三轴稳定云台图示
- 格式:doc
- 大小:215.00 KB
- 文档页数:4

适用于GoPro HERO5 / GoPro HERO4 / Session或其它尺寸相近的运动摄像机FY WG2 三轴穿戴式稳定器桂林飞宇科技股份有限公司V 1.1CN 使 用 说 明!WG2 特别说明WG2有精密机械转动机构,防水设计可以完全满足淋雨和泼水场景使用,在一定条件下可以在水中使用。
在水中使用时请按照下面要求做,否则有损坏云台的风险。
1.下水前确保USB胶塞已盖好,使用后搽干放置通风处晾干再充电。
3. 在海水环境使用有损坏风险,不建议使用。
2. 在水下使用时,水深不超过0.5m,连续使用时间不超过5分钟。
4.如果接触了海水,必须立即用清水冲洗,在淡水中侵泡3分钟,否则海水风干后会结晶导致云台转动阻塞。
注※机身防水涂料,有少量刺激性异味,如果有少量液体流出或有异味属于正常现象。
3漂流游泳212入门指南1安装相机将运动相机装上,并拧紧手拧螺丝。
2开 / 关机长按功能键,绿灯亮起后松开。
长按功能键,红灯快闪至常亮后松开。
注意:相机安装稳固后才能开机1/4英寸螺丝孔位产品概览*本产品不包含图示的运动相机1/4英寸螺丝孔位防水34相机右置前置方式相机右置悬挂方式立式方式App下载及连接12连接App 下载App5在手机应用商城搜索 “Feiyu ON” 下载或者用手机扫描二维码下载。
* Android版本请使用浏览器扫描二维码下载* 系统要求:iOS 9.0或更高版本,Android 6.0或更高版本iOS 版本 Android 版本(1)启动稳定器。
切换模轨迹延时镜头变焦固件升级拍照/录像定时拍照重叠影像横竖切换视频剪辑实时美颜光轨拍摄人脸锁定物体跟踪超广角全景......慢动作实时滤镜模拟摇杆跟随模式模式模式复位设置教程升级6功能/模式镜头方向保持不变。
航向跟随模式 俯仰和横滚保持方向不变,镜头随着底座转动的方向而转动。
航向和俯仰跟随模式横滚保持方向不变,镜头随着底座转动的方向而转动。


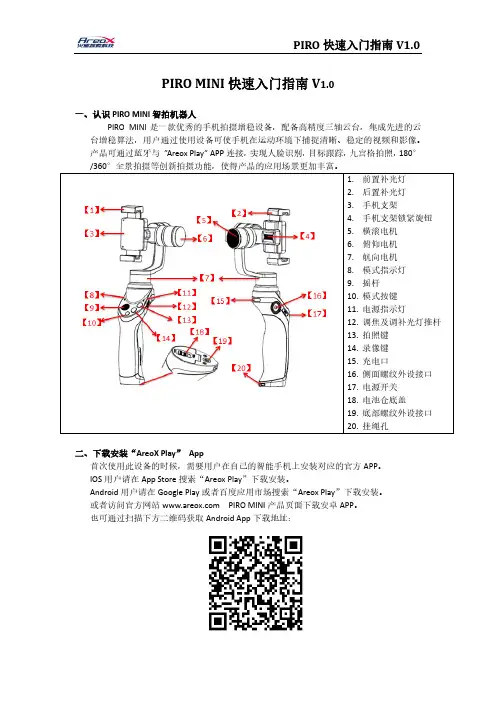
PIRO MINI快速入门指南V1.0一、认识PIRO MINI智拍机器人PIRO MINI是一款优秀的手机拍摄增稳设备,配备高精度三轴云台,集成先进的云台增稳算法,用户通过使用设备可使手机在运动环境下捕捉清晰、稳定的视频和影像。
产品可通过蓝牙与”Areox Play” APP连接,实现人脸识别,目标跟踪,九宫格拍照,180°1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.二、下载安装“AreoX Play”App首次使用此设备的时候,需要用户在自己的智能手机上安装对应的官方APP。
IOS用户请在App Store搜索“Areox Play”下载安装。
Android用户请在Google Play或者百度应用市场搜索“Areox Play”下载安装。
或者访问官方网站 PIRO MINI产品页面下载安卓APP。
也可通过扫描下方二维码获取Android App下载地址:(注意:请用手机浏览器扫描,可直接出现下载文件。
用微信扫描只会出现下载网址)三、安装电池使用设备前,需要先安装标配的智能电池。
打开电池仓底盖,将电池按图示方向推入电池仓,然后锁住电池仓底盖,保证电池稳定安装在设备中。
为保护电池,防止过放,出厂前电池均为低电量状态,请在首次使用产品前,给电池充满电,使其恢复到正常工作状态。
四、安装手机电池安装完毕,需要将手机安装在设备上。
在PIRO MINI 电源关闭状态下,调节手机支架锁紧旋钮,使手机稳定置于支架内后拧紧旋钮。
初次安装手机时请使手机右侧贴紧手机支架。
五、调整配平把安装好手机的PIRO MINI 如下图放置。
保持手柄平稳不动,若手机能自主保持水平,代表配平成功。
若左右倾斜,请按照下图操作说明配平。
六、连接“AreoX Play”APP安装配平完成,需要手机蓝牙连接“Areox Play”App,具体步骤如下:1.开启手机蓝牙功能,并解除手机屏幕旋转锁定,使手机可以横屏显示。

产品名称:室外中小型云台(图示与Y4512护罩配合使用
) 产品型号:YA3040/YD3040/YP3040
类别: 恒速云
台 1240元
产品特性:
1.选用永久型重载磁同步电机,保证较长的使用寿命,并具有云台停机保护功能
2.压铸铝合金及钢制结构,IP66防护等级
