机械原理第3章作业参考
- 格式:doc
- 大小:195.00 KB
- 文档页数:4
二、平面机构运动分析1.图示平面六杆机构的速度多边形中矢量ed代表,杆4角速度ω4的方向为时针方向。
题1图题6图2.当两个构件组成移动副时,其瞬心位于处。
当两构件组成纯滚动的高副时,其瞬心就在。
当求机构的不互相直接联接各构件间的瞬心时,可应用来求。
3.3个彼此作平面平行运动的构件间共有个速度瞬心,这几个瞬心必定位于上。
含有6个构件的平面机构,其速度瞬心共有个,其中有个是绝对瞬心,有个是相对瞬心。
4.相对瞬心与绝对瞬心的相同点是,不同点是。
5.速度比例尺的定义是,在比例尺单位相同的条件下,它的绝对值愈大,绘制出的速度多边形图形愈小。
6.图示为六杆机构的机构运动简图及速度多边形,图中矢量cd代表,杆3角速度ω3的方向为时针方向。
7.机构瞬心的数目N与机构的构件数k的关系是。
8.在机构运动分析图解法中,影像原理只适用于。
9.当两构件组成转动副时,其速度瞬心在处;组成移动副时,其速度瞬心在处;组成兼有相对滚动和滑动的平面高副时,其速度瞬心在上。
10.速度瞬心是两刚体上为零的重合点。
11.铰链四杆机构共有个速度瞬心,其中个是绝对瞬心,个是相对瞬心。
12.速度影像的相似原理只能应用于各点,而不能应用于机构的的各点。
13.作相对运动的3个构件的3个瞬心必。
14.当两构件组成转动副时,其瞬心就是。
15.在摆动导杆机构中,当导杆和滑块的相对运动为动,牵连运动为动时,两构件的重合点之间将有哥氏加速度。
哥氏加速度的大小为;方向与的方向一致。
16.相对运动瞬心是相对运动两构件上为零的重合点。
17.车轮在地面上纯滚动并以常速v前进,则轮缘上K点的绝对加速度αK=αk n=V K n/KP。
---------------------------------------( )18.高副两元素之间相对运动有滚动和滑动时,其瞬心就在两元素的接触点。
---( )19.在图示机构中,已知ω1及机构尺寸,为求解C 2点的加速度,只要列出一个矢量方程a C2=a B2+a n C2B2+a t C2B2就可以用图解法将a C2求出。
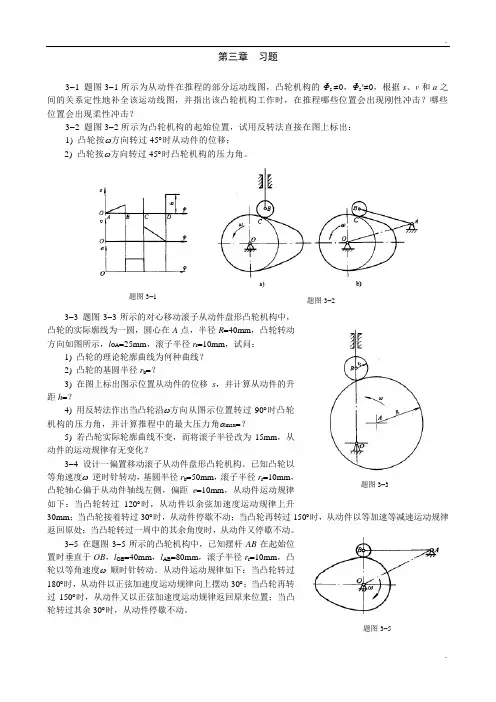
.. 第三章 习题3-1 题图3-1所示为从动件在推程的部分运动线图,凸轮机构的Φs ≠0,Φs '≠0,根据s 、v 和a 之间的关系定性地补全该运动线图,并指出该凸轮机构工作时,在推程哪些位置会出现刚性冲击?哪些位置会出现柔性冲击?3-2 题图3-2所示为凸轮机构的起始位置,试用反转法直接在图上标出:1) 凸轮按ω方向转过45︒时从动件的位移;2) 凸轮按ω方向转过45︒时凸轮机构的压力角。
3-3 题图3-3所示的对心移动滚子从动件盘形凸轮机构中,凸轮的实际廓线为一圆,圆心在A 点,半径R =40mm ,凸轮转动方向如图所示,l OA =25mm ,滚子半径r r =10mm ,试问:1) 凸轮的理论轮廓曲线为何种曲线?2) 凸轮的基圆半径r b =?3) 在图上标出图示位置从动件的位移s ,并计算从动件的升距h =?4) 用反转法作出当凸轮沿ω方向从图示位置转过90︒时凸轮机构的压力角,并计算推程中的最大压力角αmax =?5) 若凸轮实际轮廓曲线不变,而将滚子半径改为15mm ,从动件的运动规律有无变化?3-4 设计一偏置移动滚子从动件盘形凸轮机构。
