二自由度简易云台增稳控制系统设计
- 格式:doc
- 大小:378.00 KB
- 文档页数:3
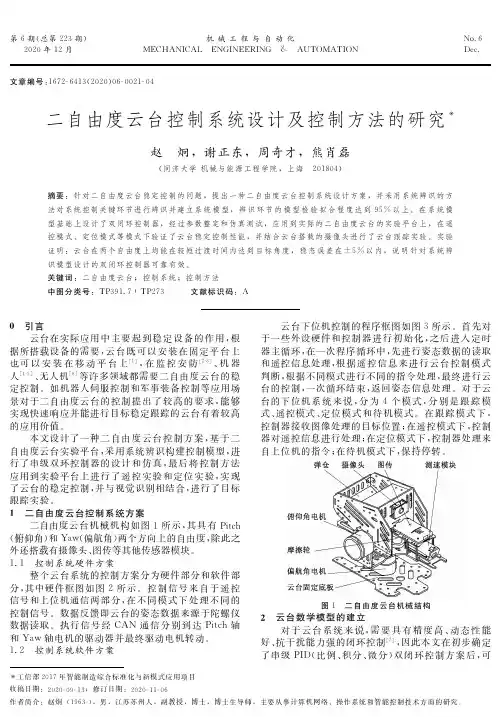
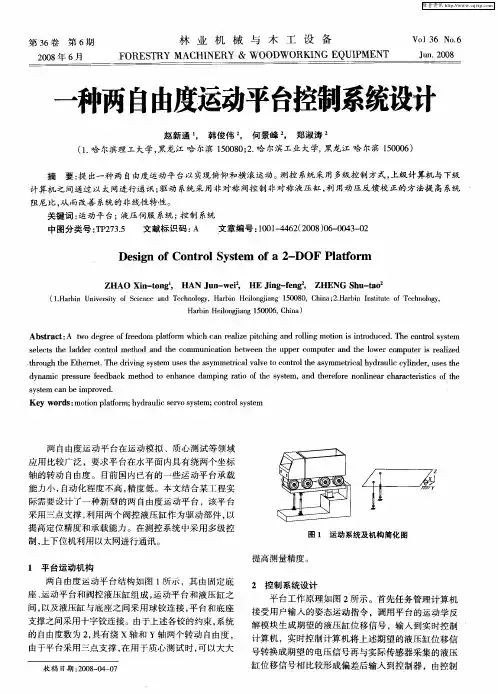
第6期(总第223期)2020年12月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.6Dec.文章编号:1672 6413(2020)06 0021 04櫜二自由度云台控制系统设计及控制方法的研究赵 炯,谢正东,周奇才,熊肖磊(同济大学机械与能源工程学院,上海 201804)摘要:针对二自由度云台稳定控制的问题,提出一种二自由度云台控制系统设计方案,并采用系统辨识的方法对系统控制关键环节进行辨识并建立系统模型,辨识环节的模型检验拟合程度达到95%以上。
在系统模型基础上设计了双闭环控制器,经过参数整定和仿真测试,应用到实际的二自由度云台的实验平台上,在遥控模式、定位模式等模式下验证了云台稳定控制性能,并结合云台搭载的摄像头进行了云台跟踪实验。
实验证明:云台在两个自由度上均能在较短过渡时间内达到目标角度,稳态误差在±5%以内,说明针对系统辨识模型设计的双闭环控制器可靠有效。
关键词:二自由度云台;控制系统;控制方法中图分类号:TP391.7∶TP273 文献标识码:櫜A工信部2017年智能制造综合标准化与新模式应用项目收稿日期:2020 09 13;修订日期:2020 11 06作者简介:赵炯(1963),男,江苏苏州人,副教授,博士,博士生导师,主要从事计算机网络、操作系统和智能控制技术方面的研究。
0 引言云台在实际应用中主要起到稳定设备的作用,根据所搭载设备的需要,云台既可以安装在固定平台上也可以安装在移动平台上[1],在监控安防[2 3]、机器人[4 5]、无人机[6]等许多领域都需要二自由度云台的稳定控制。
如机器人伺服控制和军事装备控制等应用场景对于二自由度云台的控制提出了较高的要求,能够实现快速响应并能进行目标稳定跟踪的云台有着较高的应用价值。
本文设计了一种二自由度云台控制方案,基于二自由度云台实验平台,采用系统辨识构建控制模型,进行了串级双环控制器的设计和仿真,最后将控制方法应用到实验平台上进行了遥控实验和定位实验,实现了云台的稳定控制,并与视觉识别相结合,进行了目标跟踪实验。
二自由度云台原理云台是一种能够实现自由旋转的装置,常用于机器人、航空航天、摄影和导航等领域。
其中,二自由度云台是指可以在水平方向和垂直方向上进行旋转的云台。
本文将介绍二自由度云台的工作原理及其应用。
二自由度云台的工作原理是基于两个旋转轴的运动,其中一个轴用于水平旋转,另一个轴用于垂直旋转。
这两个轴的旋转可以通过电机、伺服机构或步进电机等方式实现。
云台上安装有传感器和控制系统,用于感知和控制云台的运动。
在二自由度云台中,水平旋转轴通常被称为横摆轴,垂直旋转轴通常被称为俯仰轴。
