冲激函数匹配法确定初始条件.
- 格式:doc
- 大小:62.00 KB
- 文档页数:2
冲激函数匹配法在信号与系统教学中的应用研究
冲激函数匹配法是一种重要的信号分析和系统建模方法,在信
号与系统教学中具有广泛的应用。
该方法的基本思想是利用冲激函
数的响应特性对信号进行分析和建模,通过与已知系统的冲激响应
匹配来确定待测系统的特性参数。
具体应用包括以下几个方面:
1. 动态系统建模
在控制工程和自动化领域,冲激函数匹配法常用来对复杂系统
进行动态建模。
通过对系统输入信号的冲激响应进行详细分析,可
以得到系统的核心特性、阶数和传递函数等信息。
2. 信号滤波
冲激函数匹配法可用于信号滤波,例如数字信号处理领域中的FIR滤波器和IIR滤波器。
可以通过对输入信号进行冲击响应分析
来确定滤波器的组成结构和参数,从而实现对信号的滤波。
3. 语音信号处理
在语音信号处理方面,冲激函数匹配法被广泛应用于语音识别、说话人识别和语音合成等领域。
该方法能够对人声信号进行字母分析,并对信号特性进行建模,从而实现高效的语音处理功能。
4. 图像处理
在图像处理领域,冲激函数匹配法常用于图像分析和建模。
可
以利用冲激响应对图像边缘特性进行分析,并利用系统识别技术来
提取关键信息,实现图像处理的目的。
总的来说,冲激函数匹配法具有广泛的应用价值,可以有效地
提高信号处理的效率和准确性,在信号与系统的教学和研究中具有
重要的应用前景。
关于LTI系统零点跳变问题的研究宋慧超;丛梦龙;孙丹丹【摘要】Under the action of deterministic input signals,the lumped parameter linear time-invariant system is called LTI system for short,which includes continuous-time system and discrete-time system.In the continuous time system analysis, the system state may change at the initial moment because of the excitation signal.We can not use the original starting storage to determine the initial value of the systemresponse,which adds difficulty to the system analysis.Two methods are proposed to solve the problem:Impulse function matching method and method of Laplace transform. The characteristics of the two methods are described by examples from time domain and frequency domain.It helps us to understand the basic concepts and analysis methods of signal and system theory.%在确定性输入信号作用下的集总参数线性时不变系统简称LTI系统,包括连续时间系统与离散时间系统.在连续时间系统分析中,由于激励信号的加入,系统状态在零时刻可能发生跳变,从而无法利用原有的起始储能确定系统响应的初值,为系统分析增加了难度.针对于此,文中提出了解决零点跳变的两种方法:冲激函数匹配法与拉普拉斯变换法.从时域、频域角度,通过实例验证讨论了两种方法各自的特点,对理解信号与系统理论的基本概念与分析方法有一定帮助.【期刊名称】《科技创新导报》【年(卷),期】2015(000)028【总页数】2页(P38-39)【关键词】时域分析;拉普拉斯变换;0-状态;0+状态【作者】宋慧超;丛梦龙;孙丹丹【作者单位】内蒙古民族大学物理与电子信息学院内蒙古通辽 028000;内蒙古民族大学物理与电子信息学院内蒙古通辽 028000;内蒙古民族大学物理与电子信息学院内蒙古通辽 028000【正文语种】中文【中图分类】TP31在信号与系统的研究中,线性时不变(LTI)系统的数学模型是常系数线性微分方程,输出响应通过求解微分方程得出。