已知凸轮以等角速度ω 逆时针转动,基圆半径r b =50mm ,滚子半径r r =10mm ,凸轮轴心偏于从动件轴线左侧,偏距e =10mm ,从动件运动规律如下:当凸轮转过120︒时,从动件以余弦加速度运动规律上升30mm ;当凸轮接着转过30︒时,从动件停歇不动;当凸轮再转过150︒时,从动件以等加速等减速运动规律返回原处;当凸轮转过一周中的其余角度时,从动件又停歇不动。
3-5 在题图3-5所示的凸轮机构中,已知摆杆AB 在起始位置时垂直于OB ,l OB =40mm ,l AB =80mm ,滚子半径r r =10mm ,凸轮以等角速度ω 顺时针转动。
从动件运动规律如下:当凸轮转过180︒时,从动件以正弦加速度运动规律向上摆动30︒;当凸轮再转过150︒时,从动件又以正弦加速度运动规律返回原来位置;当凸轮转过其余30︒时,从动件停歇不动。
第三章凸轮机构及其设计3 - 1 判断题(正确的在其题号后括号内打√,否则打×)(1)为了避免从动件运动失真,平底从动件凸轮轮廓不能内凹。
( )(2)若凸轮机构的压力角过大,可用增大基圆半径来解决。
( )(3)从动件作等速运动的凸轮机构有柔性冲击。
( )(4)凸轮的基圆一般是指以理论轮廓上最小向径所作的圆。
( )(5)滚子从动件盘形凸轮的理论轮廓是滚子中心的轨迹。
( )解答:(1)√(2)√(3)×(4)√(5)√3 - 2 填空题(1)对于外凸凸轮,为了保证有正常的实际轮廓,其滚子半径应理论轮廓的最小曲率半径。
(2)滚子从动件盘形凸轮机构的基圆半径是从到的最短距离。
(3)在凸轮机构中,从动件按等加速等减速运动规律运动时,有冲击。
(4)绘制凸轮轮廓曲线时,常采用法,其原理是假设给整个凸轮机构加上一个与凸轮转动角速度ω的公共角速度,使凸轮相对固定。
(5)直动平底从动件盘形凸轮机构的压力角为,其基圆半径应按条件确定。
解答:(1)小于(2)凸轮回转中心到凸轮理论轮廓(3)柔性冲击(4)反转法相反的(5)0 按全部廓线外凸的条件设计基圆半径3 - 3 简答题(1)凸轮机构中,常用的从动件运动规律有哪几种?各用于什么场合?解答:1)等速运动规律刚性冲击(硬冲)低速轻载2)等加速、等减速运动规律柔性冲击中低速轻载3)简谐(余弦)运动规律柔性冲击中低速中载4)正弦加速度运动规律无冲击中高速轻载5)3-4-5多项式运动规律无冲击中高速中载(2)何谓凸轮机构的压力角?压力角的大小与凸轮基圆半径r0有何关系?压力角的大小对凸轮的传动有何影响?解答:在不计摩擦时,凸轮作用在从动件上推力作用线与从动件受力点的绝对速度方向所夹锐角称为压力角,称为凸轮机构的压力角。
基圆半径愈大,机构压力角愈小,但机构愈不紧凑;基圆半径愈小,机构压力角愈大,机构易自锁,效率低,但机构紧凑。
(3)滚子从动件盘形凸轮机构与尖底从动件盘形凸轮机构凸轮轮廓曲线是否相同?为什么?解答:不同。
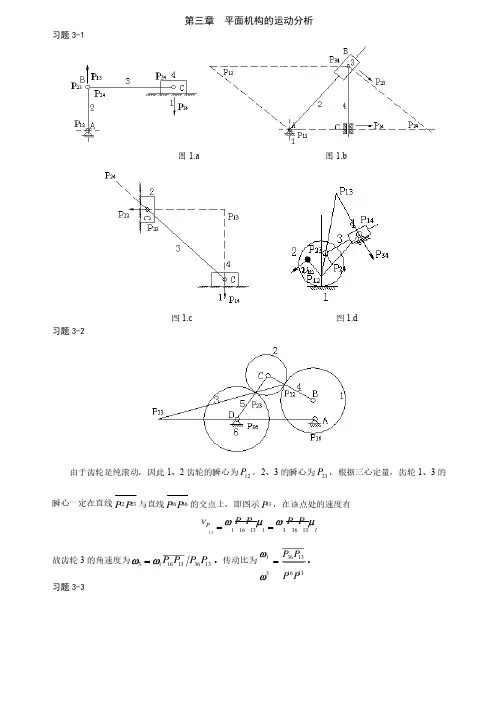
第三章平面机构的运动分析习题3-1 图1.a 图1.b 图1.c 图1.d 习题3-2 由于齿轮是纯滚动,因此1、2齿轮的瞬心为12P ,2、3的瞬心为23P ,根据三心定量,齿轮1、3的瞬心一定在直线2312P P与直线3616P P 的交点上,即图示13P ,在该点处的速度有ll P PP P P P v m w m w 133631316113==故齿轮3的角速度为1336131613P P P P w w =。
传动比为1316133631P P P P =w w 。
习题3-3答:1)三个瞬心中,14P、12P 为绝对瞬心,24P 为相对瞬心。