横摆轴和俯仰轴的旋转可以分别控制云台的水平和垂直方向上的视角。
例如,在机器人领域,二自由度云台可以用于携带摄像头,实现机器人的视觉感知和目标跟踪。
二自由度云台的应用非常广泛。
在航空航天领域,二自由度云台可以用于航天器的姿态控制,以保持航天器的稳定性。
在摄影领域,二自由度云台可以用于相机的稳定拍摄,使拍摄的画面更加清晰和稳定。
在导航领域,二自由度云台可以用于车辆的视觉导航,帮助车辆感知周围环境并做出相应的决策。
二自由度云台的控制方法有多种,常见的方法包括开环控制和闭环控制。
开环控制是指根据预先设定的旋转参数控制云台的旋转,但无法实时感知云台的实际旋转情况。
闭环控制是指通过传感器感知云台的旋转角度,然后根据目标旋转角度进行控制,以实现更精确的控制效果。
在实际应用中,二自由度云台的设计和控制需要考虑多个因素。
首先是云台的稳定性和精度,云台需要能够稳定地旋转,并能够准确地控制旋转角度。
其次是云台的载荷能力,云台需要能够承受相应的载荷,并保持稳定。
此外,云台的控制系统需要具备较高的实时性和可靠性,以满足实际应用的需求。
二自由度云台是一种能够实现水平和垂直旋转的装置,广泛应用于机器人、航空航天、摄影和导航等领域。
通过合理的设计和控制,二自由度云台可以实现稳定的旋转和精确的控制,为各种应用提供了重要的支持和保障。
无人机云台稳定系统研究与控制算法设计无人机是一种主要通过无线电通信遥控或内置自主控制计算机飞行的飞行器,其广泛应用于民用和军事领域。
无人机在近年来迅速发展,使得已经初具规模的无人机市场成为了人们关注的热点话题。
然而,随着无人机技术的迅速发展,无人机云台稳定系统研究与控制算法设计也逐渐成为了无人机研究的核心问题之一。
一、无人机云台稳定系统研究1. 云台结构云台是无人机载荷运输和精确控制的关键部分,稳定性是云台的最基本要求。
从机械结构的角度来看,云台主要由云台控制器、切向式电机、云台支撑构架、旋翼舵机以及传感器组成。
旋翼舵机的重点在于云台的摆动,包括俯仰、横滚和偏航运动。
切向式电机负责控制云台的旋转方向,传感器则是获取无人机姿态变化的数据以便调整控制系统。
2. 控制系统控制系统也是无人机云台稳定系统的重要组成部分,以选择嵌入式系统作为云台的控制核心。
嵌入式系统自带高速处理器芯片,能够进行较为复杂的控制算法设计,同时也能进行数据采集和通信。
嵌入式系统不仅具有较高的计算速度和实时性,还能够应对不同运动场景下的运动轨迹,确保云台的稳定性。
控制算法方面的设计主要包括几种基本的优化控制方法,如PID控制和LQR控制。
二、控制算法设计1. PID控制PID控制全称为比例积分微分控制,是一种传统的控制算法,在工业控制中广泛应用。
PID控制按照误差的比例、积分、微分三个参数对功率进行控制,以达到稳定控制目的。
其中,比例环节是误差和控制结果的比例,积分环节是误差和控制位置的累计,微分环节是上次误差和上次控制结果的差。
PID控制方法具有计算简单、易于调整、实用性高的特点,常用于稳定运动系统。
