5-第二章 平面四杆机构的设计
- 格式:ppt
- 大小:792.00 KB
- 文档页数:20

第五章 平面连杆机构及其设计 §5-1平面连杆机构的应用及传动特点§5-2平面四杆机构的类型和应用§5-3平面四杆机构的一些共性问题§5-4 平面四杆机构的设计1)低副便于加工、润滑;构件间压强小、磨损小、承载能力大、寿长;2)连杆机构型式多样,可实现转动、移动、摆动、平面复合运动等运动形式间的转换。
如:锻压机肘杆机构,单侧曲线槽导杆机构,汽车空气泵,可变行程滑块机构,等。
一、平面连杆机构的优点和应用平面连杆机构:各构件全部用低副联接而成的平面机构(低副机构).例如:四足机器人(图片、动画)、内燃机中的曲柄滑块机构、汽车刮水器、缝纫机踏板机构、仪表指示机构等。
曲柄滑块机构摆动导杆机构常见平面连杆机构:铰链四杆机构(雷达天线,飞剪,搅拌机)锻压机肘杆机构可变行程滑块机构3)可用于远距离操纵、重载机构,如:自行车手闸机构,挖掘机等。
4)连杆曲线丰富,可实现特定的轨迹要求,如:搅拌机构,鹤式起重机等。
挖掘机搅拌机构鹤式起重机二、平面连杆机构的缺点1)运动副中的间隙会造成较大累积误差,运动精度较低。
2)多杆机构设计复杂,效率低。
3)多数构件作变速运动,其惯性力难以平衡,不适用于高速。
多杆机构大都是四杆机构组合或扩展的结果。
本章介绍四杆机构的分析和设计。
六杆机构及六杆机构的实际应用一、 铰链四杆机构的基本型式和应用铰链四杆机构:全部用回转副联接而成的四杆机构。
连架杆——与机架相联的构件;周转副——组成转动副的两个构件作整周相对转动的转动副;曲柄1——作整周定轴回转的构件;摇杆3——作定轴摆动的构件;转动副摆转副(C、D)周转副(A、B)铰链四杆机构分为:曲柄摇杆机构、双曲柄机构和双摇杆机构。
1.曲柄摇杆机构铰链四杆机构中,若两连架杆中有一个为曲柄,另一个为摇杆,则称为曲柄摇杆机构。
实现转动和摆动的转换。
雷达天线俯仰机构缝纫机踏板机构应用(动画演示):雷达天线俯仰角调整机构,飞剪机构,搅拌机构,摄影机抓片机构、缝纫机踏板机构等。




第2章平面连杆机构教案(精选5篇)第一篇:第2章平面连杆机构教案第2章平面连杆机构平面连杆机构——由若干个构件通过平面低副(转动副和移动副)联接而构成的平面机构,也叫平面低副机构平面连杆机构具有承载能力大、结构简单、制造方便等优点,用它可以实现多种运动规律和运动轨迹,但只能近似地实现所要求的运动。
最简单的平面连杆机构由四个构件组成,简称平面四杆机构。
是组成多杆机构的基础只介绍四杆机构§2-1 平面四杆机构的基本类型及其应用一,铰链四杆机构铰链四杆机构——全部由回转副组成的平面四杆机构,它是平面四杆机构最基本的形态。
如图2-1a所示,铰链四杆机构由机架4、连架杆(与机架相连的 1、3两杆)和连杆(与机架不相联的中间杆2)组成。
如图所示曲柄——能绕机架上的转动副作整周回转的连架杆。
摇杆——只能在某一角度范围(小于360°)内摆动的连架杆。
铰链四杆机构按照连架杆是曲柄还是摇杆分为曲柄摇杆机构、双曲柄机构、双摇杆机构三种基本型式。
