ADAMS分析实例 超值
- 格式:docx
- 大小:345.61 KB
- 文档页数:9
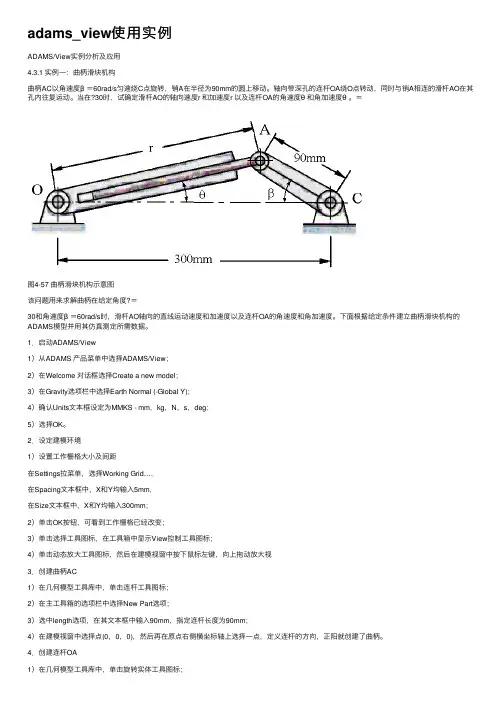
adams_view使⽤实例ADAMS/View实例分析及应⽤4.3.1 实例⼀:曲柄滑块机构曲柄AC以⾓速度β=60rad/s匀速绕C点旋转,销A在半径为90mm的圆上移动。
轴向带深孔的连杆OA绕O点转动,同时与销A相连的滑杆AO在其孔内往复运动。
当在?30时,试确定滑杆AO的轴向速度r 和加速度r 以及连杆OA的⾓速度θ和⾓加速度θ。
=图4-57 曲柄滑块机构⽰意图该问题⽤来求解曲柄在给定⾓度?=30和⾓速度β=60rad/s时,滑杆AO轴向的直线运动速度和加速度以及连杆OA的⾓速度和⾓加速度。
下⾯根据给定条件建⽴曲柄滑块机构的ADAMS模型并⽤其仿真测定所需数据。
1.启动ADAMS/View1)从ADAMS 产品菜单中选择ADAMS/View;2)在Welcome 对话框选择Create a new model;3)在Gravity选项栏中选择Earth Normal (-Global Y);4)确认Units⽂本框设定为MMKS - mm,kg,N,s,deg;5)选择OK。
2.设定建模环境1)设置⼯作栅格⼤⼩及间距在Settings拉菜单,选择Working Grid…,在Spacing⽂本框中,X和Y均输⼊5mm,在Size⽂本框中,X和Y均输⼊300mm;2)单击OK按钮,可看到⼯作栅格已经改变;3)单击选择⼯具图标,在⼯具箱中显⽰View控制⼯具图标;4)单击动态放⼤⼯具图标,然后在建模视窗中按下⿏标左键,向上拖动放⼤视3.创建曲柄AC1)在⼏何模型⼯具库中,单击连杆⼯具图标;2)在主⼯具箱的选项栏中选择New Part选项;3)选中length选项,在其⽂本框中输⼊90mm,指定连杆长度为90mm;4)在建模视窗中选择点(0,0,0),然后再在原点右侧横坐标轴上选择⼀点,定义连杆的⽅向,正阳就创建了曲柄。
4.创建连杆OA1)在⼏何模型⼯具库中,单击旋转实体⼯具图标;2)在主⼯具箱的选项栏中选择New Part选项;3)在建模视窗中选择点(0,0,0)和(-210mm,0,0)定义创建柱体的轴线;4)在建模视窗中选择下列点(0,5,0),(0,10,0),(-210,10,0),(-210,5,0),(0,5,0)创建连杆OA截⾯轮廓;注意:如果ADAMS/View⾃动捕捉特殊点,按Ctrl键可以选择任意位置。
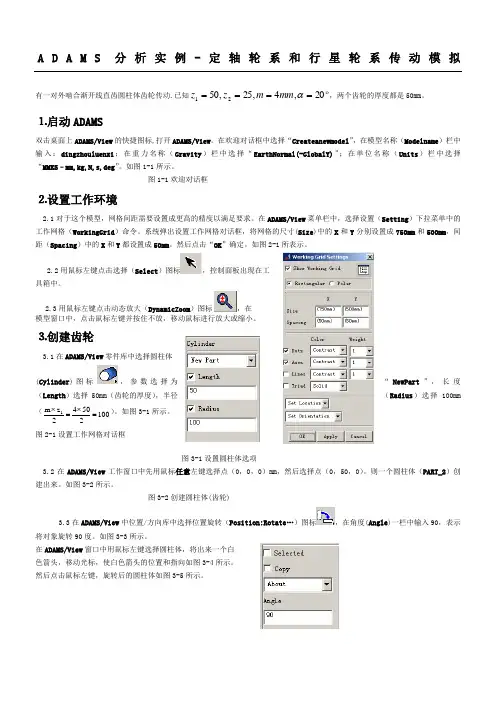
ADAMS 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知 20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
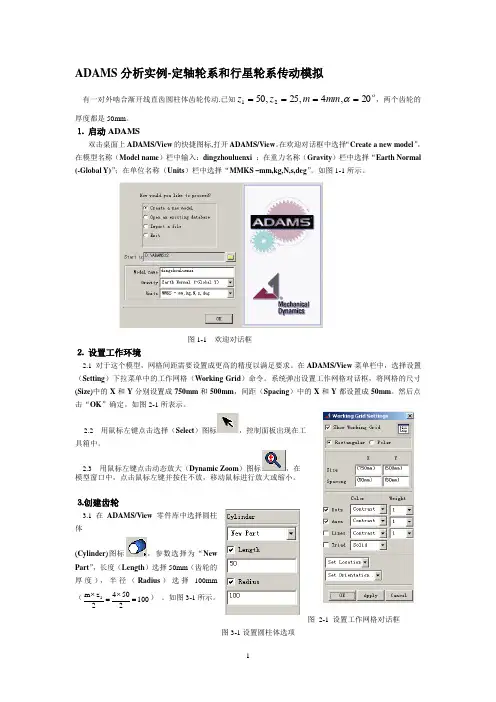
⒈ 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮3.1 在ADAMS/View 零件库中选择圆柱体(Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (10025042z m 1=⨯=⨯) 。
如图3-1所示。
图 2-1 设置工作网格对话框图3-1设置圆柱体选项3.2 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
基于ADAMS的机械四连杆机构运动仿真分析1.引言机械四连杆机构是一种常见的机械结构,它由四个连杆组成,通过转动连接在一起,能够实现复杂的运动。
对于这种机构的运动行为进行仿真分析,可以帮助工程师们更好地理解其工作原理和性能特点,为设计优化和控制提供可靠的理论基础。
本文将介绍基于ADAMS的机械四连杆机构运动仿真分析的方法和结果,以期为相关领域的研究和应用提供参考。
2.问题描述机械四连杆机构的运动仿真分析主要涉及以下几个问题:首先是机构的运动学特性,包括连杆的运动轨迹、角度、速度和加速度等;其次是机构的力学特性,包括连杆的受力情况、驱动力和阻力等;最后是机构的动力学特性,包括连杆的动力学模型、运动过程中的能量转换和损耗等。
通过分析这些问题,可以全面了解机械四连杆机构的运动规律和工作性能,为相关工程设计和控制优化提供重要参考。
3.基于ADAMS的机械四连杆机构运动仿真分析方法ADAMS(Adams Dynamics)是一款专业的多体动力学仿真软件,可以对多体机械系统的运动行为进行模拟和分析。
基于ADAMS的机械四连杆机构运动仿真分析主要包括以下几个步骤:建立模型、设定运动和约束条件、进行仿真计算、分析结果并优化设计。
3.1 建立模型首先需要在ADAMS软件中建立机械四连杆机构的三维模型,包括连杆、连接点、驱动装置等。
