斯伦贝谢旋转导向系统 Power-V 使用介绍
- 格式:doc
- 大小:28.00 KB
- 文档页数:2

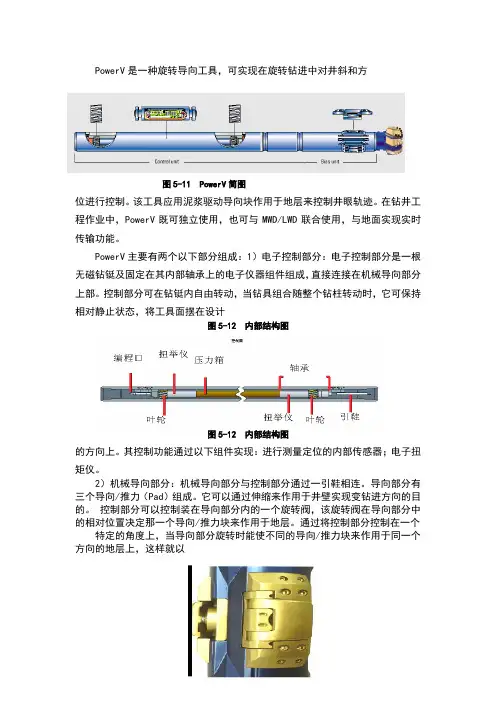
PowerV是一种旋转导向工具,可实现在旋转钻进中对井斜和方图5-11 PowerV简图位进行控制。
该工具应用泥浆驱动导向块作用于地层来控制井眼轨迹。
在钻井工程作业中,PowerV既可独立使用,也可与MWD/LWD联合使用,与地面实现实时传输功能。
PowerV主要有两个以下部分组成:1)电子控制部分:电子控制部分是一根无磁钻铤及固定在其内部轴承上的电子仪器组件组成,直接连接在机械导向部分上部。
控制部分可在钻铤内自由转动,当钻具组合随整个钻柱转动时,它可保持相对静止状态,将工具面摆在设计图5-12 内部结构图图5-12 内部结构图的方向上。
其控制功能通过以下组件实现:进行测量定位的内部传感器;电子扭矩仪。
2)机械导向部分:机械导向部分与控制部分通过一引鞋相连。
导向部分有三个导向/推力(Pad)组成。
它可以通过伸缩来作用于井壁实现变钻进方向的目的。
控制部分可以控制装在导向部分内的一个旋转阀,该旋转阀在导向部分中的相对位置决定那一个导向/推力块来作用于地层。
通过将控制部分控制在一个特定的角度上,当导向部分旋转时能使不同的导向/推力块来作用于同一个方向的地层上,这样就以图5-13导向/推力块图使钻进朝同一个固定方向进行。
PowerV下入井底钻进后,电子控制部分的内部传感器(磁力仪和重力加速仪等)测量到井斜和方位,与地表设定的设计工具面进行比较,然后通过引鞋(控制部分)及与之相连的控制导向轴(导向部分)控制旋转阀,决定那个导向/推力块在设计的方向伸出作用于井图5-14 旋转阀壁,实现对井眼轨迹的控制。
当PowerV起出井眼后,可以通过编程口下载出存储在控制部分内部存储器内的数据然后对数据进行详细分析,确定工具在井下的工作情况。
PowerV防斜打直机理PowerV在井下工作后,电子控制部分的内部传感器(磁力仪和重力加速仪等)测量到井底的井斜和方位,与设定的工具面(180度,重力低边)进行比较,控制引鞋的方向,使机械导向部分的三个导向/推力块在每个转动周期当转到上井壁(高边)时在泥浆液压作用下伸出,作用于上井壁,改变钻头作用方向,切削下井壁(低边),实现降斜的目的。
旋转导向钻井技术及Power-V导向系统介绍摘要:旋转导向钻井技术主要指井眼轨迹自动控制的闭环自动钻井技术,是20世纪90年代初期发展起来的一项钻井新技术,代表着当今国际钻井技术的最新发展方向,对超深井、超薄油层水平井、大位移井、分支水平井等轨迹控制具有独特效果。
本文分析了旋转导向钻井系统的技术特点,介绍了国内外旋转导向钻井系统的发展、应用情况。
并详细介绍了斯伦贝谢公司旋转导向系统Power-V的组成和工作原理。
1.概述所谓旋转导向钻井,是指钻柱在旋转钻进过程中实现过去只有传统泥浆马达才能实现的准确增斜、稳斜、降斜或者纠方位功能。
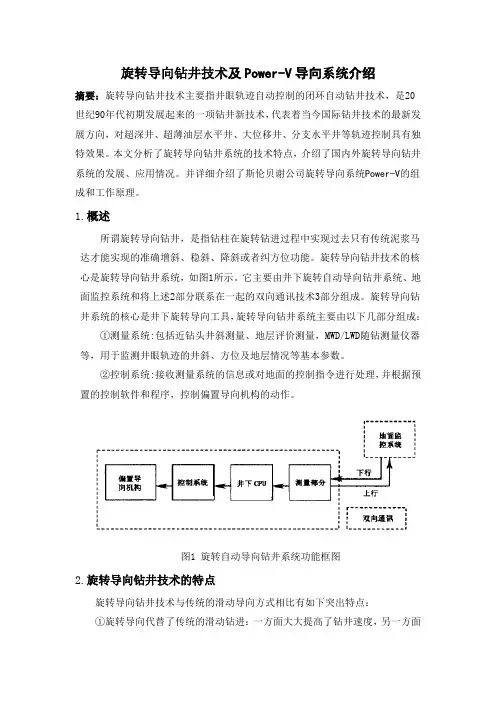
旋转导向钻井技术的核心是旋转导向钻井系统,如图1所示。
它主要由井下旋转自动导向钻井系统、地面监控系统和将上述2部分联系在一起的双向通讯技术3部分组成。
旋转导向钻井系统的核心是井下旋转导向工具,旋转导向钻井系统主要由以下几部分组成:①测量系统:包括近钻头井斜测量、地层评价测量,MWD/LWD随钻测量仪器等,用于监测井眼轨迹的井斜、方位及地层情况等基本参数。
②控制系统:接收测量系统的信息或对地面的控制指令进行处理,并根据预置的控制软件和程序,控制偏置导向机构的动作。
图1 旋转自动导向钻井系统功能框图2.旋转导向钻井技术的特点旋转导向钻井技术与传统的滑动导向方式相比有如下突出特点:①旋转导向代替了传统的滑动钻进:一方面大大提高了钻井速度,另一方面解决了滑动导向方式带来的诸如井身质量差、井眼净化效果差及极限位移限制等缺点,从而大大提高了钻井安全性,解决了大位移井的导向问题;②具有不必起下钻自动调整钻具导向性能的能力,大大提高了钻井效率和井眼轨迹控制的灵活性,可满足高难特殊工艺井的导向钻井需要;③具有井下闭环自动导向的能力,结合地质导向技术使用,使井眼轨迹控制精度大大提高。
旋转导向钻井技术的上述特点,使其可以大大提高油气开发能力和开发效率,降低钻井成本和开发成本,满足了油气勘探开发形势的需要。