3.出线方式设计新颖(获专利)
4.32个预置位,并具备预置位扩展功能(YP型号)
5.具备自动扫描与自动巡航功能(YP型号)
6.行业、YAAN、PELCO-P/D、AD等多协议集成,波特率可选(YD、YP型号)技术指标
产品名称:室内/外小型防护罩
产品型号:YA4512/YA4515
类别: 摄像机防护罩 350元
型号技术指标
产品名称:云台护罩支架产品型号:WS2770 类别: 配件 100元
技术指标
交流电源24V 50元。
三轴云台力矩计算全文共四篇示例,供读者参考第一篇示例:三轴云台力矩计算是指在设计和制造三轴云台时,需要计算三个轴线上所受力矩的大小和方向,以保证云台能够准确平衡和稳定地支撑相机或其他载荷。
在这篇文章中,我们将详细介绍三轴云台力矩计算的原理、方法和应用。
让我们来了解一下什么是力矩。
力矩是指力对物体产生的旋转效果,即力矩=力×力臂。
在三轴云台中,有三个轴线,即俯仰轴、横滚轴和偏航轴。
在设计三轴云台时,需要考虑到这三个轴线上所受力矩的相互作用,以保证云台能够平衡地支撑载荷,并实现稳定的运动。
三轴云台力矩计算主要包括两个方面:一是计算各轴线上的静态力矩;二是计算云台在运动过程中产生的动态力矩。
我们来看如何计算各轴线上的静态力矩。
在三轴云台中,通常会有三个电机,分别负责控制俯仰轴、横滚轴和偏航轴的运动。
在设计云台时,需要考虑到载荷对各轴线产生的力矩,从而确定电机的功率和扭矩大小。
通过计算各轴线上的静态力矩,可以确定电机的最佳配备方案,从而实现云台的稳定性和灵活性。
静态力矩的计算方法一般是通过力的合成来实现。
在三轴云台中,力来自载荷和电机本身产生的扭矩。
通过将这些力合成,可以得到各轴线上的力矩大小和方向。
在实际计算中,需要考虑到载荷的重心位置、重量、惯性力等因素,以确定各轴线所受的力矩大小。
动态力矩的计算也是三轴云台设计中的重要一环。
在云台运动时,会产生惯性力和加速度等因素,这些力矩会对云台的稳定性和响应速度产生影响。
通过计算动态力矩,可以确定云台在运动过程中所需要的反馈控制算法,从而实现云台的快速、平稳运动。
在实际应用中,三轴云台力矩计算是一个复杂的工程问题,需要结合力学、动力学、控制理论等多学科知识。
在设计三轴云台时,工程师需要考虑到载荷的大小、形状、运动方式等因素,以确定云台所需的电机功率、扭矩大小和控制策略。
三轴云台力矩计算是设计和制造三轴云台时必不可少的环节。
通过计算各轴线上的静态和动态力矩,可以实现云台的准确平衡和稳定运动,从而满足不同应用场景的需求。

三轴手机手持稳定器说明书 CN V 1.1目录1. 产品概览 (2)2. 快速体验 (3)3.充电 (4)4.横竖拍切换 (4)5.伸缩杆的使用 (5)6.三脚架 (5)7.连接 (6)8.常用操作 (10)9. 功能模式介绍 (12)10.工作模式 (13)11.指示灯 (15)12. 保护机制 (16)13. 稳定器初始化 (16)14. 参数 (17)飞宇Vimble 3是一款适配手机的三轴手持稳定器,小巧可折叠,有延长杆。
稳定器支持横拍和竖拍,可控制手机拍摄。
使用建议飞宇Vimble 3提供了以下资料,建议使用前先观看和阅读:1. 快速入门手册2. 使用说明书(电子版)教程·可在飞宇官网 https:///play/ 观看教学视频或扫描二维码前往。
·可在Feiyu ON App--[技巧]页面查看教学视频。
下载安装 Feiyu ON App在使用过程需要用到Feiyu ON App,请在手机应用商城搜索下载,或用手机扫描二维码下载。
* 系统要求: iOS 9.0或更高版本,Android 6.0或更高版本* Android版本请使用浏览器扫描二维码下载iOS Android1. 产品概览[1] 横滚轴[2] 横臂[3] 俯仰轴[4] 竖臂[5] 航向轴[6] 上扳机键 (App内可自定义)[7] 下扳机键[8] 手柄 (内置电池)[9] Type-C拓展配件口[10] 限位[11] A键[12] B键[13] 调焦键[14] 手机夹[15] 伸缩杆 (0~198mm)[16] 四向摇杆[17] 拨轮键[18] 拨轮功能切换键[19] 状态指示灯[20] 电量指示灯[21] 相册键[22] 模式键[23] 拍照/录像键[24] Type-C充电端口[25] 电源键[26] 1/4英制螺纹孔[27] 三脚架*本产品不含手机。
2. 快速体验步骤1:折叠/展开若手机倾斜,可左右移动手机至水平。