通过软件提供的建模工具,可以简单快速地绘制出机构的几何结构,并添加材料、质量、惯性等物理属性,为后续的仿真计算做好准备。
3.2 设定运动和约束条件在建立好模型后,需要设定机械四连杆机构的运动和约束条件。
通过ADAMS软件提供的运动学分析工具,可以简单地定义连杆的转动角度、线速度和角速度等运动参数,同时添加约束条件,限制机构的运动范围和姿态,以保证仿真计算的准确性和可靠性。
3.3 进行仿真计算设定好运动和约束条件后,即可进行仿真计算。
ADAMS软件提供了理想化模拟和实验数据验证两种仿真方式,可以根据需求选择合适的方法进行计算。
ADAMS实例——曲柄压力机运动分析其实这个曲柄压力机挺简单的。
就四个构件。
一个机座,是固定在地上的。
一个动力源,一个传递构件和一个冲头。
如下图所示:动力源上带动一个曲柄,转动通过传力构件带动冲头上下平动。
以下是曲柄压力机运动示意图。
看起来冲头的行程挺小的,这个正常的。
一般的压力机都是这样的,因为要求力大,所以设备庞大,但实际行程小。
这种压力机一般用于冲压生产。
-------------------------------------------------------------------------------------------------------------------------------1.打开Adams/View,建立一个新模型,取个名字。
比如我的模型名称为PressMachine 今天这个仿真,我们使用在别的cad软件中的造型,因此需要导入模型。
从file菜单中选择Import...,显示导入对话框。
首先从File Type(文件类型)下来列表中选择Parasolid(*.xmt_txt,*.xmt_bin)然后在file to read 的编辑框中填入导入文件的绝对路径,比如h:\work\adamswork\pm_model.xmt_txt不过,真的这样,那多麻烦啊,Adams怎么不提高一个Browse...按钮啊!其实不是的,在Adams中,有编辑框的地方,只要是设计到引用的地方,可以两种方法,简单的是双击编辑框,其次是在编辑框内右键单击,对了,看见Browse了吗?呵呵,不会有抱怨了吧。
如此方法,指引到导入的parasolid文件。
至于file type,就看你的文件格式了。
如果parasolid文件是xmt_txt,那就选择ascii,意思是文本格式。
如果是xmt_bin,就选择binary,意思是二进制文件。
至于下面关于model name和part name,就是模型名和零件名。
李增刚Adams(ADAMS)是一种基于有限元分析(FEA)技术的仿真软件,广泛应用于机械、航空航天、汽车等领域。
它能够模拟和分析各种工程问题,帮助工程师们进行产品设计和优化,提高产品的性能和可靠性。
在本文中,我们将深入探讨李增刚Adams的入门知识,并结合实例进行详细解释。
1. 什么是李增刚Adams?李增刚Adams是由美国MSC Software公司开发的一种多体动力学仿真软件。
它基于有限元分析(FEA)技术,能够对复杂的机械系统进行动力学仿真和分析。
Adams可以模拟多体系统的运动行为、受力情况,预测系统的动态特性,并通过优化来改善产品设计。
Adams在工程设计和产品优化领域具有重要的应用意义。
2. 初识Adams界面和基本操作当我们第一次打开Adams软件时,会看到一个复杂而丰富的界面。
界面上有各种工具栏、菜单和面板,初学者可能会感到有些不知所措。
不过,只要通过一些基本操作和功能的了解,就能够逐渐熟悉Adams 的界面和操作方法了。
我们需要了解Adams界面的各个部分,比如模型树、属性管理器、操作工具栏等。
学习如何创建一个简单的多体系统模型,并对其进行基本的运动学仿真。
通过这些基本操作,我们可以逐步掌握Adams的使用方法,并为后续的深入学习打下基础。
3. 多体动力学仿真实例解析为了更好地理解Adams的应用,我们将结合一个实际的多体动力学仿真实例进行解析。
假设我们要对一个汽车悬挂系统进行动力学仿真分析,我们可以首先建立一个简化的汽车悬挂系统模型,包括车身、车轮、减震器等部件。
我们可以对车辆通过不同道路情况下的行驶进行仿真,分析汽车悬挂系统在不同路面条件下的工作状态和受力情况,从而优化悬挂系统的设计。
在这个实例中,我们可以运用Adams的各种功能和工具,比如约束条件的设定、运动学分析、动力学分析等,来模拟汽车悬挂系统的运动行为和受力情况。
通过对仿真结果的分析和优化,我们可以为汽车悬挂系统的设计提供有力的支持和指导。
Adams 2020 是一款广泛应用于工程领域的多体动力学仿真软件,它可以用来模拟各种机械系统的运动行为,并进行动力学分析和优化设计。
本教程将带领读者深入了解 Adams 2020 软件的基本操作和应用技巧,并通过实例演示,让读者能够更好地掌握该软件的使用方法。