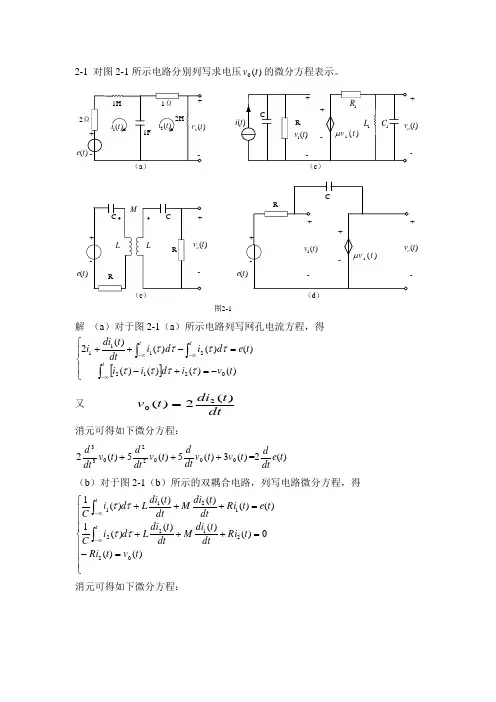
2-1 对图2-1所示电路分别列写求电压)(0t v 的微分方程表示。
2(t ei )(t +-(e )(e )(t +-图2-1解 (a )对于图2-1(a )所示电路列写网孔电流方程,得[]⎪⎩⎪⎨⎧-=+-=-++⎰⎰⎰∞-∞-∞-t t t t v i d i i t e d i d i dt t di i )()()()()()()()(202122111ττττττττ 又 dtt di t v )(2)(20= 消元可得如下微分方程:)(3)(5)(5)(200022033t v t v dt dt v dtd t v dt d +++=2)(te dt d(b )对于图2-1(b )所示的双耦合电路,列写电路微分方程,得⎪⎪⎪⎩⎪⎪⎪⎨⎧=-=+++=+++⎰⎰∞-∞-)()(0)()()()(1)()()()()(10221221211t v t Ri t Ri dt t di M dt t di L d i Ct e t Ri dtt di M dt t di L d i C ttττττ 消元可得如下微分方程:)()(1)(2)(2)(2)()(22020022203304422t e dtd MR t v C t v dt d C R t v dtd R R L t v dtd RL t v dt d M L =++⎪⎭⎫ ⎝⎛+++- (c )对于图2-1(c )所示电路列写电路方程,得⎪⎪⎩⎪⎪⎨⎧=⎥⎦⎤⎢⎣⎡+++=⎰∞-)()()(1)()()()(10101011t v t v dt d C dt t v L R t v R t v t v dt d C t i t μ 消元可得如下微分方程:)()(1)(1)()(101011022110331t i dt dR t v RL t v dt d R R L C t v dt d R C R C t v dt d CC μ=+⎪⎪⎭⎫ ⎝⎛++⎪⎪⎭⎫ ⎝⎛++ (d )对图2-1(d )所示电路列写电路方程,电流)(t i 如图2-2所示,得⎪⎪⎩⎪⎪⎨⎧==+=++⎰∞-)()()()()()()()(1)(1011t v t v t e t v t Ri t e t v d i C t Ri t μμττ 消元可得如下微分方程:(t e )(t +-图2-2)()(1)()1(00t e Rt v R t v dt d Cμμ=+-2-2 图2-3所示为理想火箭推动器模型。
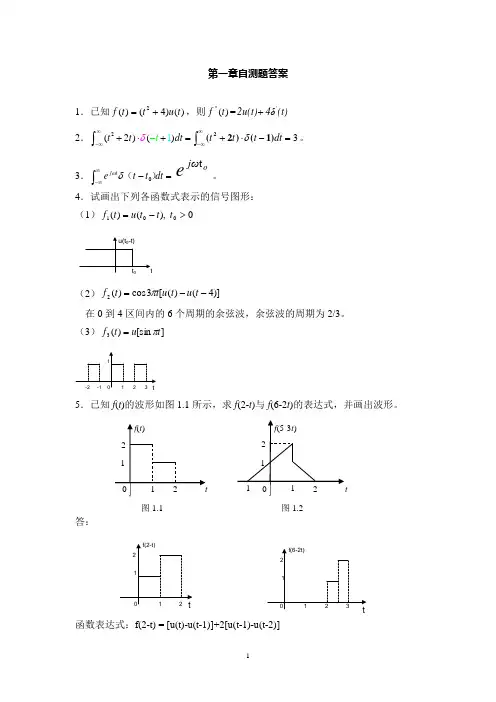
第一章自测题答案1.已知)()4()(2t u t t f +=,则)(''t f =(t)4δ2u(t)'+ 2.2(2)1()t t d t t δ∞-∞+⋅+-=⎰3=-⋅+⎰∞∞-dt t t t )1()2(2δ。
3.=-⎰∞∞-dt t t e tj )(0δωoj ωet 。
4.试画出下列各函数式表示的信号图形: (1)0 ),()(001>-=t t t u t f(2))]4()([3cos )(2--=t u t u t t f π在0到4区间内的6个周期的余弦波,余弦波的周期为2/3。
(3)][sin )(3t u t f π=5.已知f (t )的波形如图1.1所示,求f (2-t )与f (6-2t )的表达式,并画出波形。