2)不利用其它的三个瞬心,因为它们全是相对瞬心。
3)构件2和4之间的转向关系可以根据瞬心24P 的瞬时绝对速度方向判断。
的瞬时绝对速度方向判断。
习题3-4取比例尺为mmm l 003.0=m ,作图如下,作图如下1) 由图上可知:l l P P P P P v m w m w 241442412224==,根据量得的长度,得,根据量得的长度,得s rad P P P P/455.414.72/14.32102414241224=´==w w 可计算出C 点的速度为:s m CD v l C /4.0003.030455.44=´´==m w2) 构件1、3的瞬心在点13P 处,且为绝对瞬心,因此构件3的角速度为的角速度为()s rad C P v l c /53.2)67.52003.0/(4.0133=´==mw 显然构件3上速度最小点在E 点,则其速度为点,则其速度为s m EP v l E /36.0003.04.4753.2133=´´==mw 3) 要使0=C v ,需瞬心12P 、24P 重合(如图),两位置分别为0126'=Ð=DAB j ,02227''=Ð=DAB j 。
平面连杆机构运动学分析3-15已知:LAE=70mm,LAB=40mm,LEF=60mm,LDE=35mm,LCD=75mm,LBC=50mm,原动件以等角速度w1=10rad/s 回转。
试以图解法求在θ1=50°时C 点的速度VC 和加速度ac.先对机构进行位置分析:由封闭形ABCDEA 与AEFA 有:12634L L L L L +=++164''L L L =+即23416L L L L L --=+(1) 416''L L L -+=(2)(1)位置方程中由1式可得:22334411622334411L cos L cos L cos(180)L cos(180)L L sin L sin L sin(180)L sin(180)θθθθθθθθ--+︒=-+︒+⎧⎨--+︒=-+︒⎩ (3) 由2式可得441164411L'cos L'cos L L'sin L'sin 0θθθθ-+=⎧⎨-+=⎩ (4) 解得c 11221122X L cos(180)L cos Y L sin(180) L sin cθθθθ=+︒+⎧⎨=+︒+⎩ (5) (2)速度方程223344223344441441L sin L sin L cos(180)0L cos L cos L cos(180)000L'sin cos 00L'cos sin θθθθθθθθθθ-+︒⎡⎤⎢⎥--+︒⎢⎥⎢⎥⎢⎥-⎣⎦2341L'w w w ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦=11111111L sin(180)L cos(180)L'sin -L'cos θθθθ+︒⎡⎤⎢⎥-+︒⎢⎥⎢⎥⎢⎥⎣⎦ (6)解得cx 111222cy21222V L w sin(180)w L sin V =Lw cos(180)w L cos θθθθ=-+︒-⎧⎪⎨+︒+⎪⎩ (7)(3)加速度方程223344222 232233442223334444441444111441L sin L sin L sin 0 w L cos w L cos -w L cos 0L cos L cos L cos 0w L sin -w L sin -w L sin 000L'sin cos 00w L'cos -w sin L''00L'cos sin 