第五章 稳定性理论
- 格式:pdf
- 大小:570.73 KB
- 文档页数:40
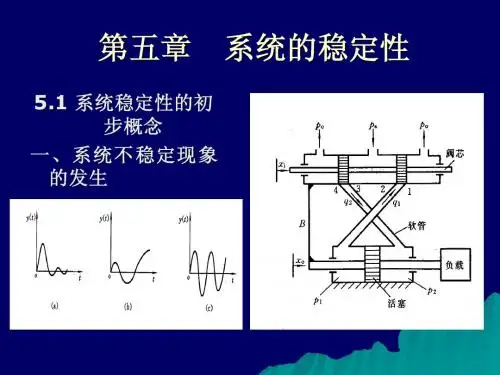
第五章系统的稳定性讲授内容5.1系统稳定的初步概念一、稳定性的定义系统稳定性是指系统在干扰作用下偏离平衡位置,当干扰撤除后,系统自动回到平衡位置的能力。
若系统在初始状态的影响下,由它所引起的系统的时间响应随着时间的推移,逐渐衰减并趋向于零(即回到平衡位置),则称系统为稳定的;反之,由它所引起的系统的时间响应随着时间的推移而发散(即偏离平衡位置越来越远),则称系统为不稳定的。
线性系统的稳定性是系统的固有特性,仅与系统的结构及参数有关;而非线性系统的稳定性不仅与系统的结构及参数有关,而且还与系统的输入有关。
二、系统稳定的充要条件系统稳定的充要条件是的系统所有特征根的实部全都小于零,或系统传递函数的所有极点均分布在s平面的左半平面内。
若系统传递函数的所有极点中,只有一个位于虚轴上,而其它极点均分布在s平面的左半平面内,则系统临界稳定。
而临界稳定的系统极易因为系统的结构或参数的细微变化而变成不稳定的系统。
因此,临界稳定往往也归结为不稳定的一种。
5.2 (劳斯)稳定判据Routh Routh 判据是判别系统特征根分布的一个代数判据。
一、系统稳定的必要条件要使系统稳定,即系统全部特征根均具有负实部,就必须满足以下两个条件:1)特征方程的各项系数都不等于零。
2)特征方程的各项系数的符号都相同。
此即系统稳定的必要条件。
按习惯,一般取最高阶次项的系数为正,上述两个条件可以归结为一个必要条件,即系统特征方程的各项系数全大于零,且不能为零。
二、系统稳定的充要条件系统稳定的充要条件是表的第一列元素全部大于零,且不能等于零。
Routh 运用判据还可以判定一个不稳定系统所包含的具有正实部的特征根的个数为表第一列元素中符号改变的次数。
Routh Routh 运用判据的关键在于建立表。
建立表的方法请参阅相关的例题或教材。
运用判据判定系统的稳定性,需要知道系统闭环传递函数或系统的特征方程。
Routh Routh Routh Routh 在应用判据还应注意以下两种特殊的情况:Routh 1.如果在表中任意一行的第一个元素为0,而其后各元不全为0,则在计算下一行的第一个元时,该元将趋于无穷大。
稳定性理论5.1 外部稳定性和内部稳定性运动稳定性分为基于I/O 描述的外部稳定性和基于状态空间描述的内部稳定性。
内容包括 外部稳定性 内部稳定性内部稳定性和外部稳定性关系(1)外部稳定性考虑以I/O 描述的线性因果系统,假定初始条件为零,外部稳定性定义如下:定义5.1 称一个因果系统为外部稳定,如果对任意有界输入u (t ),对应输出y (t )均有界,即 102(),[,]()u t t t y t ββ∀≤<∞∈∞⇒≤<∞外部稳定也称为BIBO 稳定。
定理5.1 对零初始条件线性时变系统,t 0时刻BIBO 稳定的充分必要条件是 01212(,),,,,;,,,tij t h t d i q j pττβ≤<∞==∫L L证明:先证SISO 情形。
充分性,已知脉冲响应函数绝对可积,证明系统BIBO 稳定。
由基于脉冲响应的输出关系式,有ττβττττττd u d u t h d u t h t y tt tt tt ∫∫∫≤⋅≤=000)()(),()(),()(因此,对任意有界输入u (t ) ∞<≤1β)(t u ∞<≤≤⇒∫10ββττβd u t y tt )()(即系统BIBO 稳定。
再证必要性,已知系统BIBO 稳定,反设有t 1,使得 ∞=∫ττd t h t t 11),(构造有界输入 ⎪⎩⎪⎨⎧<−=>+==0100011111),(,),(,),(,),(sgn )(ττττt h t h t h t h t u∞===⇒∫∫τττττd t h d u t h t y tt t t 1010111),()(),()(这与系统BIBO 稳定矛盾,必要性得证。
MIMO 情形:对输出的每一分量,有 pj q i dt t h ij ,,,;,,,,)(L L 21210==∞<≤∫∞β定理5.2 对零初始条件线性时不变系统,BIBO 稳定的充分必要条件是,传递函数矩阵G (s )所有极点均具负实部。