本教程将分为以下几个部分进行详细介绍:一、 Adams 2020 简介Adams 2020 是由美国Mechanical Dynamics公司开发的一款专业多体动力学仿真软件,目前已经成为全球范围内的工程师和研究人员首选的仿真工具之一。
Adams 2020 软件拥有强大的模型建立和仿真分析功能,可以对机械系统的运动行为进行准确的模拟,并提供丰富的分析结果,为工程设计和优化提供有力的支持。
二、 Adams 2020 的基本操作1. 软件安装和环境配置在开始学习 Adams 2020 软件之前,首先需要进行软件的安装和环境配置。
本教程将详细介绍 Adams 2020 软件的安装步骤和环境配置方法,确保读者能够顺利地运行该软件,并进行后续的操作和学习。
2. 模型建立与约束设置在 Adams 2020 软件中,模型建立和约束设置是仿真分析的基础。
本教程将演示如何在 Adams 2020 中建立机械系统的模型,并设置各种约束条件,包括刚性约束、连接约束等,以确保模型的合理性和准确性。
3. 运动学分析与动力学分析Adams 2020 软件可以进行运动学分析和动力学分析,以研究机械系统的运动特性和受力情况。
本教程将介绍如何在 Adams 2020 中进行运动学分析和动力学分析,并解释分析结果的含义和应用。
三、 Adams 2020 的应用技巧1. 模型优化与性能评估Adams 2020 软件可以用于模型优化和性能评估,以改进机械系统的设计和性能。
本教程将介绍如何利用 Adams 2020 进行模型优化和性能评估,包括参数优化、结构优化等方法。
2. 系统耦合与多体联动仿真在工程实际应用中,往往需要进行系统耦合和多体联动仿真分析。
ADAMSVIEW参数化和优化设计实例详解参数化和优化设计是软件工程中的两个重要概念,它们可以帮助开发人员提高代码的可读性、可维护性和性能。
本文将详细介绍参数化和优化设计的概念,并通过一个实例加以说明。
参数化是一种将特定的值提取为参数的技术。
在编程中,我们经常需要使用一些固定的值,比如常量或者特定的配置参数。
将这些值直接写入代码中,会导致代码的可读性和可维护性变差。
而通过参数化,我们可以将这些值提取为参数,使得代码更加灵活和可复用。
例如,我们在编写一个计算圆面积的函数时,可以将圆的半径作为参数传递给函数,而不是将半径的具体值直接写在函数中。
这样,我们可以在不改变函数实现的情况下,重复使用这个函数来计算不同半径的圆的面积。
除了提高代码的可读性和可维护性外,参数化还可以提高代码的灵活性。
通过将固定值作为参数,我们可以在不改变函数实现的情况下,根据不同的需求动态调整这些参数的值,从而实现不同的功能。
这种灵活性在开发过程中非常有用,特别是当我们需要处理多种不同情况时。
优化设计是指对代码进行优化以提高性能的过程。
在开发过程中,我们经常会遇到一些性能瓶颈,比如运行时间过长、内存占用过大等问题。
通过优化设计,我们可以对代码进行改进,以提高性能,让程序更加高效地运行。
优化设计的实现可以有很多方法,比如减少循环次数、使用更高效的算法、合理利用缓存等。
优化设计并不是一蹴而就的过程,它需要依赖大量的测试和实验来验证不同的改进方法的效果。
因此,在进行优化设计时,我们不应该盲目地追求性能,而是应该基于实际情况和需求,寻找合适的优化方案。
下面通过一个具体的实例来说明参数化和优化设计的应用。
假设我们要开发一个程序,用于计算一些数列的前n个数字的和。
首先,我们可以将计算和的代码抽象为一个函数,并将数列的起始值和计算的个数作为参数传递给函数。
这样,我们可以根据具体的需求,轻松地重复使用这个函数。
其次,我们可以对计算和的方法进行优化。
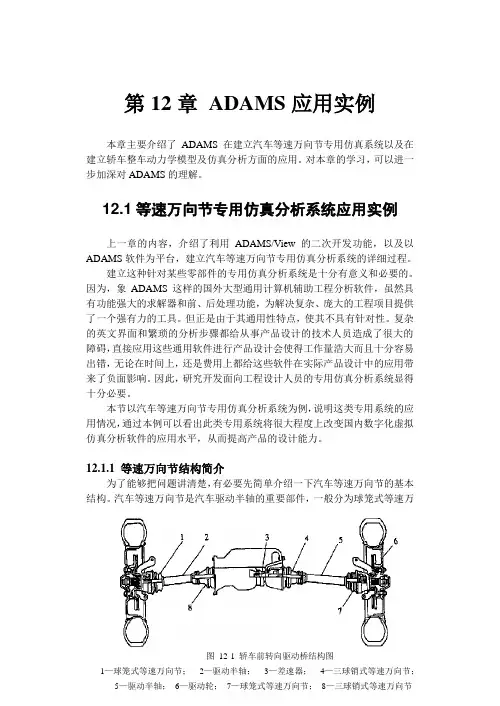
第12章ADAMS应用实例本章主要介绍了ADAMS在建立汽车等速万向节专用仿真系统以及在建立轿车整车动力学模型及仿真分析方面的应用。
对本章的学习,可以进一步加深对ADAMS的理解。
12.1等速万向节专用仿真分析系统应用实例上一章的内容,介绍了利用ADAMS/View的二次开发功能,以及以ADAMS软件为平台,建立汽车等速万向节专用仿真分析系统的详细过程。
建立这种针对某些零部件的专用仿真分析系统是十分有意义和必要的。
因为,象ADAMS这样的国外大型通用计算机辅助工程分析软件,虽然具有功能强大的求解器和前、后处理功能,为解决复杂、庞大的工程项目提供了一个强有力的工具。
但正是由于其通用性特点,使其不具有针对性。
复杂的英文界面和繁琐的分析步骤都给从事产品设计的技术人员造成了很大的障碍,直接应用这些通用软件进行产品设计会使得工作量浩大而且十分容易出错,无论在时间上,还是费用上都给这些软件在实际产品设计中的应用带来了负面影响。
因此,研究开发面向工程设计人员的专用仿真分析系统显得十分必要。