【机械仪表】斯伦贝谢旋转导向系统 Power-V 简介1 Power-V 简介和应用范围Power-V是斯伦贝谢旋转导向系统PowerDrive家族中的一员。
所谓旋转导向系统,是指让钻柱在旋转钻进过程中实现过去只有传统泥浆马达才能实现的准确增斜、稳斜、降斜或者纠方位功能,但相对于泥浆马达,PowerDrive有非常明显的优点。
旋转导向系统广泛用于使用泥浆马达进行滑动钻进时比较困难的深井、大斜度井、大位移井、水平井、分枝井(包括鱼刺井),以及易发生粘卡的情况。
2 旋转导向系统PowerDrive的优点⑴反映和降低了所钻井段的真正狗腿度,使井眼更加平滑。
用泥浆马达打30m井段,滑动钻进15m,转动钻进15m,井斜角增加4°,得到平均狗腿度4°/30m。
实际上,转钻15m井斜角几乎没有变化,这15m的实际狗腿度是零;而4°的井斜角变化是由滑钻15m产生的,这15m的实际狗腿度是8°/30m。
而用Power-V在同一设置下打出的每米都是同样均匀和平滑的,减少了井眼轨迹的不均匀度,从而减少了在起下钻和钻进过程中钻具实际所受的拉力和扭矩,减少了以后下套管和起下完井管串的难度。
⑵使用Power-V钻出的井径很规则。
使用传统泥浆马达在滑动井段的井径扩大很多,而转动井段的井径基本不扩大。
这种井径的忽大忽小是井下事故的隐患,也不利于固井时水泥量的计算。
⑶由于Power-V钻具组合中的所有部分都在不停的旋转,大大降低了卡钻的机会。
使用传统泥浆马达在滑动钻进时除钻头外,其它钻具始终贴在下井壁上,容易造成卡钻。
⑷在钻进过程中,由于Power-V组合中的所有钻具都在旋转,这有利于岩屑的搬移,大大减少了形成岩屑床的机会,从而更好的清洁井眼。
这对于大斜度井、大位移井、水平井意义很大。
⑸由于Power-V钻具组合一直在旋转,特别有利于水平井、大斜度井和3000m以下深井中钻压的传递,可以使用更高的钻压和转盘转速,有利于提高机械钻速。
旋转导向操作手册2019-01-12目录第一章旋转导向仪器的简介 (1)第二章旋转导向仪器的原理与参数 (1)第三章旋转导向仪器的作业安全 (3)第四章旋转导向仪器作业流程 (4)第五章 ToolCom NT的设置及工具检测 (6)第六章 TIP的设置 (18)第七章 DownLink 的设置 (25)第八章常见问题处理方法 (29)第一章旋转导向仪器的简介建立在先进闭环循环系统成功应用的基础上,在旋转导向的设计中,运用了最新的随钻测量技术。
这种第三代系统开拓了定向井钻井的新领域,包括双向地质导向和大位移钻井。
该工具可以在旋转钻进过程中实现导向,改变井眼轨迹,并与地面双向通讯。
旋转导向系统,可提供近钻头井斜、方位伽马、电磁波传播电阻率、实时压力和振动测量。
旋转导向服务具有以下几个方面的优势:1.旋转中实现导向:降低摩阻扭矩、实现井眼清洁、更高机械钻速、减少压差卡钻、提高钻头性能、提高井眼质量、节约时间。
2.自动导向控制:精准的水平段垂深控制、降低井眼屈曲。
3.地层评价和压力:精确的地质导向和井眼轨迹控制、电磁波传播电阻率、方位伽马、钻具内、环空和静液压力。
4.双向通讯:多样的随钻测量指令、可调导向(工具面)、可调狗腿度、一趟钻打完井段、适应环境的传输。
第二章旋转导向仪器的原理与参数LWD-O can realize formation oil, gas and water interface and evaluation of geosteering, this feature on a drill collar length to achieve the orientation, gamma, resistivity, borehole pressure and drilling tool vibration measurement functions, and other projects.SpecificationsMaximum Temperature 300°F (150°C)Maximum Rotation Rate 400 rpmDiameter 6.75 in.Min Hole 8.38 in. (21 cm)Max Hole 9.88 in. (25 cm)Weight 3660 lbs (1660 kg)Max Lost Circulation Material 40 ppb=114 kg/m3Dogleg