第三章 系统分析-状态方程的解
- 格式:ppt
- 大小:534.00 KB
- 文档页数:27
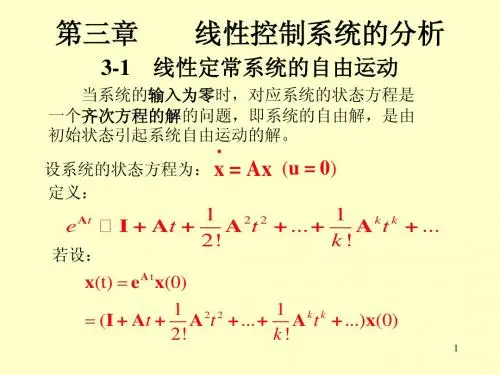
第三章 系统的分析——状态方程的解§3-1线性连续定常齐次方程求解一、齐次方程和状态转移矩阵的定义1、齐次方程状态方程的齐次方程部分反映系统自由运动的状况(即没有输入作用的状况),设系统的状态方程的齐次部分为:)()(t Ax t x= 线性定常连续系统:Ax x= 初始条件:00x x t ==2、状态转移矩阵的定义齐次状态方程Ax x = 有两种常见解法:(1)幂级数法;(2)拉氏变换法。
其解为)0()(x e t x At ⋅=。
其中At e 称为状态转移矩阵(或矩阵指数函数、矩阵指数),记为:At e t =)(φ。
若初始条件为)(0t x ,则状态转移矩阵记为:)(00)(t t A e t t -=-Φ 对于线性时变系统,状态转移矩阵写为),(0t t φ,它是时刻t ,t 0的函数。
但它一般不能写成指数形式。
(1)幂级数法——直接求解设Ax x= 的解是t 的向量幂级数 +++++=k k t b t b t b b t x 2210)(式中 ,,,,,k b b b b 210都是n 维向量,是待定系数。
则当0=t 时, 000b x x t ===为了求其余各系数,将)(t x 求导,并代入)()(t Ax t x = ,得:+++++=-1232132)(k k t kb t b t b b t x)(2210 +++++=k k t b t b t b b A上式对于所有的t 都成立,故而有:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧======00323021201!1!31312121b A k b b A Ab b b A Ab b Ab b K K且有:00x b =故以上系数完全确定,所以有:+++++=k k t b t b t b b t x 2210)(+++++=k k t b A k t b A t Ab b 020200!1!21)0()!1!21(22x t A k t A At I kk +++++=定义(矩阵指数或矩阵函数):∑∞==+++++=022!1!1!21K kk k k AttA k t A k t A At I e则)0()(x e t x At⋅=。
现代控制理论智慧树知到课后章节答案2023年下长安大学长安大学绪论单元测试1.下列语句中,不正确的是()。
A:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
B:现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统;C:20世纪50年代中期,空间技术的迅速发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题;D:在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法;答案:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
2.通过测量输出量,产生一个与输出信号存在函数关系的信号的元件称为()。
A:给定元件B:放大元件C:反馈元件D:比较元件答案:比较元件3.闭环控制系统的控制方式为()。
A:按扰动信号控制B:按输入信号控制C:按偏差信号控制D:按反馈信号控制答案:按偏差信号控制4.经典控制理论描述系统的数学模型是由高阶线性常微分方程演变来的传递函数,适合分析和设计下列哪种系统()A:非线性系统B:单输入单输出系统C:线性定常系统D:多输入多输出系统答案:单输入单输出系统;线性定常系统5.现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,比经典控制理论所能处理的控制问题要广泛得多,适合分析和设计下列哪种系统()A:非线性系统B:线性时变系统C:多输入多输出系统D:线性定常系统答案:非线性系统;线性时变系统;多输入多输出系统;线性定常系统第一章测试1.系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的()A:对 B:错答案:对2.多输入-多输出系统的U-Y 间的传递函数为()A:错 B:对答案:对3.由一个状态空间模型可以确定多个传递函数。

