《机械原理》(于靖军版)第3章习题答案
- 格式:doc
- 大小:1.30 MB
- 文档页数:3
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。

1.根据凸轮的工作轮廓线,画出理论轮廓线
2.以凸轮转动中心为圆心,找出与凸轮理论
轮廓线内切的最小圆即为基圆
3. 凸轮理论轮廓线距凸轮转动中心最近处,
为推程开始点;凸轮理论轮廓线距凸轮转动
中心连向最远处,为推程结束点
4.从推程开始至结束,凸轮转过的角度(也
就是图中推杆相对凸轮反向转过的角度)即
为推程角。
回程角同理可得。
5.推程如图。
3-6b
1.凸轮逆时针转动,所以推杆相对凸轮顺时针转
2.图中与偏置圆相切的最短线为推程的起点,最长线为
推程的终点
3.从推程开始至结束,凸轮转过的角度(也就是图中推
杆相对凸轮反向转过的角度)即为推程角。
回程角同理
可得。
4.在推程的终点,推杆相对起点(基圆上的点)升高的
距离为推程
1.两圆心连线一定过切点(接触点),所以连接OB并延长,可找到滚子在B点接触时的圆心。
O
2.画出理论轮廓线并找出推杆顶尖的位置A'和B',之后作图和分析均以理论轮廓线及推杆的“尖顶”为依据。
3.画出偏置圆,画出推杆的位置,得到转角。
4画出基圆,得到位移S B
5.画出滚子与凸轮接触处公法线(正压力方向),得到压力角。
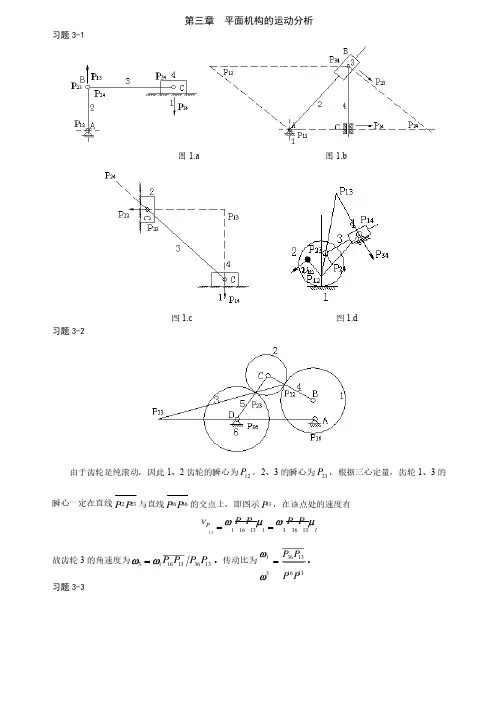
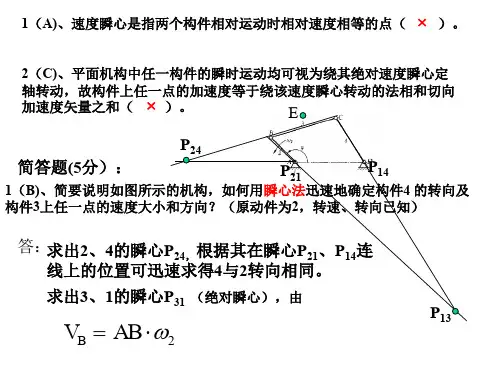
第三章平面机构的运动分析习题3-1 图1.a 图1.b 图1.c 图1.d 习题3-2 由于齿轮是纯滚动,因此1、2齿轮的瞬心为12P ,2、3的瞬心为23P ,根据三心定量,齿轮1、3的瞬心一定在直线2312P P与直线3616P P 的交点上,即图示13P ,在该点处的速度有ll P PP P P P v m w m w 133631316113==故齿轮3的角速度为1336131613P P P P w w =。
传动比为1316133631P P P P =w w 。
习题3-3答:1)三个瞬心中,14P、12P 为绝对瞬心,24P 为相对瞬心。
2)不利用其它的三个瞬心,因为它们全是相对瞬心。
3)构件2和4之间的转向关系可以根据瞬心24P 的瞬时绝对速度方向判断。
的瞬时绝对速度方向判断。
习题3-4取比例尺为mmm l 003.0=m ,作图如下,作图如下1) 由图上可知:l l P P P P P v m w m w 241442412224==,根据量得的长度,得,根据量得的长度,得s rad P P P P/455.414.72/14.32102414241224=´==w w 可计算出C 点的速度为:s m CD v l C /4.0003.030455.44=´´==m w2) 构件1、3的瞬心在点13P 处,且为绝对瞬心,因此构件3的角速度为的角速度为()s rad C P v l c /53.2)67.52003.0/(4.0133=´==mw 显然构件3上速度最小点在E 点,则其速度为点,则其速度为s m EP v l E /36.0003.04.4753.2133=´´==mw 3) 要使0=C v ,需瞬心12P 、24P 重合(如图),两位置分别为0126'=Ð=DAB j ,02227''=Ð=DAB j 。

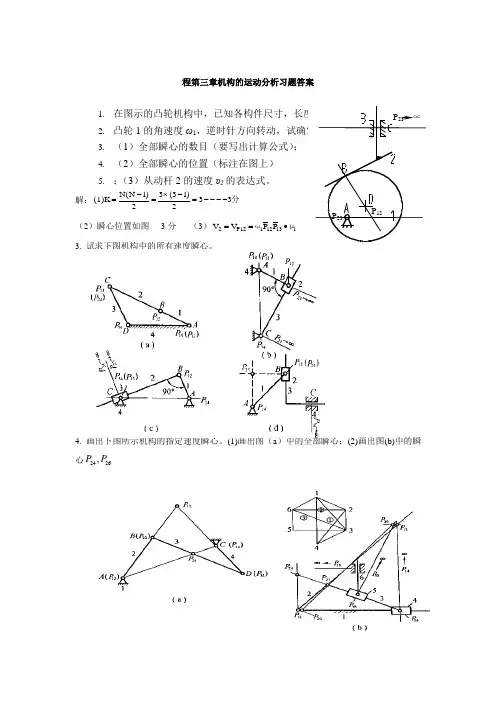
讨论题习题4-1试求岀题图4J所示的各机构的全部瞬心。
题图4・14-2在题图4・2所示的凸轮机构中,若已知凸轮2以等角速度顺时针转动,试求从动件上点解:由=①• 1叽=© •厶几勺=© •心可得:5 =解:牛3在题图4・3所示的机构中,已知曲柄1顺时针方向匀速转动,角速度^=100rad/s,试求 在图示位置导杆3的角速度◎的大小和方向。