手把手超详细教你做20元成本的MWC航模飞控MWC飞控N年历史了,玩过航模的很多都做过,成本不高,制作简单,稳定性挺好,设置方便,易于上手等不少优势注定这款飞控对新手来说经久不灭啊!百度搜索教程虽然也不少,但没有几个系统的详细的,如果一点不懂的小白,要费很大功夫整理才能摸索出来。
这款飞控支持很多模型:三轴、四轴、六轴、八轴、单旋翼、双旋翼、固定翼、V尾、甚至云台等,都支持!这里我就整理了常用的四轴无刷、四轴有刷、固定翼固件。
鉴于很多重复的设置,这三样我一块写,想做的仔细看,注意代码修改和接线区分就行了。
末尾附件也有我修改好的三种代码,各位可以测试下,我用的是pro mini 328p和gy521最低配置,这配置做出来成本算运费都不到20元。
其他贵的模块我没用过,我感觉没必要了,这种DIY的飞控练手玩玩即可,再贵了真不如买成品了,成品有大把的好飞控。
教程最下面有需要用到的所有工具下载!一,焊接模块。
就两个模块,焊接只需要简单接线就行,下面我把各种飞机的接线上图,按照图示接好线就行。
有刷电机的正极直接连动力电池,负极连MOS管,还有有刷电机尽量并联104电容和二极管,图中我没画,当时忘了。
二,电脑安装所需要的编程软件JAVA和arduino。
三,附件的工具中有JAVA和arduino安装程序,32位系统和64位系统的程序都有,注意区分安装即可,这里就不详细说了。
先安装JAVA再安装arduino。
三、arduino修改MWC程序。
下面连接中有我修改好的,可以省略修改步骤直接刷到328用,也有官方原版的和程序。
由于我当时用固件时不正常,我修改好的全是版本的,一样用。
修改的具体步骤按以下图示一步一步操作就行,有需要注意的地方我会说明:如果是固定翼要修改下这里如果是有刷四轴要修改下这里。
这里是调整舵机方向的,比如用在固定翼上时,舵机的左右摆动不对,可以修改这里。
哪项不对,就改哪项的符号(X或Y前面的负号),例如发现 ACC里PITCH方向不对,那就把上面的accADC[PITCH]= -Y改成accADC[PITCH]= Y,其他同理。
此PDF电子文档支持以下功能**需阅读软件支持,以AdobeReader为例。
WEEBILL 3说明书Z H I Y U N -C N -v 1 . 0 0Contents■■产品清单产品清单■ (1)■■认识WEEBILL■3认识WEEBILL■3■ (4)■■电池及充电说明电池及充电说明■ (5)■■安装及调平安装三脚架■ (6)安装相机■ (6)安装鳞甲伸缩提壶手柄和鳞甲省力腕托(以下简称”提壶手柄”和“腕托”)■ (10)安装手机夹■ (12)平衡调节■ (13)■■WEEBILL■3的使用按键功能■ (17)显示屏界面说明■ (18)图标功能解释■ (19)菜单选项说明■ (20)电机力度参数调节■ (23)工作模式说明■ (24)手调定位■ (28)更换补光灯滤光片■ (28)内置麦克风使用说明■ (29)搭配鳞甲图传发射机■AI(■以下简称”发射机■AI”)■使用■ (29)■■APP的使用下载APP■ (32)如何连接■ (32)APP主要功能介绍■ (33)■■固件升级与校准哪些情况下需要校准■ (34)六面校准方法■ (34)角度微调■ (37)固件升级■ (37)■■参数说明■■免责声明与警告阅读提示■ (41)警告■ (41)安全操作指引■ (41)■■保修卡质保期限说明■ (44)质保不包括■ (44)为获得智云(ZHIYUN)质保服务,请按下列步骤操作■ (44)■■联络卡自助扫码返修售后产品清单使用本产品前,请仔细检查产品包装内是否包含以下所有物品,若有缺失,请联系客“*”代表购买 微毕3 相机智能云台 标准套装包含此配件。
“**”代表购买 微毕3 相机智能云台 COMBO套装包含此配件。
认识WEEBILL 3认识WEEBILL 31.上层快装板锁定开关2.上层快装板锁紧扳手3.上层快装板4.下层快装板5.快装板锁紧扳手6.相机安装扳手7.快装板安全锁8.⽔平安装底座9.快装板⽔平调节座锁紧扳手10.航向轴锁定开关11.航向轴电机12.云台摇杆13.拍照/录像键14.模式切换键15.云台底座16.提壶手柄/手机夹安装螺孔17.俯仰轴电机18.相机/图传控制接⼝19.音频传输接⼝20.横滚轴电机21.横滚轴锁定开关22.显⽰屏23.云台手柄24.电源键25.三脚架26.俯仰轴锁定开关27.跟焦器控制接⼝28.内置⻨克⻛29.航向轴锁紧扳手30.菜单/返回键31.补光灯控制拨轮32.腕托安装螺孔33.补光灯34.相机镜头支架35.相机镜头支架锁紧螺丝36.快装板⽔平调节座37.⽔平安装底座锁紧螺丝38.扳机键39.滚轮40.固件升级/充电接⼝电池及充电说明电池及充电说明WEEBILL 3 采用内置电池,首次使用前,请先给 WEEBILL 3 充满电以激活电池,保证产品顺利使用。