Severity Standard drilling string(With Drill Collar)10°/100 ft (Rotation)16°/100 ft (No rotation)Flexible drilling string assembly(With compression rod)15°/100 ft (Rotation)25°/100 ft (No rotation)Power 300 WVoltage 33 Vdc (± 1 V)ResistivityPhase 0.1 - 3000 ohm-m (2 MHz)0.1 - 1000 ohm-m (4 MHz)Attenuation 0.1 - 500 ohm-m (2 MHz)0.1 - 200 ohm-m (4 MHz)Pressure probeRange 0 - 25000 psiAzimuth moduleProbe Type Tri-axial Accelerometer &Tri-axial Flux GateMTF/GTF 3°Inclination 0° - 180°Azimuth 0° - 360°Tool Surface (M/G) 0° - 360°Dip Angle -90° - +90°Vibration typeProbe Type Axial vibration z-AccelerometerLateral vibration x-y Accelerometer Range 0 to ± 15 gRotating & stick slipProbe Type Two Axis MagnetometerRange 0 to ± 1000 rpmAccuracy ± 1%GR probeTool Type Scintillation Range0-500 APIAccuracy ± 2.5 API/100 APIVertical Resolution 6 in. (15.3 cm)The R otary S teerable S ystem based on advanced closed-loop circulation system on the basis of successful application, using the new MWD technology in the design of RSS. This new system opens up a new field of directional well drilling, including the two-way geosteering drilling and large displacement. The tool can realize direction in the rotary drilling; improve the borehole trajectory and two-way communication with the surface.SpecificationsMaximum Temperature 300°F (150°C)Maximum Pressure 20,000psi (140MPa) (1406kg/cm2) Diameter 6.75 in.Hole Diameter 8.5 in. / 9.5 in. / 9.875 in.Weight 905 lbs (410 kg )Make-Up Length 7.2 ft. (2.2 m)Made Slope 0 - 6.5° /100 ft (30 m)Dogleg Severity 13°/100 ft. (Rotation)20°/100 ft. (No rotation)第三章旋转导向仪器的作业安全3.1GENERAL SAFETYRead documentation fully before working on the equipment.Oilfield safety operating standards should be practiced at all times while handling and operating the equipment.Obtain appropriate authorization before powering up the equipment in