《控制工程基础》电子教案第一章:绪论1.1 课程介绍了解控制工程的概念、内容和研究方法理解控制工程在工程实践中的应用和重要性1.2 控制系统的基本概念定义系统、输入、输出和反馈区分开环系统和闭环系统1.3 控制工程的目标掌握稳定性、线性、非线性和时变性等控制系统的特性学习控制系统的设计方法和步骤第二章:数学基础2.1 线性代数基础掌握向量、矩阵和行列式的基本运算学习线性方程组和特征值、特征向量的求解方法2.2 微积分基础复习极限、连续性和微分、积分的基本概念和方法应用微积分解决实际问题2.3 复数基础了解复数的概念、代数表示法和几何表示法学习复数的运算规则和复数函数的性质第三章:控制系统分析3.1 传递函数定义传递函数的概念和性质学习传递函数的绘制和解析方法3.2 频率响应分析理解频率响应的概念和特点应用频率响应分析方法评估系统的性能3.3 根轨迹分析掌握根轨迹的概念和绘制方法分析根轨迹对系统稳定性的影响第四章:控制系统设计4.1 控制器设计方法学习PID控制器的设计原理和方法了解模糊控制器和神经网络控制器的设计方法4.2 控制器参数调整掌握控制器参数调整的目标和方法应用Ziegler-Nichols方法和频域方法进行参数调整4.3 系统校正和优化理解系统校正的概念和目的学习常用校正方法和优化技术第五章:现代控制理论5.1 状态空间描述了解状态空间的概念和表示方法学习状态空间方程的求解和状态反馈控制5.2 状态估计和最优控制掌握状态估计的概念和方法学习最优控制的目标和求解方法5.3 鲁棒控制和自适应控制理解鲁棒控制的概念和特点了解自适应控制的设计方法和应用场景第六章:线性系统的稳定性分析6.1 稳定性的定义和性质理解系统稳定性的概念和重要性学习稳定性分析的基本方法6.2 劳斯-赫尔维茨准则掌握劳斯-赫尔维茨准则的原理和应用应用劳斯-赫尔维茨准则判断系统的稳定性6.3 李雅普诺夫方法了解李雅普诺夫方法的原理和分类学习李雅普诺夫第一和第二方法判断系统的稳定性第七章:线性系统的控制器设计7.1 控制器设计概述理解控制器设计的目标和重要性学习控制器设计的基本方法7.2 PID控制器设计掌握PID控制器的设计原理和方法应用PID控制器进行系统控制7.3 状态反馈控制器设计了解状态反馈控制器的设计原理和方法学习状态反馈控制器的设计和应用第八章:非线性控制系统分析8.1 非线性系统概述理解非线性系统的概念和特点学习非线性系统分析的基本方法8.2 非线性系统的描述方法学习非线性系统的数学模型和描述方法应用非线性系统分析方法研究系统的性质8.3 非线性控制系统的应用了解非线性控制系统在工程实践中的应用学习非线性控制系统的设计和优化方法第九章:鲁棒控制理论9.1 鲁棒控制概述理解鲁棒控制的概念和重要性学习鲁棒控制的基本方法9.2 鲁棒控制设计方法掌握鲁棒控制设计的原则和方法应用鲁棒控制设计方法设计控制器9.3 鲁棒控制在控制系统中的应用了解鲁棒控制在实际控制系统中的应用学习鲁棒控制在控制系统中的设计和优化方法第十章:控制系统仿真与实验10.1 控制系统仿真概述理解控制系统仿真的概念和重要性学习控制系统仿真的基本方法10.2 MATLAB控制系统仿真掌握MATLAB控制系统仿真工具的使用应用MATLAB进行控制系统仿真和分析10.3 控制系统实验了解控制系统实验的目的和重要性学习控制系统实验的方法和技巧重点和难点解析重点环节1:控制系统的基本概念和特性控制系统的基本概念,包括系统、输入、输出和反馈区分开环系统和闭环系统掌握稳定性、线性、非线性和时变性等控制系统的特性重点环节2:传递函数和频率响应分析传递函数的概念和性质,传递函数的绘制和解析方法频率响应的概念和特点,频率响应分析方法分析根轨迹对系统稳定性的影响重点环节3:控制器设计方法和参数调整控制器设计方法,包括PID控制器、模糊控制器和神经网络控制器的设计原理和方法控制器参数调整的目标和方法,应用Ziegler-Nichols方法和频域方法进行参数调整重点环节4:状态空间描述和最优控制状态空间的概念和表示方法,状态空间方程的求解和状态反馈控制状态估计和最优控制的目标和求解方法重点环节5:非线性控制系统分析和鲁棒控制理论非线性系统的概念和特点,非线性系统分析的基本方法鲁棒控制的概念和重要性,鲁棒控制的基本方法重点环节6:控制系统仿真与实验控制系统仿真的概念和重要性,控制系统仿真的基本方法MATLAB控制系统仿真工具的使用,应用MATLAB进行控制系统仿真和分析控制系统实验的目的和重要性,控制系统实验的方法和技巧全文总结和概括:本教案涵盖了控制工程基础的十个章节,主要包括控制系统的基本概念和特性、传递函数和频率响应分析、控制器设计方法和参数调整、状态空间描述和最优控制、非线性控制系统分析和鲁棒控制理论以及控制系统仿真与实验。