无人机警用系统解决方案一、无人机警用系统行业概述1.行业概述无人机凭借成本低、易操纵、高度灵活和稳定等优点,能够完成空中监控、日常巡逻、搜索跟踪等任务,受到了警务部门的青睐。
公安干警和武警利用无人机来应对突发的社会事件,交警部门则用无人机来进行交通方面的管理,特警部门则利用无人机进行空中侦察抓捕罪犯等工作。
总之,警用无人机在未来将会协助各个警察部门在公共安全领域发挥更为重要的作用。
2.行业应用【1】无人机在社区民警领域的应用一般而言,社区民警时公安派出所从事治安防范、管理和沟通群众的主要力,主要承担的职责有六项,即开展群众工作、掌握社情民意、管理实际人口、组织安全防范以及维护治安秩序、应急救助等服务。
对于管辖范围较大、人口较为密集的地区,无人机的装备无疑为社区民警的工作带来了极大的提升。
(1)公共领域的常规巡查对于片区治安来说,巡查是社区民警必不可少的一项工作。
但是对于管辖区域大、人口密集且分散分布的地区,由于警务力量不足等因素,可能造成巡查存在漏洞,给犯罪分子以可乘之机。
无人机一般可携带多种警务设备,包括高清数码摄像机、夜视仪等,可以帮助社区民警对管辖区域进行定时定线地巡查。
不仅可以节省警务力量,而且有利于公安部门及时掌握相关区域的公共安全状况。
(2)大型集会的监控无人机可对会场空中监控,提供高清画面,并可以快速机动到任何需要的区域上空,搜索发现地面可疑人员、车辆,提供强有力的空中情报保障。
将视频图像实时传输回指挥中心,指挥中心根据无人机传输回的资料对现场实时掌控,一旦发现突发情况,无人机可以第一时间发现,极大地提高了应急处理效率。
(3)聚众闹事事件的监控无人机飞抵事故目标区域上空对目标区域进行全方位不间断的监控,为公安干警全面掌控事态提供了先决条件。
警方可根据无人机拍摄的资料对事故责任方进行举证,同时可以了解目标区域的事件发展情况,及时形成相应的决策,防止事态失控。
(4)应对突发媒介失灵事件面对因谣言而发生的群众聚集事件,无人机加装空投装置后,能进行特殊物品的投送,如播撒传单,向地面人员传递信息,达到辟谣效果。
三轴云台运动学建模全文共四篇示例,供读者参考第一篇示例:三轴云台是一种常用于航空摄影和无人机等设备中的重要部件,其主要作用是对摄像头或其他设备进行稳定控制,从而拍摄出更加清晰、稳定的影像。
在实际应用中,三轴云台的运动学建模是至关重要的,可以帮助我们更好地了解其运动规律,并设计出更加高效稳定的控制算法。
本文将对三轴云台的运动学建模进行详细介绍。
一、三轴云台的结构和工作原理三轴云台通常由三个轴组成,包括俯仰轴、横滚轴和偏航轴。
俯仰轴控制摄像头在竖直平面上的倾斜角度,横滚轴控制摄像头在水平平面上的旋转角度,而偏航轴则用于控制摄像头在水平平面上的方向。
通过对这三个轴进行精确的控制,可以实现对摄像头姿态的稳定调整。
三轴云台的工作原理主要是通过内部的传感器来感知设备当前的姿态,然后通过电机驱动来调整摄像头的位置,从而保持其稳定。
具体来说,通过陀螺仪、加速度计等传感器对设备当前的角度和加速度进行监测,然后通过控制电机的转动来实现对设备姿态的调整,使其保持在所需的角度范围内。
二、三轴云台的运动学建模三轴云台的运动学建模是指通过数学方法对其运动规律进行描述和分析,从而为后续的控制算法设计提供基础。
在进行运动学建模时,需要考虑以下几个方面的因素:1. 坐标系的选择:在进行三轴云台的运动学建模时,需要选择适当的坐标系来描述设备的姿态和位置。
通常情况下,会选择惯性坐标系和设备坐标系两种坐标系,通过它们之间的转换关系来描述设备的运动。
2. 姿态表示:三轴云台的姿态可以通过欧拉角、四元数等方式进行表示。
欧拉角是通过设备相对于三个坐标轴的旋转角度来描述姿态,而四元数则是通过一个复数来表示设备的方向。
在建模时,需要选择适合自己的姿态表示方式进行描述。
3. 运动方程的建立:通过实际测量和分析,可以建立出三轴云台在不同控制模式下的运动方程。
这些方程通常由设备的姿态、角速度和加速度等参数来描述,可以帮助我们更加清晰地了解设备的运动规律。