本节以汽车等速万向节专用仿真分析系统为例,说明这类专用系统的应用情况,通过本例可以看出此类专用系统将很大程度上改变国内数字化虚拟仿真分析软件的应用水平,从而提高产品的设计能力。
12.1.1 等速万向节结构简介为了能够把问题讲清楚,有必要先简单介绍一下汽车等速万向节的基本结构。
汽车等速万向节是汽车驱动半轴的重要部件,一般分为球笼式等速万图12-1 轿车前转向驱动桥结构图1—球笼式等速万向节;2—驱动半轴;3—差速器;4—三球销式等速万向节;5—驱动半轴;6—驱动轮;7—球笼式等速万向节;8—三球销式等速万向节机械系统动力学分析及ADAMS应用向节和三球销式等速万向节两种,分别安装在驱动半轴的两端,如图12-1所示:图12-2 球笼式等速万向节的结构图1-钟形壳;2-钢球(6个);3-保持架(球笼);4-星形套球笼式等速万向节由钟形壳、钢球、保持架和星形套组成。
A D A M S 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知ο20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Createanewmodel ”,在模型名称(Modelname )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“EarthNormal(-GlobalY)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1欢迎对话框⒉设置工作环境2.1对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(WorkingGrid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3用鼠标左键点击动态放大(DynamicZoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮3.1在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm(10025042z m 1=⨯=⨯)。
如图3-1所示。
图2-1设置工作网格对话框图3-1设置圆柱体选项3.2在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
ADAMS上机实验报告姓名:崔哲华专业:工程力学学号:1608074214一、问题描述凸轮推杆机构如图1所示。
在图示瞬时,已知凸轮半径为R , 60=ϕ,凸轮的速度和加速度分别为v 和a 。
试求图示瞬时推杆AB 的速度和加速度,并与理论值比较。
图 1.凸轮推杆机构二、ADAMS 建模分析在该问题中,凸轮作为主动件,在地面上做水平直线匀变速运动,其速度方向及加速度方向均水平向右。
在凸轮驱动下,杆件AB 在竖直方向做直线运动。
因而,建立此模型需要3个部件,即大地(part1)、凸轮(part2)、推杆AB(part3)。
3个约束,即凸轮与大地之间用移动副连接、推杆AB 与大地之间用移动副连接、凸轮与推杆AB 之间是点线约束。
以下建模中,用半圆弧代替凸轮,用矩形代替推杆。
三、ADAMS 建模步骤1、设置工作栅格Menu>Settings>Working Gird:首先设置工作平面大小(SIZE)为2000mm×2000mm,其次设置栅格间距(Spacing)为25mm,其余设置不变,点击OK,如图2所示。
图 2.设置工作栅格2、创建半圆弧1Bodies>Construction>Geometry:Arc>New Part:在Radius前的方框中打对勾,在后面的方框中输入40.0cm。
Start Angle(起始角度)输入0.0d,End Angle(终止角度)为180.0d,圆弧不闭合,如图3所示。
图 3.半圆弧1参数设置Menu>View>Coordinate Window:打开坐标窗口,在原点附近点击右键,弹出坐标窗口1,输入坐标(0.0,0.0,0.0),点击Apply,再点击右键,弹出坐标窗口2,输入坐标(400.0,0.0,0.0)点击Apply。
得到半圆弧1,如图6所示。
图 4.坐标窗口1图 5.坐标窗口2图 6.半圆弧13、创建矩形Bodies>Construction>Geometry:Polyline>New Part:创建多段线,不闭合。