答:函数表达式:f(2-t) = [u(t)-u(t-1)]+2[u(t-1)-u(t-2)] f(6-2t)=[u(t-2)-u(t-2.5)]+2[u(t-2.5)-u(t-3)]6.信号f (5-3t )的波形如图1.2所示,试画出f (t )的波形。
答:f(5-3t)左移5/3得到f(-3t),然后再扩展3倍得到f(-t),最后反褶可得到f(t)7.对于下述的系统,输入为e (t ), 输出为r (t ),T [e (t )]表示系统对e (t )的响应,试判定下述系统是否为: (1) 线性系统;(2)非时变系统;(3)因果系统;(4)稳定系统:(a) r (t )=T [e (t )]=e (t -2)线性、非时变、因果、稳定系统 (b) r (t )=T [e (t )]=e (-t )线性、时变、非因果、稳定系统 (c) r (t )=T [e (t )]=e (t )cos t 线性、时变、因果、稳定系统 (d) r (t )=T [e (t )]=a e (t )非线性、时不变、因果、稳定系统9. 一线性非时变系统,当输入为单位阶跃信号u (t )时,输出r (t )为 )1()()(t u t u e t r t --+=-,试求该系统对图1.3所示输入e (t )的响应。
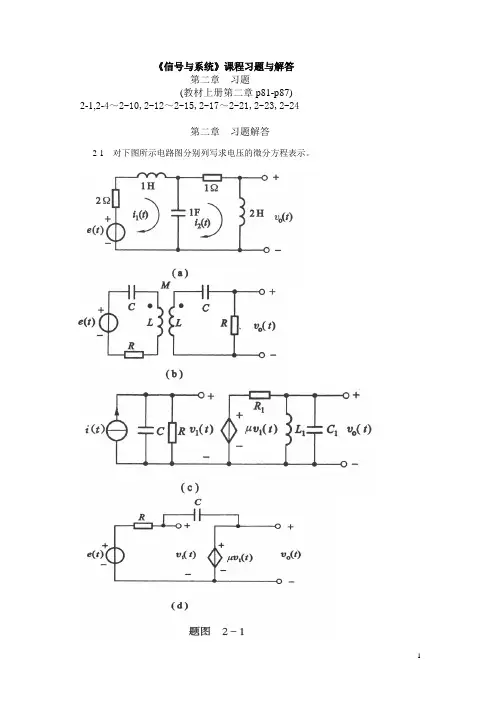
《信号与系统》课程习题与解答第二章习题(教材上册第二章p81-p87)2-1,2-4~2-10,2-12~2-15,2-17~2-21,2-23,2-24第二章习题解答2-1 对下图所示电路图分别列写求电压的微分方程表示。
图(a):微分方程:11222012()2()1()()()2()()()()2()()()c cc di t i t u t e t dtdi t i t u t dtdi t u t dt du t i t i t dt ⎧+*+=⎪⎪⎪+=⎪⇒⎨⎪=⎪⎪⎪=-⎩图(b ):微分方程:⎪⎪⎪⎩⎪⎪⎪⎨⎧-==+++=+++⎰⎰2021'2'21'2'11)(01)(1Ri t v Ri Mi Li dt i Ct e Ri Mi Li dt i C)()(1)(2)()2()(2)()(33020022203304422t e dtd MR t v C t v dt d C R t v dt d C L R t v dt d RL t v dt d M L =+++++-⇒ 图(c)微分方程:dt i C i L t v ⎰==211'101)(⎪⎪⎪⎩⎪⎪⎪⎨⎧===⇒⎰dt t v L i t v L i dtdt v L i dt d)(1)(1)(10110'1122011∵ )(122111213t i dt d L C i i i i +=+=)(0(1]1[][101011022110331t e dt dR t v RL v dt d RR L C v dt d R C R C v dt d CC μ=+++++⇒图(d)微分方程:⎪⎩⎪⎨⎧+-=++=⎰)()()()()(1)()(11111t e t Ri t v t v dt t i C t Ri t e μRC v dt d 1)1(1+-⇒μ)(11t e V = ∵)()(10t v t v μ=)()(1)1(0'0t e R v t v R Cv v =+-⇒2-4 已知系统相应的其次方程及其对应的0+状态条件,求系统的零输入响应。
《信号与系统》课程习题与解答第二章习题(教材上册第二章p81-p87)2-1,2-4~2-10,2-12~2-15,2-17~2-21,2-23,2-24第二章习题解答2-1 对下图所示电路图分别列写求电压的微分方程表示。