restricted areas.Gas monitoring should be in place as required.Observe environmental standards. Maintain work area clean at all times. Wipe down equipment after each run in the hole.LWD tool operating person should remain clear during rig up and testing of third party surface and downhole equipment.3.2 ELECTRONICSTo reduce the risk of electric shock, only handle the tool when it is powered down. If it is necessary to handle the tool when powered up, wear insulating rubber gloves underneath normal work gloves and if possible ensure that there is an earth clip attached to the tool.The equipment should be powered up by trained person only.Do not leave the equipment unattended when it is powered up.Do not work alone when using high voltage equipment. Have someone else in the area who knows how to turn off the power.Due to inductive and capacitive elements in the LWD equipment, voltage levels may persist after powering down.If it is necessary to have the electronics exposed when the tool is powered up, take properprecautions to reduce the risk of shock.Do not open the surface system box without first disconnecting the main power supply.3.3DRILL COLLARThe drill collar is very heavy, it should be moved by trained person only; the person must wear safety shoes and gloves. Also electronic circuit is installed on the drill collar, it is necessary to pay more attention to transportation, fixed firmly to prevent the shaking.3.4RSU safety特别注意在运输和现场吊装的时候保护好导向头,起钻和下钻的时候一定要收起肋板,做好记录。


PD(PowerDrive)简单介绍旋转导向系统,是指让钻柱在旋转钻进过程中实现准确增斜、稳斜、降斜或者纠方位功能旋转导向系统广泛用于使用泥浆马达进行滑动钻进时比较困难的深井、大斜度井、大位移井、水平井、分枝井(包括鱼刺井),以及易发生粘卡的情况。
1.1 旋转导向系统PowerDrive的优点反映和降低了所钻井段的真正狗腿度,使井眼更加平滑。
使用PowerDrive钻出的井径很规则由于PowerDrive钻具组合中的所有部分都在不停的旋转,大大降低了卡钻的机会。
在钻进过程中,由于PowerDrive组合中的所有钻具都在旋转,这有利于岩屑的搬移,大大减少了形成岩屑床的机会,从而更好的清洁井眼。
由于PowerDrive钻具组合一直在旋转,特别有利于水平井、大斜度井和3000米以下深井中钻压的传递,可以使用更高的钻压和转盘转速,有利于提高机械钻速。