Full vehicle analyses:The following tutorial will help you complete a full vehicle analysis using Adams/CAR. First, open Adams/CAR and change the working directory by clicking File/Select Directory from the main toolbar. Set the working directory to a folder on the C drive just as you did in the suspension analysis tutorial.Next, open a full vehicle model. For this tutorial, we will be using the MDI_demo_vehicle. Click File/Open/Assembly. The Open Assembly dialog box will appear. Double click in the text entry area of the dialog box to open the select file navigation window. Select theMDI_Demo_Vehicle and click “Open” in the select file window and click “OK” in the Open Assembly window.The message window will appear and the assembly will open. Once the assembly is fully loaded, close the message window and the open assembly dialog box. Your screen should show the demo vehicle like the following screen shot.Now that we have a full vehicle model opened, we can perform a full vehicle analysis on it. There are many different types of full vehicle analyses we can perform on our model. We can simulate straight line acceleration and braking, constant radius cornering, lane changes, and drifting. This exercise will simulate constant radius cornering at the vehicle’s lateral acceleration limits. Consult the help files for a description of the full vehicle analyses Adams/CAR has to offer. They are accessible by clicking Help/MSC.Adams help form the main toolbar.This simulation can be very useful in comparing two different suspension setups. This simulation can be completed for both suspension designs. The maximum lateral accelerations can be compared, along with other parameters calculated by Adams/CAR. The comparison can help determine which design outperforms the other in a constant radius cornering test. The simulation will not be useful in predicting the maximum lateral acceleration of your vehicle model unless all of the vehicle’s systems are modeled accurately. This is why a comparative analysis will be more useful than an absolute analysis. This same procedure can be completed for all other full vehicle analyses to determine the strengths and weaknesses of each design relative to one another. Braking, jumping, and acceleration