求状态方程的时域解状态方程(State Equation)是描述动态系统的数学模型,它能够描述系统的状态如何随时间变化。
在控制论中,求解状态方程的时域解在设计和分析控制系统中具有重要意义。
本文将介绍状态方程的定义、求解方法以及时域解的计算过程。
状态方程的定义状态方程是用微分方程的形式表示的动态系统。
一般形式的状态方程可以表示为:dx(t)/dt = A(t) * x(t) + B(t) * u(t)其中,x(t)是状态向量,表示系统在时间t的状态,u(t)是输入向量,表示在时间t的输入,A(t)和B(t)是矩阵,它们表示系统的动态特性。
该方程描述了系统状态的变化率以及输入对状态的影响。
解法求解状态方程的时域解需要通过求解微分方程来获取。
具体的解法主要有两种:利用拉普拉斯变换求解和利用差分方程求解。
1. 利用拉普拉斯变换求解在连续时间域中,可以利用拉普拉斯变换来求解状态方程的时域解。
具体步骤如下:1.将状态方程中的微分方程用拉普拉斯变换转换为代数方程。
2.根据已知的初始条件,建立方程的初始条件。
3.根据所求解的变量进行移项整理,求解出未知变量的表达式。
4.对拉普拉斯域变换的结果进行逆变换,得到时域解。
2. 利用差分方程求解在离散时间域中,可以利用差分方程来求解状态方程的时域解。
具体步骤如下:1.将状态方程中的微分方程用差分方程转换为代数方程。
2.根据已知的初始条件,建立方程的初始条件。
3.根据差分方程的表达形式,利用递推关系计算出未知变量的取值。
4.得到差分方程的解,并将其转换为时域解。
时域解的计算过程下面将以连续时间域为例,介绍求解状态方程的时域解的计算过程。
1. 利用拉普拉斯变换求解假设我们有一个一阶线性连续时间不变系统,状态方程为:dx(t)/dt = A * x(t) + B * u(t)其中x(t)是一个列向量,u(t)是输入的标量,A和B是常数矩阵。
首先,我们将方程两边进行拉普拉斯变换,得到:sX(s) - x(0) = A * X(s) + B * U(s)其中X(s)和U(s)是x(t)和u(t)的拉普拉斯变换,s是拉普拉斯变换的复变量。
自动控制原理状态方程知识点总结自动控制原理中的状态方程是描述系统动态行为的一种数学模型。
通过分析系统的输入和输出,可以利用状态方程来预测系统的响应和稳定性。
本文将对状态方程的基本概念、求解方法以及应用进行总结。
一、状态方程的基本概念状态方程(State Equation)是指用代表系统参数和输入的变量来描述控制系统中元件状态随时间变化的关系表达式。
一般形式如下所示:dx(t)/dt = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)其中,x(t)表示状态向量,代表系统的状态变量;u(t)为输入向量,指系统的输入信号;y(t)为输出向量,代表系统的输出信号;A、B、C、D为系统的参数矩阵。
二、状态方程的求解方法1. 直接求法:通过系统的关系方程,将所有元件的微分方程组合在一起,得到状态方程。
这种方法适用于简单且线性的系统。
2. 简化求法:对于线性定常系统,可以使用拉普拉斯变换将微分方程转换为代数方程,然后通过代数求解的方法得到状态方程。
3. 传递函数转换法:对于已知系统的传递函数,可以通过传递函数转换为状态方程的形式。
通过分子多项式的展开和分母多项式的因式分解,得到状态方程的形式。
三、状态方程的应用1. 系统分析:通过状态方程可以推导系统的稳定性、响应特性等。
可以通过分析系统的状态转移矩阵,判断系统的稳定性和控制性能。
2. 系统设计:利用状态方程可以进行系统的控制器设计。
可以通过选择适当的状态反馈增益矩阵,使系统满足不同的控制要求。
3. 系统仿真:借助计算机仿真工具,可以利用状态方程对系统进行仿真分析,模拟不同输入下系统的响应和稳定性,从而指导实际系统的控制设计。
总结:状态方程是自动控制原理中的重要概念,能够用数学模型描述系统的动态行为。
掌握状态方程的基本概念、求解方法和应用,对于理解和设计控制系统具有重要意义。
通过本文的介绍,相信读者已经对状态方程有了更深入的理解和认识。
让我们在自动控制原理的学习中更加游刃有余,应用自如。