1.2 PowerDrive 组成部分PowerDrive主要有两个组成部分,它们分别是上端的Control Unit (电子控制部分,简称CU)和下端的Bias Unit (机械部分,简称BU)。
在两者中间还有一个辅助部分Extension Sub(加长短接,简称ES) 。
1.2.1 电子控制部分CUCU是PowerDrive的指挥中枢,它内部有泥浆驱动的发电机,还有陀螺、钻柱转速传感器、流量变化传感器、震动传感器、温度传感器以及电池控制的时钟等等。
它可以独立于外面的钻铤而旋转或者静止不转。
简要工作原理开泵后,发电机发电,陀螺测量到井底的井斜角和方位角,然后按照地面工程师的要求把其内部的电子控制部分固定在某一个方位上,从而实现无论钻柱如何旋转,CU内部的控制轴始终对准在需要的方位上,这个方位加上一个校对值后就是地面工程师所需要的高边工具面角的反方向。
如果需要调整这个控制轴的方位角,可以由地面工程师给PowerDrive发送命令,方法是:按照一定的时间编排方式,在不同的时间开不同的工作排量,CU内部的传感器探测到这个排量的变化后,由其内部的程序对其进行核对,如果与预先设定的某个指令吻合,就开始执行这个新的工作指令。
POWERV 简介
示意图
POWERV 是一种旋转导向工具,它可用于在旋转钻进中实现对井斜和方位的控制。
该系统是有控制器和偏置器两部分组成的,其中控制器是由一根无磁钻挺及固定在内部轴乘上的控制部件组成的,该控制部件轴向固定在无磁钻挺内,并通过以下部件实现其控制作用。
1.可以在空间及在钻挺内部进行测量定位的内部传感器。
2.电子扭距仪用来实现磁力刹车。
控制部件机械连接于一个偏置装置。
偏置装置(BU)
偏置装置有三个支撑块组成,它可以通过泥浆压力的作用使其伸缩来作用于井壁—从而达到实现改变钻井方向的目的。
控制部件可以通过控制装在偏置装置内的一个旋转阀,该旋转阀在偏置装置中的相对位置来决定使那一个支撑块来作用与地层。
通过将控制部件控制在一个特定的角度上,当偏置装置旋转时能使不同的支撑块来作用于同一个方向的地层,这样就可以使钻进朝同一个固定方向进行,从而达到降斜和控制井眼轨迹的目的。
斜口引鞋控制旋转阀
旋转阀
控制部件的控制是通过对所需要的角度与从磁力计和重力加速计等所得到的角度进行比较来实现的。
BHA的导向方位是通过对控制部件与地层的相对角度来控制的。
当控制部件起出井眼后,可以输出自动存储在内部存储器内的数据并进行分析,通过对数据的详细分析可以了解工具的工作情况。
通过顶部可对其编程,输入指令及导出数据。
降斜措施:
1.提高转盘转速,每提高一转,多作用于井壁3次;
2.提高排量(泵冲)以提高对井壁的作用力-降斜力;
3.减少钻压,降低增斜力;。
斯伦贝谢PowerDrive vorteX Max高动力RSS系统
朱丽华
【期刊名称】《钻采工艺》
【年(卷),期】2017(40)6
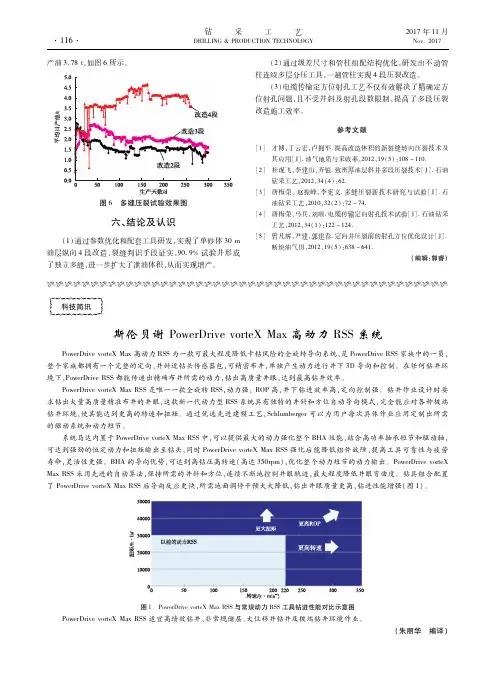
【摘要】PowerDrive vorteX Max高动力RSS为一款可最大程度降低卡钻风险
的全旋转导向系统,是PowerDrive RSS家族中的一员,整个家族都拥有一个完整的定向、井斜近钻头传感器包,可精密布井,单独产生动力进行井下3D导向和控制。
在任何钻井环境下,PowerDrive RSS都能传递出精确布井所需的动力,钻出高质量
井眼,达到最高钻井效率。
PowerDrive vorteX Max RSS是唯一一款全旋转RSS,
动力强,ROP高,井下钻进效率高,定向控制强。
【总页数】1页(P116-116)
【关键词】旋转导向系统;vorteX;RSS;钻井效率;定向控制;钻进效率;传感器;ROP 【作者】朱丽华
【作者单位】
【正文语种】中文
【中图分类】TE243
【相关文献】
1.斯伦贝谢推出小井眼高造斜率旋转导向系统 [J], 张瑜(编译);
2.2010年世界石油十四项大奖——哈里伯顿公司的PowerReach系统、油田救助、贝克休斯公司的流量控制系统、斯伦贝谢公司的Ocean软件开发构架…… [J], 朱
桂清; 李万平
3.斯伦贝谢研制成功无线动力驱动旋转导向系统 [J],
4.斯伦贝谢公司PowerDrive Orbit*钻进导向系统 [J], 肖圣;李总南
5.斯伦贝谢推出最新超高温PowerDrive ICE旋转导向系统 [J], 朱丽华