解: 因已知曲柄2的运动,而所求构件4的运动,所以要求取构件2和4的瞬心巴-根据瞬心的性质,得 CD p ^ =^2P 24P 12=^P 24P \44-4在题图44所示的机构中,已知:图示机构的尺寸,原动件1以匀角速度◎沿逆时针方 向转动。
试确怎:(1)在图上标出机构的全部瞬心:(2)用瞬心法确左点M 的速度心,需 写出表达式,并标岀速度的方向。
题图4・3方向顺时针运题图474-5在题图4-5所示的机构中,已知:图示机构的尺寸,原动件1以匀角速度◎沿顺时针方向转动。
试确定:(1)在图上标岀机构的全部瞬心:(2)用瞬心法确左在此位置时构件3 的角速度3,需写出表达式,并标出速度的方向。
解:相应的瞬心和求解过程可以参考4—4,只需要利用V PH列出等式即可求解。
4-8在题图4-8所示是狡链四杆机构中,各杆件长度分別为/(48=28mm. /5c=70mm, /g二50mm, 加=72mm。
若取AD为机架.作图求该机构的极位夹角& ,杆CD的最大摆角亦最小传动角Tinin °题图4・8解:(1)取比例尺画出机构的极限位置及传动角的极值位置图,分别如图(a)和(b)所示。
由图上量得0 = 13°0 = 71°。
(2)由于+l AD <l BC +l CD ,故存在曲柄。
又由于43为最短杆,故机构演化为双曲柄机构,C, D都是摆转副。
另外,本题也可以利用三角形的边角关系求解具体数值。
但在讣算加in的时候,要注意:4-9已知一偏置曲柄滑块机构,如题图4-9所示。

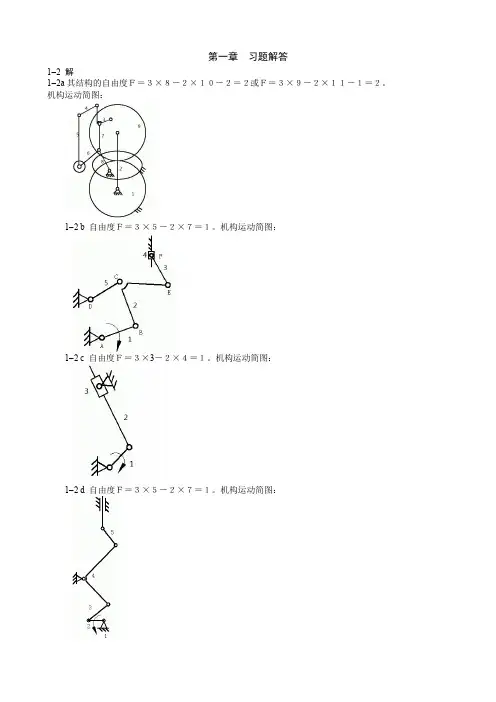
《机械原理》课后习题答案第2章(P27)2-2 计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,p l=3 F=3*3-2*3=3(b)n=3,p l=3,p h=2 F=3*3-2*3-2=1 (B处有局部自由度)(c)n=7,p l=10 F=3*7-2*10=1(d)n=4,p l=4,p h=2 F=3*4-2*4-2=2 (A处有复合铰链)(e)n=3,p l=4 F=3*3-2*4=1 (A或D处有虚约束)(f)n=3,p l=4 F=3*3-2*4=1 (构件4和转动副E、F引入虚约束)(g)n=3,p l=5 F=(3-1)*3-(2-1)*5=1 (有公共约束)(h)n=9,p l=12,p h=2 F=3*9-2*12-2=1 (M处有复合铰链,C处有局部自由度)2-3 计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,p l=7 F=3*5-2*7=1由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,p l=7 F=3*5-2*7=1此机构为Ⅱ级机构。
(c)n=5,p l=7 F=3*5-2*7=1拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4 验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,p l=4,p h=1 F=3*3-2*4-1=0 该运动链不能运动。
修改方案如下图所示:(b)n=4,p l=6 F=3*4-2*6=0 该运动链不能运动。
修改方案如下图所示:或第3章(P42)3-2 下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