00θθθθθθααθθθθθθαθθθθθθ---⎡⎤⎡⎤⎢⎥⎢⎥--⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦444112111311111111411111w L'sin w cos w L cos w L sin w w L'cos vsin w L'sin vcos L'w w w θθθθθθθθ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥+⎢⎥⎢⎥+⎣⎦⎣⎦(8)解得:22cx 11122222222cy111222222 w L cos w L cos a L sin w L sin w L sin a L cos αθθθαθθθ⎧=--⎪⎨=-+⎪⎩ (9)注意到,关于位置的四个方程组成的方程组是关于三角函数的非线性超越方程。
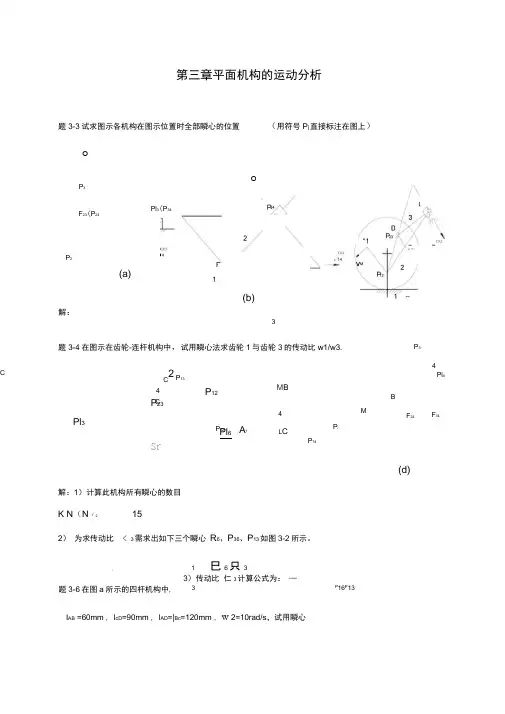
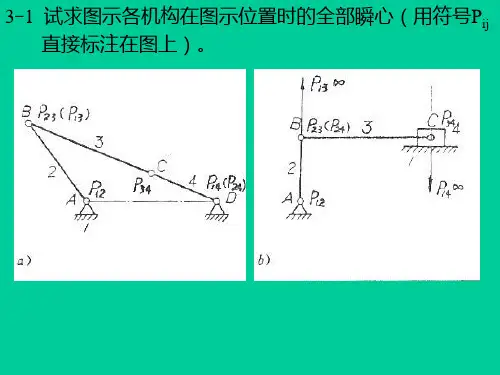
O OO OP 2P 3F 23(P 24Pl 3(P 34)(a)(b)Pl 3Pl 6A 1题3-6在图a 所示的四杆机构中,第三章平面机构的运动分析题3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P j 直接标注在图上)解:题3-4在图示在齿轮-连杆机构中,试用瞬心法求齿轮1与齿轮3的传动比w1/w3.C 2P 12P 23St -解:1)计算此机构所有瞬心的数目K N (N1)2152) 为求传动比 < 3需求出如下三个瞬心 R 6、P 36、P 13如图3-2所示。
; 1 巳6只33) 传动比 仁3计算公式为: —3P 16P 13I AB =60mm , l cD =90mm , l AD =|Bc =120mm , w 2=10rad/s ,试用瞬心P134 C 4L CP 12AM B3P iP 34CBMF 24F 34P ?4(d)Pl 4法求:V B3I AB2IAB lBPI32.56rad sV ClCR 3 3 0.4m s量得 1 26.42 226.6P 3434B P 233 22A ,D- i Pl4P 12 1(a)P 131) 当0 =165。
时,点C 的速度Vc ;2) 当$ =165。
时,构件3的BC 线上速度最小的一点 E 的位置及速度的大小; 3) 当Vc=O 时,0角之值(有两个解)解:1)以选定比例尺,绘制机构运动简图。
(图3-3 )2)求V c ,定出瞬心P 13的位置。
如图 3-3 (a )3)定出构件3的BC 线上速度最小的点 E 的位置。
因为BC 线上速度最小的点必与 P 13点的距离最近,所以过 P 13点引BC 线延长线的垂线交于 E 点。
如图3-3 (a )v E1ER 3 3 0.375ms4)当V C 0时,P 13与C 点重合,即AB 与BC 共线有两个位置。
作出 V C 0的两个位置。
题3-12在图示的各机构中,设已知各构件的尺寸、原动件 1以等角速度3 1顺时针方向转动。
第3章机构结构的分析与设计§3.1 本章例题例3-1 绘制图3-1所示液压泵机构的机构运动简图。
解:该机构由机架1、原动件2和从动件3、4组成,共4个构件,属于平面四杆机构。
机构中构件1、2,构件2、3,构件4、1之间的相对运动为转动,即两构件间形成转动副,转动副中心分别位于A、B、C点处;构件3、4之间的相对运动为移动,即两构件间形成移动副,移动副导路方向与构件3的中心线平行。
