输出,r mrm r r n rn r r r mm n n mm n n e d e d e d x c x c x c t y e d e d e d x c x c x c t y e d e d e d x c x c x c t y +++++++=+++++++=+++++++=ΛΛMΛΛΛΛ22112211222212122221212121211112121111)()()(则,A B矩阵形式为:)(10081910120010321'3'2'1t e x x x x x x ⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01000112198⎡⎤⎢⎥∴=⎢⎥⎢⎥---⎣⎦A 依此方法选择的状态变量常称为相变量状态变量,状态方程叫相变量状态方程。
状态方程和输出方程中的系数矩阵与输入输出方程有关。
[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3210410)(x x x t y 001⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦B []1040=C 0=D矩阵形式为:1211012110''13'22'1)()(+--+++=+----====m m n n n nn x b x b x b t y t e x a x a x a x x xx x x x ΛΛM )(1000100010211210''2'1t e x x x a a a a x x x n n n ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-M M ΛM ΛΛM[]001111n n n n n nb b a b b a b b a b --∴=---=C D L 当时,矩阵不再为0。
系统状态方程
1 系统状态方程
系统状态方程是在工程中描述变化规律的一种动态建模方法,它
可以帮助工程师把简单的线性方程互相联系起来,构建成复杂的模型,以便对系统进行分析和研究。
系统状态方程是建立系统模型的基本元件,其中的主要概念是状
态量(state variable),即系统的内部特性。
系统的状态量用抽象
的函数来表达,称为状态方程。
这个状态方程由输入量(Inputs)、
参数量(Parameters)、状态变量(State Variables)和输出量(Outputs)4个部分构成,它们用系统的定性规律和定量规律表达出来。
系统状态方程用来描述系统的状态,用以求解系统的活动,它的
重要性体现在它能够把抽象的系统变成一系列清晰定义的工程参数,
从而使人们可以得到关于系统的更深入的理解。
由于它的抽象特性,
系统状态方程可以很容易地用于不同的工程领域,而不用担心过多关
注参数的具体含义。
系统状态方程是一种简洁而强大的动态模型,它可以用来分析对
于不同系统的活动情况,并据此对它们做出合理的控制或决策。
现今
的复杂系统的设计和分析都离不开系统状态方程,它是工程技术发展
的重要组成部分。
第2章 系统的状态空间描述输入输出:可测量,欠全面§2.1 基本概念 例2.1 密封水箱 1()(),y t x t μ=1d [()()]d [()()]d c x u t y t t u t x t t μ⋅=-⋅=-⋅即μ2(m )c 3()(m /s)u t 3()(m /s)y t ()(m)x t11()()()x t x t u t c cμ'=-+.解tt ccx t x u c 001()e ()e d τμμττ-⎛⎫=+ ⎪ ⎪⎝⎭⎰.若()u t r ≡, 则0()e 1e ,()ttc cx t x r r t μμμμ--⎛⎫=+-⇒→∞ ⎪ ⎪⎝⎭, 若想()x h ∞=, 只要()hu t μ=.例2.2 LRC123()()();i t i t i t =+ ()()()()()L R L C u t v t v t v t v t =+=+选1()()C i t v t 和;则: 11()()()1()()()C C C Li t v t u t Cv t i t v t R '=-+⎧⎪⎨'⎪=-⎩ 其余2()()/,C i t v t R =()()(),()().L C R C v t u t v t v t v t =-=)(t v C )(t v L L R C )(1t i )(t u )(2t i )(3t i 2.2图1. 系统的状态变量状态变量: 完全表征系统,个数最少的一组变量 未来()x t :由0()x t 和0t t ≥的()u t 完全确定. 对定常, 常取00t =. 2. 状态向量和状态空间 状态向量:12()(),(),()Tn x t x t x t x t =⎡⎤⎣⎦状态空间:()x t 取值范围 状态轨线:()x t 的轨迹(无时间轴) 3.几点说明(1) 0()x t 和0(),u t t t ≥决定()x t , 0t t ≥(2) n 阶’微分方程’可引出n 个状态变量, 不唯一. (3) 尽选可测量. 离散系统类似.列写方法:‘微方’,’差方’→状态方程; ‘传函’,’流程图’→状态方程.§2.2 线性连续系统的状态空间模型状态方程 + 输出方程;1.一般形式n 维状态()x t , r 维输入()u t , m 维输出()y t ,状态方程 ()()()x t Ax t Bu t =+ (2.3) 输出方程 ()()()y t Cx t Du t =+ (2.4)12()()()()n x t x t x t x t ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦, 12()()()()r u t u t u t u t ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦, 12()()()()m y t y t y t y t ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦,111212122212n n n n nn a a a a a a A a a a ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦,111212122212r r n n nr b b b b b b B b b b ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ 状态矩阵 输入矩阵111212122212n n m m mn c c c c c c C c c c ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦,111212122212r rm m mr d d d d d d D d d d ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦. 输出矩阵 输入输出矩阵(1)若A 、B 、C 和D 都是常数阵, 则系统是定常的; 否则为时变的;(2)若1r =且1m =,则系统是单变量的;否则是多变量的 简记 {A , B , C , D } 如水箱系统:{}111,,,,,,0A B C D c c μμ⎧⎫=-⎨⎬⎩⎭.如LRC 系统状态方程:1111()()()11()()()C C C i t v t u t L Lv t i t v t C C R ⎧'=-+⎪⎪⎨⎪'=-⎪⎩,输出方程:311()()()C i t i t v t R=-,若1L R C ===,则有[]011,,11,0110A B C D -⎡⎤⎡⎤===-=⎢⎥⎢⎥-⎣⎦⎣⎦.2. 