KRC4电伺服焊枪配置总结
- 格式:doc
- 大小:9.32 MB
- 文档页数:25
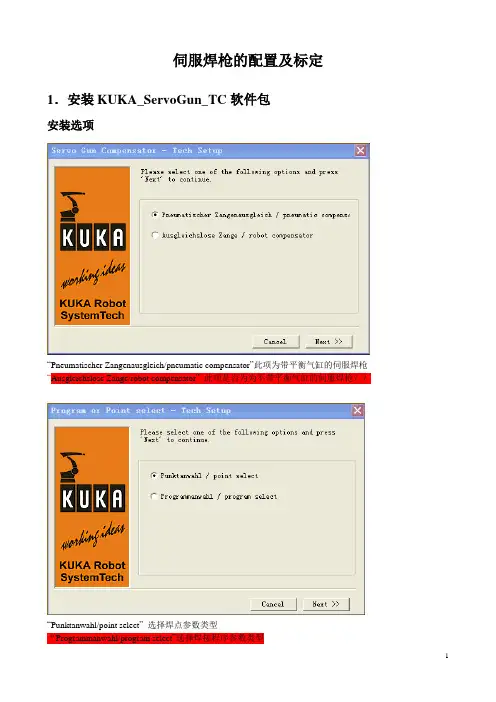
伺服焊枪的配置及标定1.安装KUKA_ServoGun_TC软件包安装选项“Pneumatischer Zangenausgleich/pneumatic compensator”此项为带平衡气缸的伺服焊枪“Ausgleichslose Zange/robot compensator”此项是否为为不带平衡气缸的伺服焊枪??“Punktanwahl/point select”选择焊点参数类型Axis:外步轴号Type:外部轴类型State:”static”为单枪状态,“coupled”为双枪状态,此选项为连接机器人状态,“decouled”为双枪状态,此项为未连接机器人状态。
设置双枪时,7/8轴的STATE选为DECOULED,此时,DSE和PM才可以选择相同的参数,实现ATC切换. DSE:设置为7PM:设置为121安装后执行冷启动(安装完毕)7轴的安全模块上需要进行短接,1&2进行短接,4&5&6进行短接!2.配置进入专家模式,Configure > Configuration ServoGun_TC.Gun Parameters选项PTP motions :默认LIN motions :默认Motor parameters :见KUKA提供的电机参数表16AMotor.Gun :“Gear ratio(减速比)*”参考焊枪制造商提供的参数,“Resolver pole pair no”参考KUKA电机参数表。
Maximum parameters: “Maximum opening”焊枪最大开口极限距离, “Software limit”焊枪负极开口软限位。
Gear ratio(减速比):减速比计算方法,焊枪伺服电机齿轮数除以传动齿轮数乘以丝杠LEAR值。
Configuration选项Timer type:除了TEST,其他都可选Gun configuration:选择焊枪类型X型或C型TCP orientation:静电极在工具坐标中的运动方向TCP correction:自动校正焊枪零位(设为ON)Tip detection:检测电极帽(设定为ON)Force gauge/Thickness:压力测量工具的厚度Init force:初始化压力,默认2.5KNMax.tip wear:电极帽最大磨削量(上下电极帽总和)Constant motion distance:默认值Calibration type:选择5PCalibration 5P选项(做此项工作前应先对焊枪进行零位标定,大小开软限位设置等等)。
伺服焊枪工作原理伺服焊枪是一种广泛应用于焊接行业的设备,其工作原理主要涉及到伺服系统和焊接控制系统。
在焊接过程中,伺服焊枪能够实现高精度的位置控制和稳定的动作,从而提高焊接质量和效率。
下面将为您详细介绍伺服焊枪的工作原理。
一、伺服系统1. 伺服电机伺服焊枪采用伺服电机作为驱动元件,伺服电机是一种可以实现精准位置控制的电机。
在焊接过程中,伺服电机通过接收控制系统发出的信号,调节电机转子的位置和速度,从而控制焊枪的运动轨迹和速度。
2. 编码器伺服电机通常配备有编码器,用于实时反馈电机的转子位置。
控制系统可以通过编码器的信号获取电机的实际位置,并与设定的目标位置进行比较,实现闭环控制,确保焊枪的运动精度和稳定性。
3. 伺服控制器伺服控制器是伺服系统的核心部件,负责接收控制系统发送的指令信号,并将其转换成电机控制信号。
通过对电机的控制,伺服控制器可以实现对焊枪位置、速度和加速度等参数的精准调节,以满足不同焊接工艺的要求。
二、焊接控制系统1. 焊接电源伺服焊枪通常与焊接电源相连接,焊接电源提供所需的电流和电压,通过焊枪输送到焊接件和焊丝,完成焊接操作。
焊接控制系统与焊接电源进行协调,确保焊接过程的稳定性和安全性。
2. 焊接参数控制焊接控制系统可以设置并控制焊接过程中的参数,如焊接电流、焊接速度、焊丝送丝速度等。
通过对这些参数进行精确调节,焊接控制系统能够实现不同焊接材料和厚度的焊接要求,确保焊接质量和稳定性。
伺服焊枪的工作原理主要包括伺服系统和焊接控制系统两部分。