构件1的运动尺寸为A、C两点间距离,构件2的运动尺寸为A、B两点之间的距离,构件3从B点出发,沿移动副导路方向与构件4在C点形成移动副,构件4同时又在C点与构件1形成转动副。
选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。
选择比例尺=0.001m/mm,分别量出各构件的运动尺寸,绘出机构运动简图,并标明l原动件及其转动方向,如图3-1所示。
例3-2 绘制图3-2所示偏心泵的机构运动简图,写出机构的关联矩阵和邻接矩阵。
解:图示机构中已标明原动件,构件6为机架,其余构件为从动件。
需要注意的是,在区分构件时应正确判断图中各构件都包括哪些部分,例如:构件3就包括两部分,如图所示。
该机构中构件1与机架以转动副连接,转动副中心位于固定轴的几何中心A点处;构件2除与构件1形成回转中心位于C点的转动副外,又与构件3形成移动副,移动副导路沿BC方向;构件3也绕固定轴上一点B转动,即构件3与机架形成的转动副位于B点,同时构件3与构件2形成移动副,又与构件4形成中心位于D点的转动副;构件4与构件5形成中心位于E 点的转动副;构件5与机架6形成沿垂直方向的移动副。
该机构属于平面机构,因此选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。
选择比例尺l μ=0.001m/mm ,量出各构件的运动尺寸,绘出机构运动简图,并标明原动件及其转动方向,如图3-2所示。
例3-3 计算图3-3所示压榨机机构的自由度。
解:机构为平面机构。
第3章3—1 何谓速度瞬心?相对瞬心与绝对瞬心有何异同点?答:参考教材30~31页。
3—2 何谓三心定理?何种情况下的瞬心需用三心定理来确定?答:参考教材31页。
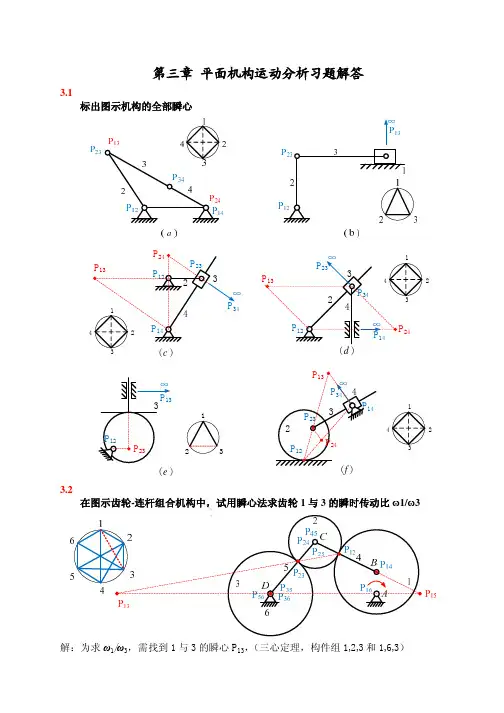
3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上) (a)(b)答:答:(10分)(d)(10分)3-4标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比ω1/ω3。
答:1)瞬新的数目:K=N(N-1)/2=6(6-1)/2=152)为求ω1/ω3需求3个瞬心P 16、P 36、P 13的位置3)ω1/ω3= P 36P 13/P 16P 13=DK/AK由构件1、3在K 点的速度方向相同,可知ω3与ω1同向。
3-6在图示的四杆机构中,L AB =60mm ,L CD =90mm,L AD =L BC =120mm, ω2=10rad/s,试用瞬心法求:1)当φ=165°时,点的速度vc ;2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小;3)当V C =0时,φ角之值(有两个解)。
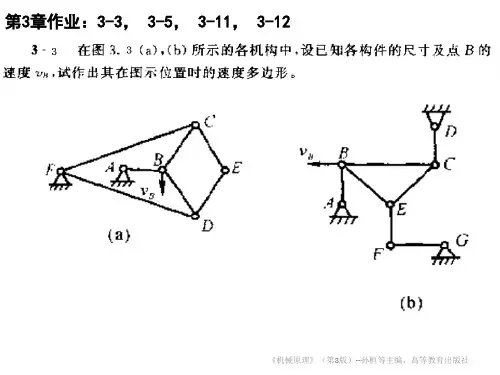