2. LQR控制LQR控制全称为线性二次调节控制,是一种优化控制方法。
LQR控制不仅具有PID控制算法的特点,还能够优化系统的状态控制。
LQR控制利用最小二乘法以及状态控制理论,对误差进行优化控制。
通过调整状态的权重矩阵,不断求解控制器矩阵,优化控制系统的状态。
云台两自由度控制作者:04——715班王天指导老师:李云台是搭载激光测距仪座,摄像头座,机械手座之物,为这些仪器部件提供更大的适用范围。
此品主要采用蜗轮蜗杆的结构来作为传动机构。
其优点是可以得到很大的传动比,比交错轴斜齿轮机构紧凑,因为线接触,故承载能力比交错轴斜齿轮大得多,另外传动平稳无噪音,这样仿生蛇可以执行更隐蔽的任务。
还有蜗杆的到程角r小于轮齿间的当量摩擦角时,机构具有自锁性,即只能由蜗杆带动蜗轮,而不能有蜗轮带动蜗杆,这样便于抬板稳定在某一位置工作。
而蜗轮蜗杆将纵向转动变为侧向转动方可以使我们的布局更合理。
当然蜗轮蜗杆机构也具有一定的缺点,(1)齿合时相对滑动速度v较大,以磨损,以发热股效率低,而对于具有自锁性的蜗杆传动其效率更低。
(2)为了散热和减小摩擦,常需贵重的抗磨材料和良好的润滑装置,故成本较高(3)蜗杆的轴向力较大。
看起来去点多多,但在我们的设备本身的运作状况下这些也便不再是缺点了。
首相我们的设备转速要求不大,阻力也不大,并不要求时刻保持运作,因此以磨损,易发热,效率较低情况便可忽略。
也因如此便不用采用贵重的材料了,所以成本的问题也便不再成为问题。
因为阻力不大,轴向力大的问题也便不是问题了。
我们用的电机是瑞士产的ZGR17AL支流减速电机。
每分钟转速15转。
正好可以迎合我们的设备不需要告诉运作的要求,而起匀速,慢速转动的特性,可以很好的进行控制,在开环控制的情况下获得较大的精度。
控制用数字化控制,利用双极坐标控制,(X,Y).X为底盘转角。
Y为台办的转角。
X介于0度到360度之间,Y介于0度到90度之间。
我们并没有安装测算转过角度的设备,我们通过测算电机转动时间来推算转过的角度,此过程在我们要求转动精度不高的情况下是一种很实用经济有效的手法。
我们的转盘上安装一个触碰开关,这样在每次反应前,反转,当碰及触碰开关时停止,以此作为基准。
这个既为校准的过程,此位置作为0度。
在开始转动命令要求的角度。
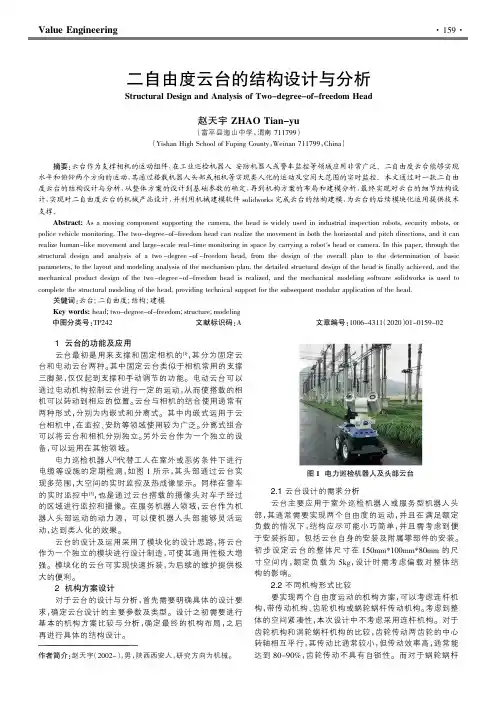
图1电力巡检机器人及头部云台
云台设计的需求分析
云台主要应用于室外巡检机器人或服务型机器人头其通常需要实现两个自由度的运动,并且在满足额定负载的情况下,结构应尽可能小巧简单,并且需考虑到便于安装拆卸,包括云台自身的安装及附属零部件的安装。
初步设定云台的整体尺寸在150mm*100mm*80mm
额定负载为5kg,设计时需考虑偏载对整体结
不同机构形式比较
要实现两个自由度运动的机构方案,可以考虑连杆机带传动机构、齿轮机构或蜗轮蜗杆传动机构。
体的空间紧凑性,本次设计中不考虑采用连杆机构。
对于齿轮机构和涡轮蜗杆机构的比较,齿轮传动两齿轮的中心转轴相互平行,其传动比通常较小,但传动效率高,80-90%,齿轮传动不具有自锁性。