图(a):微分方程:11222012()2()1()()()2()()()()2()()()c cc di t i t u t e t dtdi t i t u t dtdi t u t dt du t i t i t dt ⎧+*+=⎪⎪⎪+=⎪⇒⎨⎪=⎪⎪⎪=-⎩图(b ):微分方程:⎪⎪⎪⎩⎪⎪⎪⎨⎧-==+++=+++⎰⎰2021'2'21'2'11)(01)(1Ri t v Ri Mi Li dt i Ct e Ri Mi Li dt i C)()(1)(2)()2()(2)()(33020022203304422t e dtd MR t v C t v dt d C R t v dt d C L R t v dt d RL t v dt d M L =+++++-⇒ 图(c)微分方程:dt i C i L t v ⎰==211'101)(⎪⎪⎪⎩⎪⎪⎪⎨⎧===⇒⎰dt t v L i t v L i dtdt v L i dt d)(1)(1)(10110'1122011∵ )(122111213t i dt d L C i i i i +=+=)(0(1]1[][101011022110331t e dt dR t v RL v dt d RR L C v dt d R C R C v dt d CC μ=+++++⇒图(d)微分方程:⎪⎩⎪⎨⎧+-=++=⎰)()()()()(1)()(11111t e t Ri t v t v dt t i C t Ri t e μRC v dt d 1)1(1+-⇒μ)(11t e V CR = ∵)()(10t v t v μ=)()(1)1(0'0t e R v t v R Cv v =+-⇒2-4 已知系统相应的其次方程及其对应的0+状态条件,求系统的零输入响应。
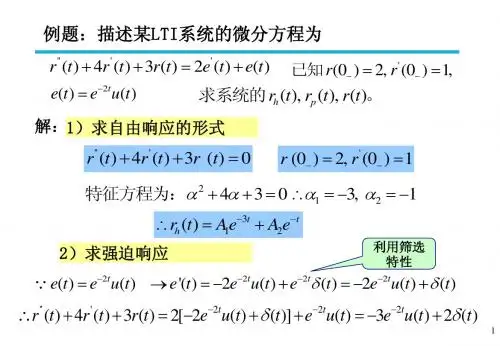
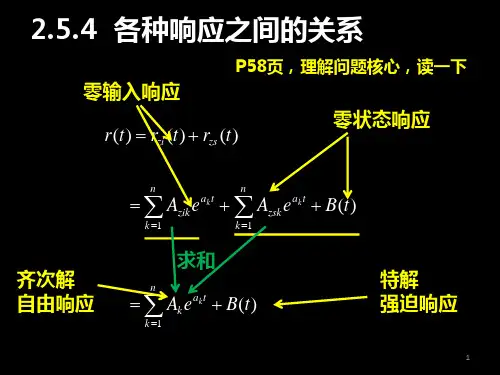
第二章 连续时间系统的时域分析经典法:双零法卷积积分法:求零状态响应求解系统响应→定初始条件满足换路定则起始点有跳变:求跳变量零输入响应:用经典法求解零状态响应:卷积积分法求解()()()()⎩⎨⎧==-+-+0000L L c c i i u u例题•例题1:连续时间系统求解(经典法,双零法) •例题2:求冲激响应(n >m ) •例题3:求冲激响应(n <m ) •例题4:求系统的零状态响应 •例题5:卷积 •例题6:系统互联例2-1分析在求解系统的完全响应时,要用到有关的三个量是: :起始状态,它决定零输入响应;()()()()()()()()()强迫响应。
状态响应,自由响应,并指出零输入响应,零,求系统的全响应,已知 系统的微分方程为描述某t u t e r r t e t t e t r t t r t t r =='=+=++--,00,206d d 22d d 3d d LTI 22()-0)(k r ⎩⎨⎧状态变量描述法输出描述法—输入建立系统的数学模型:跳变量,它决定零状态响应; :初始条件,它决定完全响应;这三个量之间的关系是 分别利用 求零状态响应和完全响应,需先确定微分方程的特解。
解:方法一:利用 先来求完全响应,再求零输入响应,零状态响应等于完全响应减去零输入响应。
方法二:用方法一求零输入响应后,利用跳变量 来求零状态响应,零状态响应加上零输入响应等于完全响应。
本题也可以用卷积积分求系统的零状态响应。
方法一1. 完全响应 该完全响应是方程 (1)方程(1)的特征方程为 特征根为 方程(1)的齐次解为因为方程(1)在t >0时,可写为 (2)显然,方程(1)的特解可设为常数D ,把D 代入方程(2)求得 所以方程(1)的解为下面由冲激函数匹配法定初始条件 由冲激函数匹配法定初始条件 据方程(1)可设代入方程(1),得匹配方程两端的 ,及其各阶导数项,得 所以,所以系统的完全响应为()+0)(k zsr ()+0)(k r ()()()+-+=-000)()()(k zs k k r r r ()()++00)()(k