simulations can help to estimate forces in components such as control arms and spherical joints so these parts can be designed to withstand the forces they are likely to see.First, we will complete a constant radius cornering analysis. To do this, clickSimulate/Full Vehicle Analysis/Cornering Events/Constant Radius Cornering from the main toolbar. See the image below.This will open the Constant Radius Cornering dialog box. Enter the parameters according to the picture below. This will simulate the car driving around a circular track with a radius of 100 feet. The car will begin its travel at 20 mph and end at 50 mph. The car is not limited to travelling only on the track. If the car cannot handle the lateral acceleration of the maneuver, it may spinout of control or just overshoot the turns.After you have entered all of the above parameters, click “Apply”The message window will appear and the simulation will begin. Once the simulation completes, close the message window and the constant radius cornering dialog box. Zoom out on the screen until you can see the entire track. Click review/Animation Controls on the main toolbar. Thiswill allow you to play an animation of the simulation. Play the simulation to see how the vehicle traverses the 100 foot radius track.The car overshoots the track and pushes off of the outside edge of the circular track. This is an oversteer maneuver. This will be a good evaluative simulation to compare different suspension setups.Now, we will open the postprocessing window and plot lateral acceleration versus time. This will give us an idea of the road holding capabilities for this vehicle.Click “Review/Postprocessing window” from the main toolbar. The postprocessing window willopen. It should look like the following screenshot:Now, in the postprocessing window, highlight the following:Simulation – demo_CRC_test_crcFilter – User DefinedRequest – Chassis AccelerationsComponent – LateralNow click the “Add Curves” button. You should get a plot like the following:This indicates that the peak lateral acceleration of our vehicle