力图专业稳中求变思锐PH-20悬臂云台作者:暂无来源:《摄影之友·影像视觉》 2012年第6期撰文/摄影:曲上编辑:乔枫伟要拍摄灵动的鸟儿,笨重的长焦镜头是否让你苦不堪言?一款操作方便、质量过硬的悬臂云台是你最好不过的搭档。
今天我们来看看思锐这款云台的能耐,PH-20能为我们带来怎样的保障和便利?使用超长焦镜头的时候,重量是阻碍我们发挥的关键因素。
要等待一只飞来的鸟儿,你不可能举着几公斤的长焦镜头静等几个小时。
此时拍摄者需要稳定的支撑,脚架和云台是必不可少的附件。
选择脚架相对简单,我们需要脚管较粗的大型脚架,但是云台种类多样,而且有很多球形云台与三维云台的最大承重都能满足我们的要求。
那么我们为什么要选择昂贵的悬臂云台?在拍摄中,超长焦的视野范围非常小,我们需要平滑、精准的调节角度。
换而言之,云台的阻尼要很大,方向定位要精准,球形云台无法做到单方向快速调整,球体虽然灵活,但支点面积小,不利于定位。
而三维云台的弊端则是调节缓慢,它不适合拍摄动态物体,因为你需要同时调节三个维度的方向才能重新得到新的构图。
悬臂云台通过特殊的结构,通过悬臂和支架,将重心控制、方向调节精准性和便利操作结合起来。
下面我们就来看看思锐PH-20的能耐。
做工不让外国云台当你把数万元的长焦镜头完全托付给悬臂云台的时候,镜头是“悬空”吊在支架上的,所以云台的重心控制异常重要,它决定了云台的使用寿命和镜头的安全性。
思锐悬臂云台的做工非常不错,无论是表面的工艺还是阻尼控制部件,都达到了很高的水准。
思锐PH-20悬臂云台由悬臂主体、镜头支架和快装板组成。
悬臂主体采用了碳纤维的结构,和合金相比,它的体积更轻,坚韧程度也更高。
云台的其他部件采用金属为材料,旋钮上套有橡胶,方便操作。
这款云台的自重为1.09千克,最大承重20千克。
这个参数足以满足绝大多户使用者的要求,除了适马15.7千克的200-500mm f/2.8之外,大多数的超长焦镜头都在5千克左右,我们用来测试的尼康200mm f/2自重2.9千克,加上机身,也不超过4千克,云台悬臂的形变非常小,支架在支撑时也显得游刃有余。
中文摘要中文摘要随着小型无人直升机在低空航拍领域的广泛应用,消费者对航拍质量提出了更高的要求。
但无人机飞行姿态受外界气流等因素的干扰,严重影响航拍质量。
本文以三轴机载云台为研究对象,对机载云台的增稳控制进行了深入研究。
本文分析和介绍了机载云台的结构特性和增稳控制的工作原理,分析了三轴机载云台的数学模型,构建了以 Cortex-M3 微控制器为主控芯片、MEMS 运动传感器为云台姿态检测单元、直流无刷电机为执行单元的增稳云台姿态控制系统。
在此基础上讨论了云台姿态解算算法。
在控制算法上,本文提出了将滑模变结构控制算法应用在机载云台的控制系统中,使用扰动观测器预估系统的干扰并补偿。
并在MATLAB的Simulink中搭建仿真模型,通过试验分析了经典PID控制器、线性滑模控制器和非奇异终端滑模控制器的跟踪性能。
综合仿真结果可知,非奇异终端滑模控制器能更好满足三轴机载云台的增稳控制要求。
最后,制作了三轴机载云台的样机,并对云台进行测试。
测试表明,该云台各系统软硬件运行良好,达到了良好的增稳效果。
关键字:机载云台,姿态控制,滑模变结构控制,直流无刷电机- I -AbstractAbstractWith the wide application of small unmanned helicopters in the field of low-altitude aerial photography,consumers have put forward higher requirements for aerial photography quality. However,the flight attitude of the drone is disturbed by factors such as external airflow,which seriously affects the aerial photography quality. In this paper,the three-axis airborne PTZ is taken as the research object, and the stability control of the airborne PTZ is deeply studied.This paper analyzes and introduces the structural