k zs r r ,()()代入原方程有将t u t e =()()()()()t u t t r t t r t t r 622d d 3d d 22+=++δ()()++'0,0r r ()()++''0,0zs zs r r ()()()()()t u t t r t t r t t r 622d d 3d d 22+=++δ()()的解且满足00,20='=--r r 0232=++αα2121-=-=αα,()t t e A e A t r 221--+=()()()()t u t r t t r tt r 62d d 3d d 22=++3=D ()3221++=--tt e A e A t r ()()()t u b t a t t r ∆+=δ22d d ()()t u a t t r ∆=d d ()无跳变t r ()()()()()()t u t t r t u a t u b t a 6223+=+∆+∆+δδ2=a ()t δ()()22000=+=+'='-+a r r ()()200==-+r r ()()代入把20,20=='++r r ()3221++=--t t e A e A t r 1,021-==A A 得()0 32≥+-=-t e t r t ()t r zi 再求零输入响应2.求零输入响应 (3)(3)式的特征根为 方程(3)的齐次解即系统的零输入响应为所以,系统的零输入响应为 下面求零状态响应零状态响应=完全响应—零输入响应,即 因为特解为3,所以强迫响应是3,自由响应是方法二(5)以上分析可用下面的数学过程描述 代入(5)式 根据在t =0时刻,微分方程两端的 及其各阶导数应该平衡相等,得 于是t >0时,方程为 齐次解为 ,特解为3,于是有所以,系统的零状态响应为方法一求出系统的零输入响应为()是方程响应因为激励为零,零输入t r zi ()()()02d 3d d 22=++t r dt t r t t r ()()()()()()的解.,且满足 0000 2000='='='===--+--+r r r r r r zi zi zi zi 2121-=-=αα,()t t zi e B e B t r 221--+=()()式解得,代入,由)4(0020='=++zi zi r r 2,421-==B B ()0 242≥-=--t e e t r t t zi ()0 342≥++-=--t e e t r t t zs t t e e 24--+-()是方程零状态响应t r zs ()()()()()t u t t r t t r t t r 622d d 3d d 22+=++δ()()的解且满足000='=--zs zs r r ()项由于上式等号右边有t δ()应含有冲激函数,,故t r zs "()将发生跳变,即从而t r zs '()()-+'≠'00zs zs r r ()处是连续的.在而0=t t r zs ()()()()()t u a t r t t u b t a t r tzs zs∆=+∆+=+d d ,d d 22δ()()()()()()t u t t r t u a t u b t a 6223+=+∆+∆+δδ()t δ2=a ()()()()002000===+'='-+-+zs zs zs zs r r a r r ()()()()t u t r t t r t t r 62d d 3d d 22=++ 221t t e D e D --+()3221++=--t t zi e D e D t r ()()得由初始条件0,200=='++zs zs r r 1,421=-=D D ()0) ( 342≥++-=--t e e t r t t zs ()0 242≥-=--t e e t r t t zi完全响应=零状态响应+零输入响应,即例2-2冲激响应是系统对单位冲激信号激励时的零状态响应。