李雅普诺夫稳定性理论
- 格式:pptx
- 大小:1.42 MB
- 文档页数:15
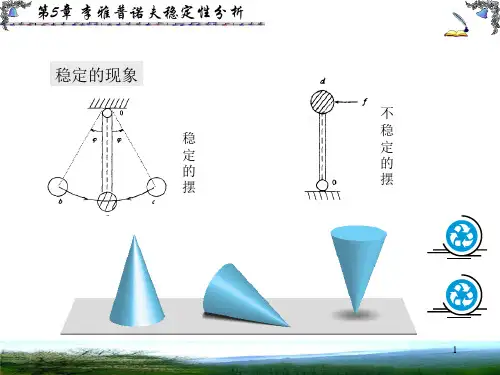
04第四章李雅普诺夫稳定性理论汇总李雅普诺夫稳定性理论是数学中一项重要的稳定性理论,对于研究动力系统的稳定性具有重要的指导意义。
该理论由俄罗斯数学家李雅普诺夫于19世纪末和20世纪初提出,后经实践证明,被广泛应用于不同领域的研究中。
李雅普诺夫稳定性理论的核心思想是通过构造李雅普诺夫函数来分析系统的稳定性。
李雅普诺夫函数是一个满足一定条件的实数函数,它能够度量系统中各个状态的变化情况,并通过数学分析得出系统状态的稳定性。
在李雅普诺夫稳定性理论中,一般使用正定函数来构造李雅普诺夫函数。
对于一个动力系统,假设其状态空间为n维实数向量,系统的演化过程可以表示为一个关于状态变量的微分方程。
为了判断系统在其中一状态的稳定性,需要构造一个函数V(x),其中x表示状态变量。
如果函数V(x)满足以下两个条件:1.V(x)是正定函数,即对于所有的x,都有V(x)>0,且只有在x=0时,V(x)=0成立。
2.对于系统中任意两个状态x1和x2,如果V(x2)>V(x1),则在系统演化的过程中,x2的状态比x1更不稳定。
那么,可以推导出系统在状态x=0附近的稳定性。
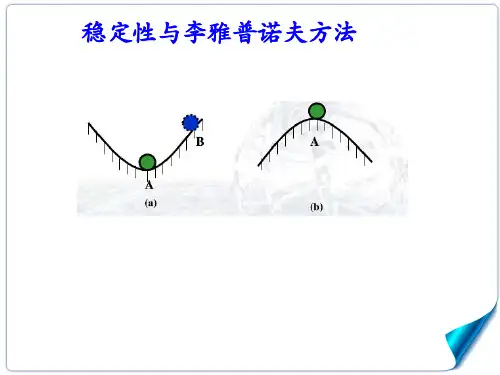
如果对于所有的状态x,有V(x)>V(x=0),那么系统就是在x=0处的稳定点。
如果只有在x=0附近,存在一个圆盘区域,使得对于所有的状态x,有V(x)>V(x=0),那么系统就是局部稳定的。
通过构造李雅普诺夫函数,可以得出系统的稳定性信息。
对于局部稳定性,可以通过计算雅普诺夫函数的导数来得到更详细的信息。
如果导数小于零,则系统是渐进稳定的;如果导数等于零,则系统是边界稳定的;如果导数大于零,则系统是不稳定的。
李雅普诺夫稳定性理论不仅适用于连续系统,也适用于离散系统。
对于离散系统,李雅普诺夫函数的构造和分析方式与连续系统类似,只是微分方程变为差分方程。
总结起来,李雅普诺夫稳定性理论是一种基于构造李雅普诺夫函数来分析系统稳定性的方法。
通过构造正定函数,可以得出系统的稳定性信息,并通过李雅普诺夫函数的导数来得到更详细的稳定性判断。