通过伺服电机、编码器和伺服控制器的合作,实现对焊枪位置和速度的精确控制;焊接控制系统负责焊接参数的设置与控制,确保焊接过程的稳定性和质量。
伺服焊枪凭借其高精度的位置控制和稳定的动作,广泛应用于汽车制造、航空航天、家电等领域,并成为提高焊接质量和效率的重要设备。
希望上述介绍能对您有所帮助。
伺服焊枪:
要操做伺服焊枪做加压动作时,要切换到外部轴切换键,伺服焊枪才能打开,关才(按S+ S-)
电极的安装,在示教前,请务必使用没有磨损的新电极,进行修磨补偿后才能够进行示教。
装枪:焊枪放平,与机器人接近。
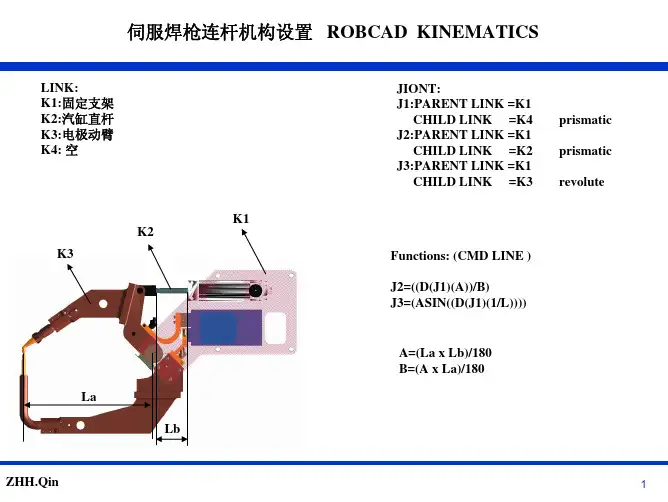
焊枪设置——进入系统——选择控制轴组——单击S1详细——将S1选为焊枪-1 并将其对应的AXIS BRK CV 设置为1 (附图)
点击确认后进入轴配置——选择滚珠丝杠——确认后进入滚珠丝杠设定画面(设定时参考焊枪图纸进行设定)——确认后进入电机规格的设定画面。
(附图)
动作范围(+)180MM
动作范围(-)20MM
减数比(分子)26
减数比(分母)50
滚珠丝杠节距10.030。
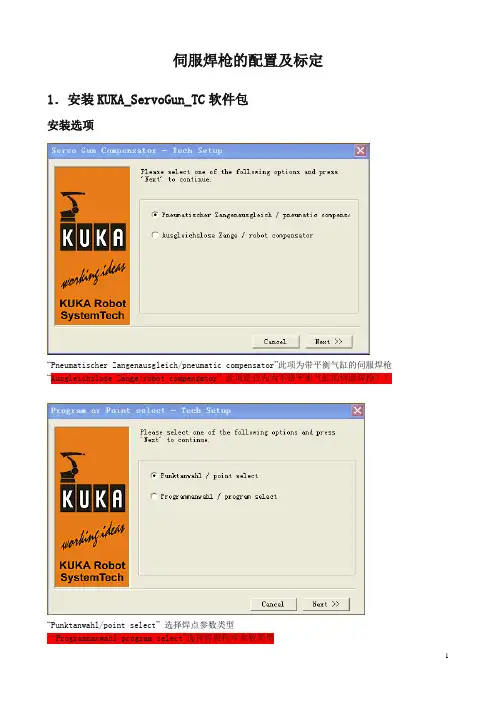
伺服焊枪的配置及标定1.安装KUKA_ServoGun_TC软件包安装选项“Pneumatischer Zangenausgleich/pneumatic compensator”此项为带平衡气缸的伺服焊枪“Ausgleichslose Zange/robot compensator”此项是否为为不带平衡气缸的伺服焊枪??“Punktanwahl/point select”选择焊点参数类型Axis:外步轴号Type:外部轴类型State:”static”为单枪状态,“coupled”为双枪状态,此选项为连接机器人状态,“decouled”为双枪状态,此项为未连接机器人状态。
设置双枪时,7/8轴的STATE选为DECOULED,此时,DSE和PM才可以选择相同的参数,实现ATC切换. DSE:设置为7PM:设置为121安装后执行冷启动(安装完毕)7轴的安全模块上需要进行短接,1&2进行短接,4&5&6进行短接!2.配置进入专家模式,Configure > Configuration ServoGun_TC.Gun Parameters选项PTP motions :默认LIN motions :默认Motor parameters :见KUKA提供的电机参数表 16AMotor.Gun :“Gear ratio(减速比)*”参考焊枪制造商提供的参数,“Resolver pole pair no”参考KUKA 电机参数表。
Maximum parameters: “Maximum opening”焊枪最大开口极限距离, “Software limit”焊枪负极开口软限位。
Gear ratio(减速比):减速比计算方法,焊枪伺服电机齿轮数除以传动齿轮数乘以丝杠LEAR值。
Configuration选项Timer type:除了TEST,其他都可选Gun configuration:选择焊枪类型X型或C型TCP orientation:静电极在工具坐标中的运动方向TCP correction:自动校正焊枪零位(设为ON)Tip detection:检测电极帽(设定为ON)Force gauge/Thickness:压力测量工具的厚度Init force:初始化压力,默认2.5KNMax.tip wear:电极帽最大磨削量(上下电极帽总和)Constant motion distance:默认值Calibration type:选择5PCalibration 5P选项(做此项工作前应先对焊枪进行零位标定,大小开软限位设置等等)。

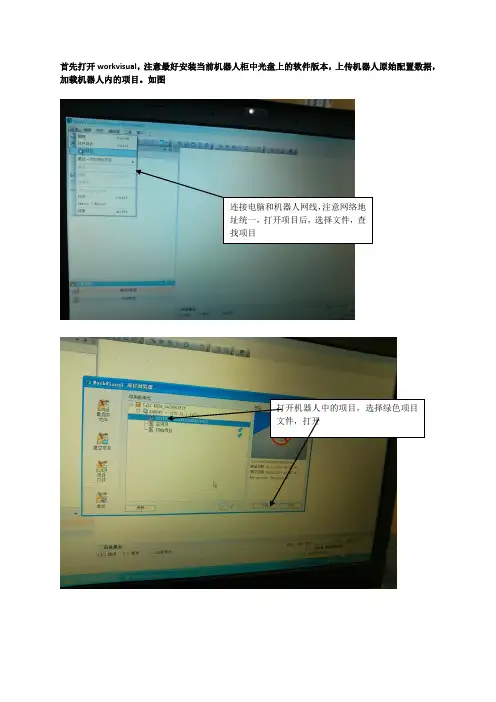
首先打开workvisual,注意最好安装当前机器人柜中光盘上的软件版本,上传机器人原始配置数据,加载机器人内的项目。