而对于蜗轮蜗杆
图2二自由度云台的结构模型
结构设计与分析
对于二自由度云台的结构设计,从动力源、
和执行机构三部分进行设计分析。
动力源部分主要是指电机的选型和参数的确定,传动部分为机械结构设计的核心主要包括带传动及蜗轮蜗杆传动中参数的确定和分执行部分分别为两个自由度末端的法兰,通过法兰与外部器件连接实现两个自由度的运动。
电机的选型
对于电机的选型设计,在实际工业中集成的电机类型主要包括直流电机、伺服电机及步进电机等。
其中,
机和伺服电机具备高转速、低扭矩的特点,而步进电机通常转速较低,且力矩较大。
对于二自由度云台机构,
常使用在巡检或服务机器人头部,其具备速度低、
的力矩较高的特点,因此在本次设计中选用步进电机作为云台的动力输出[5]。
考虑到云台的整体尺寸和负载大小,选型
步进电机均可为两个方向运动提供动力。
蜗轮蜗杆及带传动设计。
![飞行器二自由度稳像云台[实用新型专利]](https://uimg.taocdn.com/f30e033fc1c708a1294a4455.webp)
专利名称:飞行器二自由度稳像云台专利类型:实用新型专利
发明人:仝昊天
申请号:CN200720103340.2
申请日:20070125
公开号:CN201002722Y
公开日:
20080109
专利内容由知识产权出版社提供
摘要:飞行器二自由度稳像云台,包括一个检测装置,一个动作装置和一个图像采集装置,所述检测装置与所述动作装置电连接,所述动作装置与图像采集装置固定连接,所述检测装置用于检测飞行器的摆动角度,所述动作装置用于对检测装置的检测结果作相应的调整动作。
将本实用新型装载在飞行器上,能做到飞行器晃动,而摄像镜头不随之晃动,从而具有稳定,跟踪,锁定图像的作用,也可以对交通工具的抖动做出微调。
申请人:仝昊天
地址:100081 北京市海淀区中关村南大街5号
国籍:CN
代理机构:北京海虹嘉诚知识产权代理有限公司
代理人:张涛
更多信息请下载全文后查看。
二自由度水下云台自适应控制方法
王晓鸣;王成才;武天龙;王昌强
【期刊名称】《舰船科学技术》
【年(卷),期】2022(44)14
【摘要】为了解决船载多波束声呐的姿态稳定问题,设计一款双自由度水下云台。
在保留传统水下云台定位模式的基础上,通过增加自适应模式来补偿波浪对声呐姿
态的影响,并提出了阶梯速度PID自适应控制方法。
根据距离目标角度的大小选择
匹配的速度梯度,引入PID对水下云台实时调节,通过自身调整使其稳定在保持角度。
水下模拟实验结果表明:定位模式下,水下云台2个自由度均能以18°/s的速度快速稳定到达目标角度,角度误差为0.4°;自适应模式下,搭载声呐的俯仰自由度能在较短的时间内稳定在保持角度,保持误差为1°,证明了控制方法的有效性。
【总页数】6页(P89-94)
【作者】王晓鸣;王成才;武天龙;王昌强
【作者单位】天津科技大学机械工程学院;河北工业大学机械工程学院;天津瀚海蓝