characteristics of the airborne platform and the working principle of the stabilization control. It analyzes the mathematical model of the three-axis airborne platform and constructs the Cortex-M3 microcontroller as the main control chip and the MEMS motion sensor. The pan-tilt attitude detection unit and the DC brushless motor are the stabilization and pan/tilt attitude control systems of the execution unit. Based on this,the PTZ attitude solving algorithm is discussed.In the control algorithm,this paper proposes to apply the sliding mode variable structure control algorithm to the control system of airborne pan/tilt, and use the disturbance observer to predict the interference and compensation of the system. The simulation model is built in Simulink of MATLAB. The tracking performance of classical PID controller, linear sliding mode controller and non-singular terminal sliding mode controller is analyzed through experiments. The comprehensive simulation results show that the non-singular terminal sliding mode controller can better meet the stability control requirements of the three-axis airborne pan/tilt.Finally,a prototype of a three-axis airborne head was produced and tested on the gimbal. Tests show that the software and hardware of the PTZ system are running well and have achieved good stability.Keywords: loading airborne, attitude control,sliding mode variable structure control, DC brushless motor目 录目录中文摘要 (I)Abstract (II)第1章绪论 (1)1.1课题背景及研究意义 (1)1.2国内外研究现状分析 (2)1.2.1国外研究现状分析 (2)1.2.2国内研究现状分析 (3)1.2.3三轴机载云台增稳控制方法 (5)1.3 本文主要研究内容 (5)第2章三轴机载结构分析及姿态解算 (7)2.1三轴机载云台结构 (7)2.2机载三轴云台姿态解算研究 (9)2.2.1参考坐标系 (9)2.2.2姿态解算算法选择 (10)2.3姿态角更新 (13)2.4本章小结 (16)第三章三轴机载云台数学建模 (17)3.1三轴机载云台模型 (17)3.1.1三轴机载云台建模 (17)3.2直流电机的线性建模 (18)3.2.1电机的选型分析 (18)3.2.2直流无刷电机的等效电路 (20)3.2.3直流无刷电机基本公式 (21)3.3机载云台各环节模型 (22)3.4 PID控制策略分析 (23)目录3.4.1经典的PID控制 (23)3.4.2机载云台PID仿真 (25)3.5本章小结 (26)第4章三轴机载云台的滑模变结构控制 (27)4.1变结构控制简介 (27)4.1.1变结构及滑模变结构简介 (27)4.1.2滑模变结构控制定义 (28)4.1.3三轴机载云台模型简化 (29)4.2三轴机载云台的线性滑模控制 (29)4.2.1普通线性滑模控制原理 (29)4.2.2线性姿态环滑模控制律的设计 (29)4.2.3收敛性分析 (31)4.3基于非奇异终端滑模变结构姿态环滑模控制器研究 (33)4.3.1非奇异终端滑模控制基本原理 (33)4.3.2非奇异终端滑模控制律的设计 (33)4.3.3收敛性分析 (34)4.4基于观测器的非奇异终端滑模控制算法的改进 (40)4.5本章小结 (42)第五章软硬件设计及样机测试 (43)5.1增稳云台控制器的方案叙述 (43)5.2硬件系统设计 (43)5.2.1主控模块硬件设计 (43)5.2.2运动检测模块设计 (45)5.2.3电机驱动模块设计 (47)5.2软件系统设计 (48)5.3姿态控制算法仿真分析仿真分析 (50)5.3.1阶跃信号仿真及跟踪性能分析 (50)目录5.3.2正弦信号仿真及跟踪性能分析 (52)5.3.3基于干扰观测器非奇异终端滑模控制器性能分析 (53)5.4样机及测试结果 (54)5.5本章小结 (55)第六章结论 (56)参考文献 (58)致谢 (64)独创性声明 (66)第1章 绪论第1章绪论1.1课题背景及研究意义目前,低空领域的航拍技术在很多领域都有重要的应用,比如高层建筑外观质量检验,高桥下部桥面裂缝检测,海洋测绘,森林防火,地震、山洪等地质灾害的搜索、支援和营救等工作。
V3978-‐0001 P ro-‐25E2011 Issue 1Operator M anual用户手册Copyright © P ower P lus S tudio W orks L td. 2011Pro-‐25E V R E nabled P an T ilt Head前言首先感谢阁下选用Pro-‐25E摄像机云台,这是⼀一个针对虚拟图像应用的带位置跟踪手动云台,基于云顿Protouch系列Pro-‐25云台,配用了高质量的高分辨率光学编码器,与VRT-‐100虚拟数据接口配合就能为虚拟图像系统提供准确及高精度的虚拟定位数据。
Pro-‐25E云台使用云顿久经考验的Vision梦幻轻型云台技术,包括完美动态平衡及润滑摩擦阻尼两个关键技术,让云台的操作及使用达到广播级的最高水平,通过更换动态平衡弹簧的设计,让不同重量的摄像机组合都能达致完美动态平衡,承重范围14~26Kg,可配合绝大部分演播室配置的便携摄像机,无论是否配用台词提示器。
我们相信,Pro-‐25E的性能表现必定能让你满意,并会在⼀一段长时间内为你忠诚服务。
安全注意当相关的内容对用户的安全有关时,这个标志就会出现,请仔细阅读。
部件参照(1) 在内文中如果看到这个括号内的数字,请参照部件位置上的图示废弃电池的处理这个云台内装置有⼀一次性的电池,在电池的容量用完后,请不要与⼀一般家居废物同时处理,务必参照处理废旧电池的相关规定妥善处理,以免对环境造成污染。
技术参数云台重量: 6.4Kg手柄重量: 0.4Kg高度: 220mm宽度: 180mm长度: 160mm最大承重: 26Kg,动态平衡弹簧套装内还包括 - 14Kg,16Kg,18Kg,22Kg俯仰范围: +/-‐ 90 ∘水平范围: 360 ∘云台安装: 标准云顿四孔平底,Quickfix兼容编码器分辨率: 1,638,400个脉冲/360 ∘,俯仰及水平相同编码器数据输出: Fischer D104 A094 130 ,19针插座,随机配VRT-‐100连线 (0.5M)摄像机安装: 标准可推拉托板,带安全锁及两颗3/8”螺丝手柄: 标准手柄 (两根)颜色: RAL9005哑光黑水平气泡: 带照明 (9V 电池供电)阻尼调整: 连续可调题词器安装: 兼容标准Autoscript撑杆的插孔 (两个)部件位置1.水平锁2.手柄安装孔3.摄像机平台水平位置锁4.可推拉托板释放按钮5.俯仰锁紧钮6.题词器撑杆锁紧钮 (两个)7.题词器撑杆插孔 (两个)8.可推拉托板9.3/8”摄像机托板安装螺丝 (两颗)10.可推拉托板缩紧钮11.手柄12.俯仰编码器13.动态平衡弹簧窗口封盖14.水平气泡照明开关按钮15.水平气泡16.水平阻尼调整钮17.移动零位参考点18.固定零位参考点19.动态平衡弹簧固定螺丝 (3mm)20.编码器输出插座21.动态平衡弹簧22.俯仰阻尼调整钮23.水平气泡照明供电电池封盖24.水平编码器25.Quickfix适配环26.四孔平底安装底座 (在底部)安装云台Pro-‐25E的安装底座是四孔平底的 (24) 带兼容Quickfix适配器的适配环 (18),安装Pro-‐25E云台你需要⼀一个带四孔平底的三角架,例如Power Plus的HST-‐3S或云顿的HD系列三角架,⼀一般的四孔平底三角架都带了固定云台用的四颗3/8”螺丝,只需使用合适的工具把云台锁紧在三角架上就可以,否则就要使用适配器。