稳定性理论5.1 外部稳定性和内部稳定性运动稳定性分为基于I/O 描述的外部稳定性和基于状态空间描述的内部稳定性。
内容包括外部稳定性内部稳定性内部稳定性和外部稳定性关系(1)外部稳定性考虑以I/O 描述的线性因果系统,假定初始条件为零(保证系统输入输出描述的唯一性),外部稳定性定义如下:(t时刻输出仅取决于t时刻及之前的输入) 定义5.1 称一个因果系统为外部稳定,如果对任意有界输入u (t ),对应输出y (t )均有界,即102(),[,]()u t t t y t ββ∀≤<∞∈∞⇒≤<∞外部稳定也称为BIBO 稳定。
(有界输入-有界输出)β为有界常数。
1范数:向量各元素绝对值之和;2范数:向量各元素平方之和的1/2次方。
性质1: 非负性;齐次性;三角不等式。
定理5.1 对零初始条件线性时变系统,t 0时刻BIBO 稳定的充分必要条件是(设H(t,τ)为系统脉冲响应矩阵,hij(t,τ)一个元) 01212(,),,,,;,,,tij t h t d i q j pττβ≤<∞==∫L L 证明:先证SISO 情形。
充分性,已知脉冲响应函数绝对可积,证明系统BIBO 稳定。
由基于脉冲响应的输出关系式,有 ττβττττττd u d u t h d u t h t y tt t t t t ∫∫∫≤⋅≤=000)()(),()(),()(因此,对任意有界输入u (t )∞<≤1β)(t u∞<≤≤⇒∫10ββττβd u t y tt )()( 即系统BIBO 稳定。
再证必要性,已知系统BIBO 稳定,反设有t 1,使得∞=∫ττd t h t t 101),(构造有界输入(分段函数)⎪⎩⎪⎨⎧<−=>+==010*******),(,),(,),(,),(sgn )(ττττt h t h t h t h t u∞===⇒∫∫τττττd t h d u t h t y tt t t 1010111),()(),()(这与系统BIBO 稳定矛盾,必要性得证。
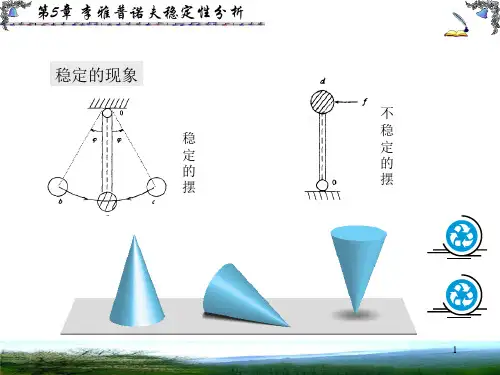
第五章稳定性分析第五章:控制系统的稳定性分析3.3.5 控制系统的稳定性分析稳定性的概念线性系统稳定的充要条件线性系统稳定的必要条件代数判据(⼀般情况,特殊情况,劳斯,赫尔维茨)劳斯判据的应⽤(确定稳定域判断稳定性,求系统的极点,设计系统中的参数3.3.5.1 稳定性的概念分析⼩球平衡点的稳定性定义:若线性控制系统在初始扰动的影响下,其过渡过程随着时间的推移逐渐衰减并趋向于零,则称该系统为渐近稳定,简称稳定。
反之,若在初始扰动的影响下,系统的过渡过程随时间的推移⽽发散,则称该系统不稳定。
3.3.5.2线性系统稳定性的充要条件设系统的微分⽅程模型为:分析系统的稳定性是分析在扰动的作⽤下,当扰动消失后系统是否能回到原来的平衡状态的性能,亦系统在作⽤下的性能,亦与系统的输⼊信号⽆关,只与系统的内部结构有关。
对上述微分⽅程描述的系统亦只与等式的左端有关,⽽与右端⽆关,亦:系统的稳定性是由下列齐次⽅程所决定:其稳定性可转化为上述齐次⽅程的解c(t)若则系统稳定,则系统不稳定。
分析齐次⽅程的解的特征。
由微分⽅程解的知识,上述⽅程对应的特征多项式为:设该⽅程有k个实根(i=1,2,…k)r对复根(i=1,2,…r)k+2r=n 且各根互异(具有相同的根时分析⽅法相同,推导稍繁琐)则上述齐次⽅程的⼀般解为:其中为常数,由式中的决定,分析可见:只有当时,否则。
注:只能是⼩于零,等于或⼤于均不⾏。
等于零的情况为临界稳定,属不稳定。
综:线性系统稳定的充要条件(iff)是:其特征⽅程式的所有根均为负实数或具有负的实部。
亦:特征⽅程的根均在根平⾯(复平⾯、s平⾯)的左半部。
亦:系统的极点位于根平⾯(复平⾯、s平⾯)的左半部。
从上⾯的充要条件可以看出:系统稳定性的判断只需计算上系统的极点,看其在s平⾯上的位置,勿需去计算齐次⽅程的解(当系统复杂时的计算可能很繁),勿需去计算系统的脉冲响应。
3.3.5.3 线性系统稳定的必要条件设系统特征⽅程式中所有系数均为实数,并设(若,对特征⽅程两端乘(-1)),可以证明上述特征⽅程中所有系数均⼤于零(即)是该特征⽅程所有根在s平⾯的左半平⾯的必要条件。