如图连接电脑和机器人网线,注意网络地址统一,打开项目后,选择文件,查找项目打开机器人中的项目,选择绿色项目文件,打开选中这个项目加载样本1选择当前机器人1机器人样本已加载2点击按钮,添加焊枪.AFC 文件,由甲方提供2点击添加按钮找到伺服枪.AFC文件,打开重复上述操作,进入该对话框,选择伺服枪文件,加载成功,关闭右击,添加焊枪和机器人样本添加对应机器人和焊枪样本至此已成功加载机器人和焊枪样本。
双击KUKA文件视图,激活项目,点击KUKA设备视图项目,打开编辑器,选择configure …relation空白处单击,生成小窗口,选择-ll-符号,从焊枪连接至机器人连接完成。
选择编辑器,机器参数配置。
单击joint1,生成各参数选择项将焊枪参数文件上传动比数值输入机器人对应项目菜单下,焊枪配置中,共用几个参数机器人打开配置-伺服枪-枪参数,打开当前界面,输入上图中的传动比-10.67,正向开口距离60,反向开口距离20(经验值),保存。
本项目中我们以枪闭合时为枪零点此时,打开,配置,外部轴,电机/轴传动比项会自动生成新数值,记录将机器人中显示的数据填入此处,查看电机名牌,写入电机额定转速写入正负向软件限位开关来自参数文件,如上面参数纸则写入0.000982,轴启动时间100,发电机。
斜坡,150,电机:M_H_KSP40_400V_V1 伺服:S_H_KSP40_400V_V1,其他参数不变。
KUKA需要提供电机和伺服文件如在motor中加载电机名称文件,如没有成功加载,则下载到机器人中时会出现报错窗口提示同理,成功加载servofile文件选择program number下载完成后,机器人会重新配置,之后,进入配置,安全配置,机器人自动弹出要求重新配置窗口,选择,刚刚激活一个workvisual项目如下图,点是!注意枪正反方向,如方向不同,可在机器人示教器中枪参数栏,把传动比数值取反!!以上是我们在配置枪时,要用到的数据。
目次前言 (3)1 目的.............................................................................42 范围.............................................................................43 规范性引用文件...................................................................44 术语和定义.......................................................................45 机器人集成标准...................................................................4 5.1 首次上电运行..........................................................41. 首次上电运行.........................................................4 5.2 机器人周边设备通讯及配置.................................................91. 机器人与PLC接口通讯................................................... 92. 机器人与焊枪、焊机接口配置............................................. 113. 机器人与抓手接口配置..................................................174. 机器人与水气单元配置..................................................185.3 机器人调试内容.........................................................191. 工具坐标建立.........................................................192. 