1、曲柄摇杆机构曲柄摇杆机构——两连架杆中一个是曲柄,一个是摇杆的铰链四杆机构。
当曲柄为原动件时,可将曲柄的连续转动,转变为摇杆的往复摆动。
应用:雷达调整机构2、双曲柄机构两连架杆均为曲柄的铰链四杆机构称为双曲柄机构。
当原动曲柄连续转动时,从动曲柄也作连续转动如图所示在双曲柄机构中,若其相对两杆相互平行如右图所示,则成为或平行四边形机构(平行双曲柄机构)。
如图所示当平行四边形机构的四个铰链中心处于同一条直线上时,将出现运动不确定状态,一般采用相同机构错位排列的方法,来消除这种运动不确定状态。
如图所示应用:在机车车轮联动机构中,则是利用第三个平行曲柄来消除平行四边形机构在这种死点位置的运动不确定性。
3、双摇杆机构两连架杆均为摇杆的铰链四杆机构称为双摇杆机构应用:飞机起落架通过用移动副取代转动副、变更杆件长度、变更机架和扩大转动副等途径,可以得到铰链四杆机构的其他演化型式二,含一个移动副的四杆机构 1,曲柄滑块机构通过将摇杆改变为滑块,摇杆长度增至无穷大,可得到曲柄滑块机构,如图所示对心曲柄滑块机构与偏置曲柄滑块机构曲柄滑块机构应用于活塞式内燃机2、导杆机构在图所示曲柄滑块机构中,若改取杆1为固定构件,即得导杆机构。
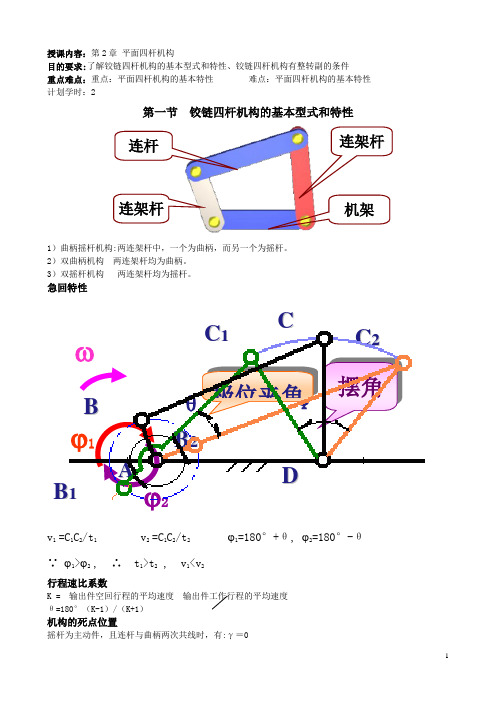
授课内容:第2章 平面四杆机构目的要求:了解铰链四杆机构的基本型式和特性、铰链四杆机构有整转副的条件重点难点:重点:平面四杆机构的基本特性 难点:平面四杆机构的基本特性 计划学时:2第一节 铰链四杆机构的基本型式和特性1)曲柄摇杆机构:两连架杆中,一个为曲柄,而另一个为摇杆。
2)双曲柄机构 两连架杆均为曲柄。
3)双摇杆机构 两连架杆均为摇杆。
急回特性v 1 =C 1C 2/t 1 v 2 =C 1C 2/t 2 ϕ1=180°+θ, ϕ2=180°-θ ∵ ϕ1>ϕ2 , ∴ t 1>t 2 , v 1<v 2行程速比系数K = 输出件空回行程的平均速度 输出件工作行程的平均速度θ=180°(K-1)/(K+1)机构的死点位置摇杆为主动件,且连杆与曲柄两次共线时,有:γ=0连架杆连杆连架杆机架摆角 θψ C 1C 2DAB 1B 2Bϕ1Cωϕ2极位夹角此时机构不能运动,称此位置为:“死点”避免措施:两组机构错开排列,如火车轮机构;靠飞轮的惯性第二节 铰链四杆机构有整转副的条件平面四杆机构具有整转副可能存在曲柄整转副存在的条件最长杆与最短杆的长度之和应≤其他两杆长度之和整转副是由最短杆(曲柄)与其邻边组成的当满足杆长条件时,说明存在整转副,当选择不同的构件作为机架时,可得不同的机构。
如 曲柄摇杆1 、曲柄摇杆2 、双曲柄、 双摇杆机构F’’’’ B CA BE FD CGA B CDl 1l 2 l 3 l 4授课内容:第2章平面四杆机构(§2.3—§2.4)目的要求:了解铰链四杆机构的基本型式和特性、铰链四杆机构有整转副的条件重点难点:重点:平面四杆机构的基本特性难点:平面四杆机构的基本特性计划学时:22.3 铰链四杆机构的演化通过前面的学习,我们知道在铰链四杆机构中,可根据两连架杆是曲柄还是摇杆,把铰链四杆机构分为三种基本形式——曲柄摇杆机构、双曲柄机构、双摇杆机构,而后两种可视为曲柄摇杆机构取不同构件作为机架的演变。