帆海洋科技有限公司
【正文语种】中文
【中图分类】TP13
【相关文献】
1.七自由度水下机械手自适应控制系统的研究
2.基于Modbus协议和MATLAB GUI的二自由度云台运动状态参数监控
3.二自由度云台的结构设计与分析
4.二自
由度云台控制系统设计及控制方法的研究5.基于无剑SoC开源平台的二自由度云台控制系统
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP的控制驱动一体化二自由度机器人云台设计
张巍;吴怀宇;程磊;胡琳萍;方恒
【期刊名称】《自动化技术与应用》
【年(卷),期】2009(028)003
【摘要】本文提出了一种二自由度机器人云台的设计方案,详细闸述了该方案的硬什和软件设计.本方案选用DSP作为主控芯片,两相混合式步进电机作为执行机构,硬件电路采用控制驱动一体化设计.实验结果证明,云台具有结构简单、体积小、调速范围广,定位精度高等优点.
【总页数】4页(P107-109,120)
【作者】张巍;吴怀宇;程磊;胡琳萍;方恒
【作者单位】武汉科技大学信息科学与工程学院,湖北,武汉,430081;武汉科技大学信息科学与工程学院,湖北,武汉,430081;武汉科技大学信息科学与工程学院,湖北,武汉,430081;武汉科技大学信息科学与工程学院,湖北,武汉,430081;武汉科技大学信息科学与工程学院,湖北,武汉,430081
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于DSP电动汽车的异步电机控制驱动系统设计 [J], 黄英;殷军
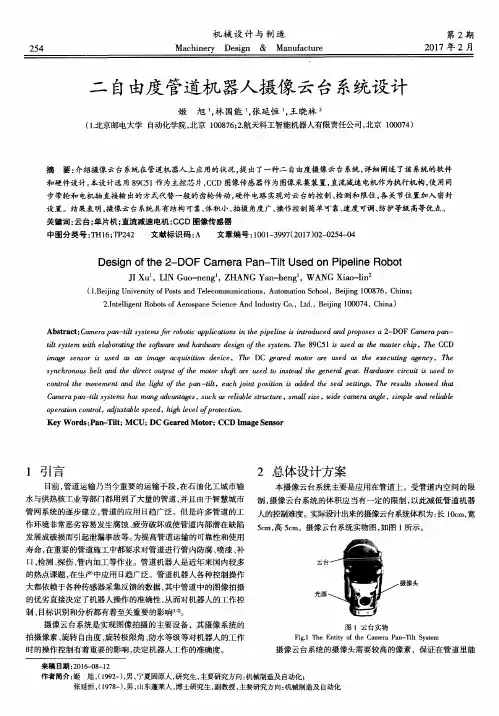
2.二自由度管道机器人摄像云台系统设计 [J], 姬旭;林国能;张延恒;王晓林
3.基于DSP两相混合式步进电机控制驱动器研究与设计 [J], 杨元凯
4.驱动伺服一体化型机器人云台系统的设计与实现 [J], 曹赢;程磊;方康玲
5.基于二自由度云台的目标跟踪系统设计 [J], 张建仓;杨哲辉;孙启富
因版权原因,仅展示原文概要,查看原文内容请购买。
二自由度简易云台增稳控制系统设计
项目简介:本课题要求学生在查阅相关资料的基础上,利用单片机、IMU姿态测量元件、舵机等设备搭建二自由度增稳控制平台,设计姿态数据的读取程序,设计舵机的控制程序,设计增稳平台的机械结构,对所设计的程序进行调试,实现云台的增稳控制。
项目方案:
本课题分以下步骤展开研究:
2014年4月~ 2014年10月
收集有单片机接口程序设计方面的资料,学习相关理论知识;
2014年11月~2014年12月
学习MWC飞行控制板的程序设计技术;
2015年1月~2015年4月
设计板载姿态传感器数据读取;
2015年5月~ 2015年8月
设计舵机控制程序和平台机械结构,测试平台增稳性能;
2015年9月~2015年10月
撰写研究报告、结题,项目鉴定。
本项目主要使用MWC飞行控制板和舵机实现二自由度平台的增稳控制