解:1)以选定的比例尺μ机械运动简图(图b )2)求vc 定出瞬心p12的位置(图b ) 因p 13为构件3的绝对瞬心,则有ω3=v B /lBp 13=ω2l AB /μl .Bp 13=10×0.06/0.003×78=2.56(rad/s)v c =μc p 13ω3=0.003×52×2.56=0.4(m/s)3)定出构件3的BC 线上速度最小的点E 的位置,因BC 线上速度最小的点必与p13点的距离最近,故丛p13引BC 线的垂线交于点E ,由图可得(2分)(3分)v E=μl.p13Eω3=0.003×46.5×2.56=0.357(m/s)4)定出vc=0时机构的两个位置(图c)量出φ1=26.4°φ2=226.6°3-8机构中,设已知构件的尺寸及点B的速度v B(即速度矢量pb),试作出各机构在图示位置时的速度多边形。
3-2 在如图所示的齿轮-连杆组合机构中,试用瞬心法求齿轮1与3的传动比ω1/ω3。
顺时针)(v 1613361331361331613113P P P PP P P P P ===ωωωω3-3在如图3-32所示的四杆机构中,LAB=60mm ,LCD=90mm ,LAD=LBC=120mm ,ω2=rad/s ,试用瞬心法求:(1) 当φ=165°时,点C 的速度vc;(2) 当φ=165°时,构件3的BC 线上(或延长线上)速度最小的一点E 的位置及其速度的大小;(3) 当vC=0时,φ角之值(有两个解)。
sm EP P P v P P v s m v s rad P P P P P P P P E C C CD C P /36.0143.055.2v (rad/s 55.2158.0403.0/403.009.048.4(/48.438.21738.9710v 133133431334341424122424142441224224=⨯=======⨯=⨯==⨯====ωωωωωωωω顺时针)顺时针)3-4在如图3-33所示的凸轮机构中,已知r=50mm ,LOA=30mm ,LAC=90mm ,φ1=90°,凸轮1以角速度ω1=10rad/s 逆时针转动。
试用瞬心法求从动件的角速度ω2。
顺时针)(/79.286.12486.3410v 2312131212231221312112s rad P P P P P P P P P =⨯====ωωωω 3-5在如图3-34所示的各机构中,已知各构件的尺寸及B 点的速度vB ,试作出其如图3-34所示位置时的速度多边形。
3-6在如图3-35所示的各机构中,已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动,试以图解法求机构在如图3-35所示位置时构件3上C 点的速度及角速度。
3-8A BCDEbk ec3。
1.根据凸轮的工作轮廓线,画出理论轮廓线
2.以凸轮转动中心为圆心,找出与凸轮理论
轮廓线内切的最小圆即为基圆
3. 凸轮理论轮廓线距凸轮转动中心最近处,
为推程开始点;凸轮理论轮廓线距凸轮转动
中心连向最远处,为推程结束点
4.从推程开始至结束,凸轮转过的角度(也
就是图中推杆相对凸轮反向转过的角度)即
为推程角。
回程角同理可得。
5.推程如图。
3-6b
1.凸轮逆时针转动,所以推杆相对凸轮顺时针转
2.图中与偏置圆相切的最短线为推程的起点,最长线为
推程的终点
3.从推程开始至结束,凸轮转过的角度(也就是图中推
杆相对凸轮反向转过的角度)即为推程角。
回程角同理
可得。
4.在推程的终点,推杆相对起点(基圆上的点)升高的
距离为推程
1.两圆心连线一定过切点(接触点),所以连接OB并延长,可找到滚子在B点接触时的圆心。
O
2.画出理论轮廓线并找出推杆顶尖的位置A'和B',之后作图和分析均以理论轮廓线及推杆的“尖顶”为依据。
3.画出偏置圆,画出推杆的位置,得到转角。
4画出基圆,得到位移S B
5.画出滚子与凸轮接触处公法线(正压力方向),得到压力角。