3.4 图解法设计平面四杆机构3.4.1按连杆位置设计四杆机构1.给定连杆的三个位置给定连杆的三个位置设计四杆机构时,往往是已知连杆B C的长度L B C和连杆的三个位置B1C1和B2C2和B3C3时,怎样设计四杆机构呐?图解过程。
::1::::2::2.给定连杆的两个位置给定连杆的两个位置B1C1和B2C2时与给定连杆的三个位置相似,设计四杆机构图解过程如下。
①选定长度比例尺绘出连杆的两个位置B1C1、B2C2。
②连接B1B2、C1C2,分别作线段B1B2和C1C2的垂直平分线B12和C12,分别在B12和C12上任意取A,D两点,A,D两点即是两个连架杆的固定铰链中心。
连接A B1、C1D、B1C1、A D,A B1C1D即为所求的四杆机构。
③测量A B1、C1D、A D计算l A B、L C D L A D的长度,由于A点可任意选取,所以有无穷解。
在实际设计中可根据其他辅助条件,例如限制最小传动角或者A、D的安装位置来确定铰链A、D的安装位置。
例设计一振实造型机的反转机构,要求反转台8位于位置Ⅰ(实线位置)时,在砂箱7内填砂造型振实,反转台8反转至位置Ⅱ(虚线线位置)时起模,已知连杆B C长0.5m和两个位置B1C1、B2C2.。
要求固定铰链中心A、D在同一水平线上并且A D=B C。
自己可以试着在纸上按比例作出图形,再求出各杆长度。
若想对答案请点击例题祥解3.4.2 按行程速度变化系数设计四杆机构1.设计曲柄摇杆机构按行程速度变化系数K设计曲柄摇杆机构往往是已知曲柄机构摇杆L3的长度及摇杆摆角ψ和速度变化系数K。
怎样用作图法设计曲柄摇杆机构?2.设计曲柄摆动导杆机构已知机架长度l4和速度变化系数K,设计曲柄导杆机构。
①求出极位夹角②根据导杆摆角ψ等于曲柄极位夹角θ,任选一点C后可找出导杆两极限C m、C n。
③作∠M C N的角评分线,取C A=,得到A点,过A点作C m和C n的垂线B1和B2两点,A B1(或A B2)即为曲柄。


第三章 平面四杆机构的设计§3—1 平面连杆机构的特点、类型及应用1.1 概 述连杆机构:各构件之间用低副和刚性构件连接起来实行运动传递的机构。
如图2-1 分为平面连杆机构和空间连杆机构 。
连杆机构由连架杆,连杆和机架组成。
平面连杆机构的特点:1.2平面连杆机构的基本类型和结构特点:由于连杆机构的构件一般呈杆状,也以其构件的数量称为多杆机构。
平面杆机构是最基本最常用的连杆机构。