(a)(b)(c)(a) v3=v P13=ω1P14P13μl3-6 在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P13来讨论轮1与轮3的传动比i13。
第5章(P80)5-2 一铰接四杆机构(2)机构的两极限位置如下图:(3)传动角最大和最小位置如下图:5-3题略解:若使其成为曲柄摇杆机构,则最短杆必为连架杆,即a 为最短杆。

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
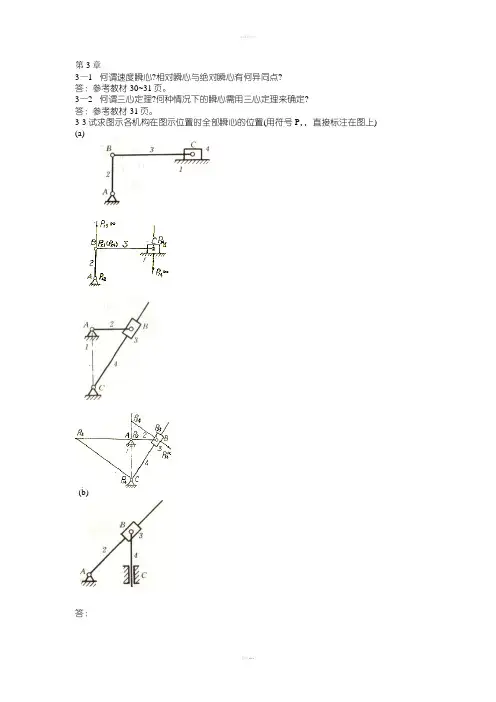
第3章3—1 何谓速度瞬心?相对瞬心与绝对瞬心有何异同点?答:参考教材30~31页。
3—2 何谓三心定理?何种情况下的瞬心需用三心定理来确定?答:参考教材31页。
3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上) (a)(b)答:答:(10分)(d)(10分)3-4标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比ω1/ω3。
答:1)瞬新的数目:K=N(N-1)/2=6(6-1)/2=152)为求ω1/ω3需求3个瞬心P 16、P 36、P 13的位置3)ω1/ω3= P 36P 13/P 16P 13=DK/AK由构件1、3在K 点的速度方向相同,可知ω3与ω1同向。
3-6在图示的四杆机构中,L AB =60mm ,L CD =90mm,L AD =L BC =120mm, ω2=10rad/s,试用瞬心法求:1)当φ=165°时,点的速度vc ;2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小;3)当V C =0时,φ角之值(有两个解)。
解:1)以选定的比例尺μ机械运动简图(图b )2)求vc 定出瞬心p12的位置(图b ) 因p 13为构件3的绝对瞬心,则有ω3=v B /lBp 13=ω2l AB /μl .Bp 13=10×0.06/0.003×78=2.56(rad/s)v c =μc p 13ω3=0.003×52×2.56=0.4(m/s)3)定出构件3的BC 线上速度最小的点E 的位置,因BC 线上速度最小的点必与p13点的距离最近,故丛p13引BC 线的垂线交于点E ,由图可得(2分)(3分)v E=μl.p13Eω3=0.003×46.5×2.56=0.357(m/s)4)定出vc=0时机构的两个位置(图c)量出φ1=26.4°φ2=226.6°3-8机构中,设已知构件的尺寸及点B的速度v B(即速度矢量pb),试作出各机构在图示位置时的速度多边形。
3-2 在如图所示的齿轮-连杆组合机构中,试用瞬心法求齿轮1与3的传动比ω1/ω3。
顺时针)(v 1613361331361331613113P P P PP P P P P ===ωωωω3-3在如图3-32所示的四杆机构中,LAB=60mm ,LCD=90mm ,LAD=LBC=120mm ,ω2=rad/s ,试用瞬心法求:(1) 当φ=165°时,点C 的速度vc;(2) 当φ=165°时,构件3的BC 线上(或延长线上)速度最小的一点E 的位置及其速度的大小;(3) 当vC=0时,φ角之值(有两个解)。
sm EP P P v P P v s m v s rad P P P P P P P P E C C CD C P /36.0143.055.2v (rad/s 55.2158.0403.0/403.009.048.4(/48.438.21738.9710v 133133431334341424122424142441224224=⨯=======⨯=⨯==⨯====ωωωωωωωω顺时针)顺时针)3-4在如图3-33所示的凸轮机构中,已知r=50mm ,LOA=30mm ,LAC=90mm ,φ1=90°,凸轮1以角速度ω1=10rad/s 逆时针转动。