acceleration estimation and compensation are added to the system control loop.It’s indicated the three-axis pan-tilt control requirements can be met by the design of the cloud axis platform control system which is robust to anti-interference and control accuracy is high.Keywords:Three-axis pan-tilt;Sage-Husa adaptive filtering algorithm;UD decomposition; motion acceleration estimation and compensation;fuzzy PID目录摘要 (I)Abstract (II)第一章绪论 (1)§1.1课题研究背景及意义 (1)§1.2稳定云台国内外研究现状 (2)§1.3稳定云台控制方法分析 (2)§1.4课题研究内容及论文结构 (3)第二章三轴云台系统模型描述 (5)§2.1三轴云台结构原理 (5)§2.2三轴云台姿态角描述 (5)§2.3三轴云台控制系统模型建立 (7)§2.4三轴云台扰动力矩分析 (8)§2.5本章小结 (8)第三章姿态测量传感器数据融合算法 (9)§3.1姿态测量与数据融合 (9)§3.2Sage-Husa自适应滤波算法 (9)§3.3UD分解方法 (11)§3.4改进的Sage-Husa自适应滤波器 (12)§3.4.1系统模型设计 (12)§3.4.2测量方程 (12)§3.4.3观测方程 (13)§3.4.4基于UD分解算法的Sage-Husa自适应滤波计算步骤 (14)§3.5仿真实验与结果分析 (14)§3.5.1采用单位阶跃信号作为仿真信号 (15)§3.5.2实际采集数据的对比试验 (17)§3.6本章小结 (19)第四章运动加速度抑制算法 (20)§4.1运动加速度模型 (20)§4.1.1运动加速度模型 (20)§4.1.2运动加速度估计 (20)§4.1.3姿态及运动加速度更新 (21)§4.1.4补偿算法的理论依据 (21)§4.1.5补偿算法的收敛性及其改进 (21)§4.2仿真验证 (22)§4.3实物验证 (24)§4.4本章小结 (26)第五章三轴云台控制器设计 (27)§5.1三轴云台PID控制器设计 (27)§5.1.1PID控制理论基础 (27)§5.1.2基于PID算法的三轴云台设计 (28)§5.2基于模糊PID的三轴云台控制 (29)§5.2.1模糊PID控制理论基础 (29)§5.2.2模糊控制器设计 (31)§5.2.3基于模糊PID的姿态控制 (36)§5.3仿真实验与结果分析 (37)§5.3.1Matlab/Simulink仿真 (37)§5.3.2仿真实验与结果分析 (37)§5.4本章小结 (39)第六章三轴云台总体设计与验证 (40)§6.1三轴云台控制算法的改进 (40)§6.2仿真验证 (42)§6.3三轴云台硬件验证平台介绍 (44)§6.3.1硬件整体设计 (44)§6.3.2主控芯片 (45)§6.3.3惯性测量模块 (45)§6.3.4电机控制模块 (46)§6.3.5PWM模块 (47)§6.3.6电源模块设计 (47)§6.4三轴云台控制器的可靠性设计 (48)§6.5本章小结 (48)第七章总结与展望 (50)§7.1总结 (50)§7.2展望 (51)参考文献 (52)致谢 (55)作者在攻读硕士期间主要研究成果 (56)第一章绪论第一章绪论§1.1课题研究背景及意义机载三轴云台是机载相机的载体,用于稳定机载相机,在对地观测时使机载相机能够获取高精度、无失真的对地观测影像,是机载测绘技术的重要研究方向之一。