1.2.1 平面连杆机构的基本类型:1) 曲柄摇杆机构 2)双曲柄机构 3)双摇杆机构 1.2.2 平面连杆机构演化 1) 转动副转化为移动副 2)取不同的构件为机架 3)变换构件的形态 4)扩大转动副的尺寸§3—2 平面连杆机构的运动特性2.1平面连杆机构的运动特性:(1Grashoff 定理(简称曲柄存在条件):如图示a + d ≤b + cb ≤ d – a +c c ≤d – a + b a ≤ c a + b ≤ c + da ≤b a +c ≤ b +d a ≤ d a + d ≤ b + c在全铰链四杆机构中,如果最短杆与最长杆杆长之和小于或等于其余两杆杆长之和,则必然存在作整周转动的构件。
若不满足上述条件,即最短杆与最长杆杆长之和大于其余两杆杆长之和,则不存在作整周转动的构件。
(2)四杆机构从动件的急回特性:如图示四杆机构从动件的回程所用时间小于工作行程所用的时间,称为该机构急回特性。
急回特性用行程速比系数K 表示。
212112ϕϕ===t t v v K极位夹角θ—— 从动摇杆位于两极限位置时,原动件两位置所夹锐角。
θ越大,K 越大,急回特性越明显。
§3—3 平面连杆机构的传力特性3.1. 传动角与压力角:如图示在机构处于某一定位置时,从动件上作用力与作用点绝对速度方向所夹的锐角 α 称为压力角。
压力角的余角 γ( γ = 90°— α) 作为机构的传力特性参数,故称为传动角。

机械设计中的平面四杆机构设计机械设计中的平面四杆机构设计是一项关键的技术,它对于机械设备的运动性能和工作效率具有重要影响。
在本文中,我们将探讨平面四杆机构的设计原理和方法,并重点讨论几种常见的平面四杆机构设计。
1. 平面四杆机构的基本原理平面四杆机构是由四个杆件和四个转动副组成的机械系统。
其中,两个杆件为连杆,两个杆件为曲柄。
通过合理的连接和安排,平面四杆机构可以实现特定的运动轨迹和工作功能。
平面四杆机构通常具有四个连杆长度、四个连杆转动角度和四个面间夹角等参数,这些参数的选择和设计将直接影响机构的性能。
2. 平面四杆机构的设计方法在平面四杆机构的设计过程中,需要注意以下几个关键要素:2.1 机构类型选择根据具体的工作需求和运动特点,选择合适的平面四杆机构类型。
常见的类型包括双曲柄四杆机构、双滑块四杆机构和连杆滑块四杆机构等。
每种类型的机构都有其特点和适用范围,设计者需要根据具体情况做出选择。
2.2 运动轨迹设计平面四杆机构的设计目标之一是确定所需的运动轨迹。
通过合理设置连杆长度和转动角度等参数,设计者可以使机构实现所需的直线运动、往复运动或者特定的曲线轨迹等。
2.3 运动性能评估在设计过程中,需要对平面四杆机构的运动性能进行评估。
常见的评估指标包括机构速度、加速度、运动稳定性和工作效率等。
通过使用运动分析软件或者手工计算,可以得到机构的具体性能参数。
3. 常见的平面四杆机构设计在实际应用中,有几种常见的平面四杆机构设计。
3.1 双曲柄四杆机构双曲柄四杆机构由两个曲柄和两个连杆组成,具有简单的结构和稳定的运动特性。
它常用于需要往复运动的机械设备中,例如活塞式发动机。
3.2 双滑块四杆机构双滑块四杆机构包含两个滑块和两个连杆,可实现两个滑块的相对运动。
这种结构常用于需要同时进行两个工作操作的装置,比如双手操作的印刷机械。
3.3 连杆滑块四杆机构连杆滑块四杆机构是由两个连杆和两个滑块组成,其中一个滑块在连杆上滑动。