was about 0.95 G’s before it pushed off of the track.For an evaluation of designs, you could change the suspension setup of this vehicle, re-run this simulation, and then compare this lateral acceleration plot to see if you improved the road holding ability of your vehicle.Now, add your name and the date to this plot by clicking the “A” button on the top toolbar (see green arrow above) and make a print of the plot.。
ADAMS 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知ο20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈ 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框⒉ 设置工作环境对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius)选择100mm(10025042z m 1=⨯=⨯) 。
如图3-1所示。
图 2-1 设置工作网格对话框图3-1设置圆柱体选项在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
则一个圆柱体(PART_2)创建出来。
如图3-2所示。
图3-2 创建圆柱体(齿轮)在ADAMS/View 中位置/方向库中选择位置旋转(Position: Rotate …)图标,在角度(Angle )一栏中输入90,表示将对象旋转90度。
如图3-3所示。
在ADAMS/View 窗口中用鼠标左键选择圆柱体,将出来一个白 色箭头,移动光标,使白色箭头的位置和指向如图3-4所示。
然后点击鼠标左键,旋转后的圆柱体如图3-5所示。
图 3-3 位置旋转选项图 3-4 圆柱体的位置旋转图3-5 旋转90后的圆柱体图3-6设置圆柱体选项在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径 (Radius)选择50mm(5022542z m 2=⨯=⨯),如图3-6所示。
在ADAMS/View 工作窗口中先用 鼠标左键选择点(150,0,0)mm ,然后选择 点(150,50,0)。
则一个圆柱体(PART_3)创建出来。
如图3-7所示。
3-7 创建圆柱体(齿轮) 在ADAMS/View 中位置/方向库中选择位置旋转(Position: Rotate …) 图标,在角度(Angle )一栏中输入90,表示将对象旋转90度。
如图3-3所示。
在ADAMS/View 窗口中用鼠标左键选择圆柱体,将出来一个白色箭头 ,移动光标,使白色箭头的位置和指向如图3-8所示 。
然后点击鼠标左键,旋转后的圆柱体如图3-9所示。
图 3-8 圆柱体的位置旋转图 3-9 旋转90后的圆柱体⒋ 创建旋转副、齿轮副、旋转驱动选择ADAMS/View 约束库中的旋转副(Joint: Revolute ) 图标,参数选择2 Bod-1 Loc 和Normal To Grid 。
在ADAMS/View 工作窗口中先用鼠标左键选择齿轮(PART_2), 然后选择机架(ground ),接着选择齿轮上的,如图4-1所示。
图中显亮的部分就是所创建的旋转副(JOINT_1)该旋转副连接机架和齿轮,使齿轮能相对机架旋转。
图4-1 齿轮上的旋转副4再次选择ADAMS/View 约束库中的旋转副(Joint: Revolute )图标,参数选择2 Bod-1 Loc 和Normal To Grid 。
在ADAMS/View 工作窗口中先用鼠标左键选择齿轮(PART_3),然后选择机架(ground),接着选择齿轮上的,如图4-2所示。
图中显亮的部分就是所创建的旋转副(JOINT_2)该旋转副连接机架和齿轮,使齿轮能相对机架旋转。
图 4-2 蜗杆上的旋转副创建完两个定轴齿轮上的旋转副后,还要创建两个定轴齿轮的啮合点(MARKER)。
齿轮副的啮合点和旋转副必须有相同的参考连杆(机架),并且啮合点Z轴的方向与齿轮的传动方向相同。
所以在本题中,啮合点(MARKER)必须定义在机架(ground)上,机架可以看作机架。
选择ADAMS/View工具箱的动态选择(Dynamic Pick)图标,将两个齿轮的啮合处进行放大,再选择动态旋转图标,进行适当的旋转。