试用瞬心法求从动件的角速度ω2。
顺时针)(/79.286.12486.3410v 2312131212231221312112s rad P P P P P P P P P =⨯====ωωωω 3-5在如图3-34所示的各机构中,已知各构件的尺寸及B 点的速度vB ,试作出其如图3-34所示位置时的速度多边形。
3-6在如图3-35所示的各机构中,已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动,试以图解法求机构在如图3-35所示位置时构件3上C 点的速度及角速度。
3-8A BCDEbk ec3。
第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
3-2 计算题图3-1所示各机构(或运动链)的自由度。
并判断其中是否含有复合铰链、局部自由度或虚约束?如有,请指出。
(b)
(d)
(g)
题图3-1
答:
(a )064===H L p ,p ,n ,0624323=⨯-⨯=-=L p n F 。
因为 0=F ,所以不能成为机构。
(b )143===H L p ,p ,n ,01423323=-⨯-⨯=--=H L p p n F 。
因为0=F ,所以不能成为机构。
(c )032===H L p ,p ,n ,0322323=⨯-⨯=-=L p n F 。
因为0=F ,所以不能成为机构。
(d )01410===H L p ,p ,n ,214210323=⨯-⨯=-=L p n F 。
因为 2F ==原动件数,所以能成为机构。
(e )075===H L p ,p ,n ,123=--=H L p p n F 。
D 处有一个复合铰链。
(f )186===H L p ,p ,n , 32362811L H F n p p =--=⨯-⨯-=,I 处有一个局部自由度;B 或C 处的移动副为虚约束;I 处的两个高副之一为虚约束。
(g ) 滚子B 和M 为局部自由度,没有复合铰链和虚约束,因此9=n ,12=L P ,2=H P ,于是该运动链的自由度为:121229323=-⨯-⨯=--=H L P P n F 。
由于该运动链的自由度等于原动件数目,因此具有确定的运动。
3-3 题图3-2所示为一回转式三缸内燃发动机的机构简图。
其中A 、B 、C 处三个活塞,它们依次点火推动从动件绕O 2转动。
(1) 计算机构的自由度。
并指出存在的复合铰链、局部自由度或冗余约束。
(2) 说明该发动机是由哪种四杆机构组成的。
题图3-2
解:机构的自由度为1。
O 1处有复合铰链。
曲柄滑块机构。
无局部自由度和冗余约束。
注:O 1O 2有一个杆。
3-6 试计算题图3-4所示两种8杆机构的自由度,并进行ADAMS 模型运动仿真。
题图3-4
解:两个机构的自由度都为1。
3-7 现要设计一个可调两侧车轮距离的月球探测车,其主体机构拟采用如题图3-5所示的平面六边形机构ABCDEF 。
通过控制安装在铰链A 、B 、C 、D 、E 、F 处的若干电机来改变六边形的形状,达到调整2和5构件之间的距离(即两侧车轮的距离)的目的。
请问,至少需要安装多少个电机才能使该六边形机构具有可控制的形状?为什么?
题图3-5
解:至少需要安装3个电机才能使得六边形机构ABCDEF 具有可控制的形状。
首先选取构件6(其他构件也可以)作为机架,则该六边形机构具有5个活动构件,6个转动副,所以机构的自由度为:362532345=⨯-⨯=--=p p n F 。
3-10 试通过杆组分析来说明题图3-7所示各机构的组成原理。
a) b)
题图3-7。