工具重量测试.........................................................203. Tune枪.............................................................. 254. 抓放枪、抓放抓手调试...................................................355. 车身坐标系建立...................................................... 386. 点焊参数设定.........................................................407. 焊点路径调试.........................................................408. 干涉区设定.......................................................... 429.节拍优化.............................................................46 5.4 特殊功能机器人调试......................................................461. 涂胶调试.............................................................462. 弧焊调试.............................................................60 6 文件更改状态 (72)附件1:............................................................................73附件2:............................................................................错误!未定义书签。
川崎机器人伺服焊枪标定一.设定参数:1.打开辅助功能界面,如下图:2.伺服焊枪机械参数设定:点焊---伺服焊枪机械参数设定,如下图:如果设置焊枪1,射枪编号就写1伺服焊枪类型:普通枪(换枪选双枪)。
动作范围:上限按照焊枪参数表上的填写,下限一般情况下都是-200mm分辨率:转速比(马达转一圈焊枪走的行程)/8192=0.00.…然后在第一位不是0的数字开始,后面加上小数。
分辨率指数:小数点后移N位就是10的负N次方。
例:10.4(转速比)/8192=0.0012695=1.2695X10「分辨率就是1.2695分辨率指数填3。
动作方向:负(正方向开枪,负方向关枪)。
最高速度按照表格里面的填写,加速时间及以下4个都是0.05下面是焊枪参数表,每把焊枪都自带的。
3.伺服焊枪的的设定在示教器上打开辅助——点焊——伺服枪设定——射枪编号,如下图所示:间隙如果焊枪行程大于35mm两个参数都设为10.0mm,如果小于35mm设为5.0mm加压力:示教设为0.980长此磨损检测时0.98KN工具的+Z方向设为关闭,E系控制柜都选关闭,和枪关闭方向一致粘连检测粘枪时的检测,这个功能应该不能使用压入速度设为10mm/s加压前间隙可动侧,不动侧均为10加压后间隙可动侧,不动侧均为10伺服焊枪加压等待时间:焊接时10ms内焊枪没有打开时会报警。
枪尖接触信号:焊接时会发出的信号,可以用作防止焊枪不焊接。
研磨时的加压力:0.98KN焊枪修模时的压力。
研磨时的加压时间:修模时加压的时间一般1-1.2秒就够了。