预期成果:
本项目要求完成如下成果:
设计并实现二自由度增稳平台的软、硬件系统,搭建增稳平台的机械结构,完成系统的负载测试。
完成研究报告一份。
二自由度云台概述:
云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的联结。
其英文名称为Pan-Tilt(简称PT),即可以在水平方向和俯仰方向旋转的机械装置。
主要用于安装监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接方便;在需要摇摆和摆动的机构中,如机械臂等,也利用云台来实现可接触范围的延伸和扩展。
根据云台的回转特点可以分为只能左右旋转的水平旋转平台和既能左右旋转又能上下旋转的全方位云台,即二自由度(2-Degree of Freedom)云台,简称2-DOF云台。
增稳的意义:
比如飞行器在飞行过程中,由于自身的抖动以及外界因素对它的影响,它的姿态不断变化,装在上面的图像采集装置一起变化,导致图像的不稳定。
如果采用反馈控制原理,先测量姿态变化,再传输到控制装置(舵机),达到稳像的目的。
将一个二自由度的稳像平台与遥控直升机恰当地结合在一起,实现了在飞行过程中跟踪目标稳定图像,保持图像质量的功能。
平台增稳
平台增稳是将全部的光学系统和敏感元件安装在一个用环架系统悬挂起来的台体上.并用陀螺等惯性传感器安装于台体上,形成陀螺稳定平台。
根据环架系统稳定轴的数量,可分为单轴.两轴和三轴稳定平台。
当环架的支承轴无任何干扰力矩作用时,平台将相对惯性空间始终保持在原来的方位上.当平台因干扰力矩作用而偏离原来的方位时.陀螺敏感平台变化的姿态角或角速率反馈到控制核心,经过一系列算法处理.送出控制量给环架的力矩电机.通过力矩电机产生补偿力矩对干扰力矩进行补偿,从而使平台保持稳定.而平台的稳定也就保证了其上的光学系统的视轴的稳定,即视轴的稳定是通过对整个台体的稳定来实现的,目前来看平台增稳是最有效,最实际的方案。
用Arduino编辑MWC程序,MWC是用PID算法进
行飞行稳定性控制的程序,三个字母分别代表比例(P)-积分(I)-微分(D)。
用FIDI工具把程序上传到飞控板,FIDI是一种USB转TTL电平的信号转换工具。
稳定控制算法
在工程实际中.应用最为广泛的调节器控制规律为比例、积分、微分控制.简称PID控制。
它以其结构简单、稳定性好、工作可靠、调整方便而成为自动控制的主要技术之一。
当被控对象的结构和参数不能完全掌握.或得不到精确的数学模型时.控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定.这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象.或不能通过有效的测量手段来获得系统参数时.最适合用PID 控制技术。
PID控制.实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。