因版权原因,仅展示原文概要,查看原文内容请购买。
斯伦贝谢旋转导向系统Power-V 使用介绍
1 Power-V 简介和应用范围
Power-V是斯伦贝谢旋转导向系统PowerDrive家族中的一员。
所谓旋转导向系统,是指让钻柱在旋转钻进过程中实现过去只有传统泥浆马达才能实现的准确增斜、稳斜、降斜或者纠方位功能,但相对于泥浆马达,PowerDrive有非常明显的优点。
旋转导向系统广泛用于使用泥浆马达进行滑动钻进时比较困难的深井、大斜度井、大位移井、水平井、分枝井(包括鱼刺井),以及易发生粘卡的情况。
2 旋转导向系统PowerDrive的优点
⑴反映和降低了所钻井段的真正狗腿度,使井眼更加平滑。
用泥浆马达打30m井段,滑动钻进15m,转动钻进15m,井斜角增加4°,得到平均狗腿度4°/30m。
实际上,转钻15m井斜角几乎没有变化,这15m的实际狗腿度是零;而4°的井斜角变化是由滑钻15m产生的,这15m的实际狗腿度是 8°/30m。
而用Power-V在同一设置下打出的每米都是同样均匀和平滑的,减少了井眼轨迹的不均匀度,从而减少了在起下钻和钻进过程中钻具实际所受的拉力和扭矩,减少了以后下套管和起下完井管串的难度。
⑵使用Power-V钻出的井径很规则。
使用传统泥浆马达在滑动井段的井径扩大很多,而转动井段的井径基本不扩大。
这种井径的忽大忽小是井下事故的隐患,也不利于固井时水泥量的计算。
⑶由于Power-V钻具组合中的所有部分都在不停的旋转,大大降低了卡钻的机会。
使用传统泥浆马达在滑动钻进时除钻头外,其它钻具始终贴在下井壁上,容易造成卡钻。
⑷在钻进过程中,由于Power-V组合中的所有钻具都在旋转,这有利于岩屑的搬移,大大减少了形成岩屑床的机会,从而更好的清洁井眼。
这对于大斜度井、大位移井、水平井意义很大。
⑸由于Power-V钻具组合一直在旋转,特别有利于水平井、大斜度井和3000m以下深井中钻压的传递,可以使用更高的钻压和转盘转速,有利于提高机械钻速。
使用泥浆马达在大井斜的长裸眼段滑动钻进时送钻特别困难,经常是上部的钻杆已经被压弯了,而钻压还没有传递到钻头上,还常常引发随钻震击器下击,损害钻头寿命。
3 Power-V 组成部分和工作原理简介
Power-V主要有两个组成部分,它们分别是上端的Control Unit
(电子控制部分,简称CU) 和下端的Bias Unit (机械部分,简称BU)。
在两者中间还有一个辅助部分Extension Sub(加长短接,简称ES) 3.1 电子控制部分CU
CU是Power-V的指挥中枢,它内部有泥浆驱动的发电机,还有陀螺、钻柱转速传感器、流量变化传感器、震动传感器、温度传感器以及电池控制的时钟等等。
它可以独立于外面的钻铤而旋转或者静止不转。
工作原理:开泵后,发电机发电,陀螺测量到井底的井斜角和方位角(即高边),然后按照地面工程师的要求把其内部的电子控制部分固定在某一个方位上(即高边工具面角),从而实现无论钻柱如何旋转,CU内部的控制轴始终对准在需要的方位上,这个方位加上一个校对值后就是地面工程师所需要的高边工具面角的反方向。
如果需要调整这个控制轴的方位角,可以由地面工程师给Power-V发送命令,方法是:按照一定的时间编排方式,在不同的时间开不同的工作排量,CU内部的传感器探测到这个排量的变化后,由其内部的程序对其进行核对,如果与预先设定的某个指令吻合,就开始执行这个新的工作指令。
3.2 机械部分BU
BU是一个纯机械执行装置,主要一个泥浆导流阀和三个由泥浆推动的pad (推力块或者叫伸缩片)。
这个导流阀与电子控制部分CU的控制轴相连,其方向由控制轴的方位而定。
有2%~5%的泥浆首先经过这个导流阀分流,然后流向转到该方向上的某个推力块A,推力块A就伸出,推挤井壁,井壁对钻头产生一个反作用力,这就是所谓的钻头侧向力,从而把钻头推向地面工程师所需要的方位。
该推力块A转过这个位置后,泥浆的液压作用就转向下一个转到这里来的推力块B,从而推力块B伸出。
而推力块A则会在井壁对其的挤压下缩回去,周而复始,由此实现旋转导向功能。
推力块在那个方位伸出、伸出次数的几率(百分比)都是由地面工程师通过电子控制部分决定的。
对井壁推力的大小是由钻头压降决定的,可以由地面人员通过调节排量而进行控制。
3.3 加长短接ES
其内部装有一个泥浆滤网,负责过滤分流后驱动机械部分BU当中推力块(pad)的泥浆。