选择ADAMS/View零件库中的标记点工具图标,参数选择如图4-3所示。
选择坐标为(100,50,0),如图4-4所示,图中显亮的部分就是所创建的啮合点(MARKER_14)。
图 4-3 标记点的选项4-4 蜗轮蜗杆的啮合点下面将对上面做出的啮合点进行位置移动和方位旋转,使该啮合点位于两齿轮中心线上,并使啮合点的Z轴方向与齿轮旋转方向相同。
在ADAMS/View窗口中,在两个齿轮啮合处点击鼠标右键,选择--Maker: MARKER_14→Modify,如图4-5所示。
在弹出的对话框中,将Location栏的值, , 改为, 25, (位置移动),将Orientation栏中的值, , 修改为0, 90, 0(方位旋转)。
如图4-6所示。
点击对话框下面的OK键进行确定,旋转后的啮合点(MARKER_14)如图4-7所示。
从图中可以看出,啮合点的Z轴(蓝色)Z轴的方向与齿轮的啮合方向相同。
图4-5 属性修改对话框图4-7 旋转后的啮合点图 4-6 进行坐标轴的旋转选择ADAMS/View约束库中的齿轮副(Gear)图标,在弹出的对话框中的Joint Name栏中,点击鼠标右键分别选择JOINT_1、JOINT_2。
如图4-7所示。
在Common Velocity Marker栏中,点击鼠标右键选择啮合点(MARKER_14)。
如图4-8所示,然后点击对话框下面的OK按钮,两个齿轮的齿轮副创建出来,如图4-9所示4-7 齿轮副的创建对话框图 4-8 齿轮副的创建要素 图4-9 定轴齿轮的齿轮副在ADAMS/View 驱动库中选择旋转驱动(Rotational Joint Motion )按钮,在Speed 一栏中输入360,360表示旋转驱动每秒钟旋转360度。
在ADAMS/View 工作窗口中,两个齿轮中任选一个作为主动齿轮,本设计中选择左边的齿轮(红色的),用鼠标左键点击齿轮上的旋转副(JOINT_1),一个旋转驱动创建出来,如图4-10所示,图中显亮的部分为旋转驱动。
图4-10 齿轮上的旋转驱动5仿真模型点击仿真按钮,设置仿真终止时间(End Time )为1,仿真工作步长(Step Size )为,然后点击开始仿真按钮,进行仿真。
对小齿轮的进行运动分析。
因为大齿轮的齿数为501=z ,小齿轮的齿数252=z ,模数mm m 4=,因此根据机械原理可以知道, 对于标准外啮合渐开线直齿圆柱体齿轮传动,小齿轮的转速为大齿轮的2倍。
对小齿轮的旋转副JOINT_2进行角位置分析。
在ADAMS/View 工作窗口中用鼠标右键点击小齿轮的旋转副JOINT_2,选择Modify 命令,如图5-1所示,在弹出的修改对话框中选择测量(Measures )图标,如图5-2所示。
在弹出的测量对话框中,将Characteristic 栏设置为Ax/Ay/Az Projected Rotation ,将Component 栏设置为Z ,将From/At 栏设置为(或者),其他的设置如图5-3所示。
然后点击对话框下面的“OK ”确认。
生成的时间-角度曲线如图5-4所示。
图5-1旋转副属性修改命令图5-3测量力对话框的设置图5-2修改对话框 图 5-4 时间和角度的曲线图由图5-4可以知道,当大齿轮每秒逆时针转过360度时,小齿轮顺时针转过的角度为720度,符合标准外啮合渐开线直齿圆柱体齿轮传动角速度与齿轮的分度圆半径成反比。
ADAMS 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知ο20,4,25,5021====αmm m z z 。
两个齿轮的厚度都是50mm 。
⒈ 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:xingxingchiluen ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框⒉ 设置工作环境对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮 图 2-1 设置工作网格对话框在ADAMS/View 零件库中选择圆柱 体(Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮 的厚度),半径(Radius )选择100mm (10025042z m 1=⨯=⨯)。
如图3-1所示。
图3-1设置圆柱体选项在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
则一个圆柱体(PART_2)创建出来。
如图3-2所示。
3-2 创建圆柱体(齿轮)图标,在ADAMS/View 中位置/方向库中选择位置旋转(Position: Rotate …)在角度(Angle )一栏中输入90,表示将对象旋转90度。