由’微方’ 状态模型 设()(1)()(1)1101n n m m n m m ya ya y a yb ub u----++++=+10b u b u +++(1)若m =0, 则可(1)123,,,,n n x y x y x y x y-====,得 1223(1)1()01121,,,,n n n n n n n x y x x y x x y x x y a x a x a x u ---==⎧⎪==⎪⎪⎨⎪==⎪==----+⎪⎩即1122011010000()00101n n n x x x x u t x a a a x -⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⋅+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦, []12()100[,,,]Tn y t x x x =⋅.令12()n x x x t x ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦,01101000,,00101n A B a a a -⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦[]100C =,0D =,则有()()()x t Ax t Bu t =+, (2.6) ()()y t Cx t =. (2.7)例2.3 设5612y y y y u +++=,试写出状态模型. 解 令123,,x y x y x y ===,则122231231265x x x x x x x x u=⎧⎪=⎨⎪=---+⎩ 所以11223301000010()12651x x x x u t x x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⋅+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦, []123()100x y t x x ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦. (2) 1m n ≤< (设初始条件全为0) 拉变 ()()()Y s G s U s =, 即110()()()m m m m Y s b s b sb Y s --=+++(*)其中1101()()n n n Y s U s s a sa --=+++对应()(1)110,n n n ya ya y a y u --'++++=是情形(1), 故取(1)123,,,,n n x y x y x y x y-====可得状态方程. 改写(*)式得1101()()m m m m Y s Y s b s b s b --=+++(**)由初值性质110(0)lim ()1lim lim ()0(0)0s m m s s m m y sY s sY s y b s b s b →∞-→∞→∞-==⋅=⋅=+++同理(1)(0)(0)(0)0m y y y-====, 故对(**)作逆变换()(1)10m m m m y b yb yb y --=+++01121m m b x b x b x +=+++,由此得112211010000()00101n n n x x x x u t x a a a x -⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⋅+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦, ()[00][,,,,,]01121T y t b b b x x x x m n m =⋅+(3) 当m n = 传递函数为11100110()()()()n n n n n n n n n b b a s b b a Y s b U s s a s a -----⎡⎤-++-=+⎢⎥+++⎣⎦11100110()()()()n n n n n n n n n b b a s b b a b U s U s s a s a ------++-=++++12()()Y s Y s =+.其中1()()n Y s b U s =,111002110()()()()n n n n n n n n b b a s b b a Y s U s s a s a ------++-=+++. 为情形(2), 故200111112()[,,,]n n n n n Tn y t b b a b b a b b a x x x --=---⎡⎤⎣⎦⋅,综合得001111()n n n n n y t b b a b b a b b a --=---⎡⎤⎣⎦12[,,,]Tn n x x x b u ⋅+例2.4 求323y y y u u ''''++=-的状态空间模型. 解 2,1n m ==,1122()()010()()()231x t x t u t x t x t ⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦,[]12()()31()x t y t x t ⎡⎤=-⎢⎥⎣⎦. 注 情形(3)是情形(1)和(2)的推广或说(1)和(2)都是(3)的特例.例2.5 设2y t y u +=. 试求状态模型. 解 令12,x y x y ==, 则{1221,2,x x x tx u ==-+即112201002x x u x x t ⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦,12[10]x y x ⎡⎤=⎢⎥⎣⎦.注: 状态矩阵是时变的.2. 传递函数→状态模型 传递函数→微分方程→状态模型.例2.6 设22253()54s s G s s s ++=++,写出其状态模型.解 易得 54253y y y u u ''''''++=++, 由情形(3), 得1122()()010()()()451x t x t u t x t x t ⎡⎤⎡⎤⎡⎤⎡⎤=⋅+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦,[]12()()552()()x t y t u t x t ⎡⎤=--+⎢⎥⎣⎦.3. 信号流程图→状态模型 设有下图将1s→⎰, s →t , 得注: 积分器出口是状态变量.⎰5)(t u )(t y +-2⎰++--1x 1x 2x2x s15)(s U )(s Y +-2s 1++--由前图得112122x x ux x x =-+⎧⎨=-⎩, 125y x x =-.注 状态模型不唯一. 如由前2图另得2153()11232s G s s s s s -⎛⎫=-= ⎪++++⎝⎭, 改为541/1/()542112/11/s sG s s s s s=-=⋅-++++,等价于下图5)(t u )(t y 2++--⎰1x 1x 2x 2x ⎰4+-易得1122d 25d d 4d x x u tx x ut⎧=-+⎪⎪⎨⎪=-+⎪⎩, 12y x x =-, 即2001A -⎡⎤=⎢⎥-⎣⎦,54B ⎡⎤=⎢⎥⎣⎦,[]11C =-. 又有微分方程323y y y u u ++=-,是(2)的情形,故12212,23,x x x x x u ⎧=⎪⎨=--+⎪⎩ 123y x x =-+, 对应0123A ⎡⎤=⎢⎥--⎣⎦,01B ⎡⎤=⎢⎥⎣⎦,[]31C =-. 故原系统可有3种数学模型 4.状态方程 传递函数 作拉变, 并设(0)0x =,则()()()sX s AX s BU s =+,()()()Y s CX s DU s =+,由(2.18)式得1()()()X s sI A BU s -=-代入(2.19),有()1()()Y s C sI A B D U s -⎡⎤=-+⎣⎦,从而传递函数阵()1()G s C sI A B D -=-+.当1m r ==, ()G s 是传递函数.小结n阶微分方程⇔传递函数⇔状态模型⇔状态流程图。