最大加压限制值maxelectricforce4.000KN(根据参数表)4.加压力调整数据:打开辅助——点焊——加压力调整数据——射枪编号,如下图所示:根据此图设置上图?"设定加压力可和“值西画内苕,登陆、保存、选定时压力划值电疣值0.9803 1.4705 2.4508 3.43010 3.92012MAX=4根据参数表013 实际值由压力表测出5 .加压力补偿只填第一个空基准压力焊枪的最大压力与2.450KN 写小的那个(为了焊枪安全) 6 .磨损量检测出理四巴士理”*2*5*卬以&KN/3A-5irl 画工raxrwjI i 而£31[WJ小i1AICN/1QA J5KN/HA 口冉8*阿14独/竺]T4可记 |O r 9«K^/JAIO.9SMN/1AL7KM/1切7«^^ZdSKH/M 9.加空1业:永S41?7两麻fiA [1-4ZKN/SAp.*SKM/8AAfJ.45Kh/flLA ■大KH/KJAwpyiajj3jMN/lQ^I4itIX ;1OAiijji容许磨损量如果焊枪行程大于35mm两个参数都设为10.0mm,如果小于35mm设为5.0mm当前磨损量不用设置根据磨损检查自动生成铜板磨损基准值不变检测时的磨损率均设50%磨损信号复位信号可动侧和固定侧可以是同一信号磨损出错输出信号和磨损信号复位信号两侧可以填同一个信号磨损出错信号输出等级如果可动侧和固定侧最大磨损量允许为10mm,输出等级80%,磨损超过8mm就报错。
伺服枪安装设定零位标定Mastering the Gun伺服枪编码器故障复位Resetting BZAL (Battery Zero Alarm)执行BZAL复位步骤,需要重启1. 按示教板[MENUS] -> [NEXT] -> [SYSTEM] -> [Master/Cal]2. 按示教板[FCTN] ->[3: CHANGE GROUP]3. 按示教板[F3: RES PCA]4. 选择[F4: YES] (Reset pulse coder alarm?)5. 如有双枪选择GROUP 3重复2、36. 重新启动机器人(选择示教板[FCTN] ->[ Cycle the power])7. 机器人重新启动后SRVO-075 消除在做Mastering之前必须前激活编码器,方法同机器人,让枪动几下即可。
当激活以后示教板会提示:Pulse has been Established双枪单机情况下+Y/-Y是用来控制#2 Gun的零位标定完成以上的准备步骤以后,我们进入正式的设定流程。
按示教板按钮[MENUS] -> [Utilities] -> [TYPE] -> [Gun Setup]进入GunSetup页面。
这里将对之前的数据进行验证,并完焊枪开/闭方向、零位、变形量等一系列数据的测定注意:以下的设定必须一次执行!!1.按示教板按钮[MENUS] -> [Utilities] -> [TYPE] -> [Gun Setup]1.1 选择菜单[Set Gun Motion Sign]按 ENTER键关枪方向设定:同时按SHIFT、(+X)键,观察焊枪的运动方向,根据实际情况选择F4或者F5,告诉机器人:按下+X时枪会打开或者关闭??按照GM标准,+方向表示焊枪闭合方向然后按:[F3: COMP],完成1.2选择菜单[Set Gun specs, master gun] 按 ENTER 键回答YES,当示教板提示:是否知道枪的速比进入菜单后依次操作1.把伺服焊枪关上(上下电极帽轻轻碰到)后按[F4: CLOSE]2.在“****”处填入伺服枪铭牌上的速比(Tip Displacement:速比,每转一周Tip移动多少距离)3.在“****”处填入伺服枪铭牌上的张开极限(Open stroke limit:张开极限,根据焊枪铭牌数值填写)1.3 选择菜单[3: Auto Tune] 按下[Shift] + [F3:EXEC]选择[YES]后开始执行Auto Tune执行AutoTune,记住整个过程SHIFT始终要按住,并且机器人要在T2、100%速度情况下。
7.KUKA电伺服焊枪配置详解01KUKA ServoGun For Nimak硬件连接电伺服枪整体布局概览01 VKRC4 ED15 7轴(机器人+随行焊枪)02 VKRC4 ED15 7轴(机器人 + 固定焊枪)03 VKRC4 ED15 8轴(机器人 + 2*固定焊枪)04 VKR C4 ED15 8 轴(机器人 + 固定焊枪+ 随行焊枪)05 VKR C4 ED15 8轴(机器人 + KUKA 线性滑轨 + 随行焊枪)06 VKR C4 ED15 8轴(机器人 + KUKA 线性滑轨 + 固定焊枪)07 VKR C4 ED15 9轴(机器人 + KUKA 线性滑轨 + 固定焊枪+ 随行焊枪)08 VKR C4 ED15 9轴(机器人 + KUKA线性滑轨+ 2*固定焊枪)02KUKA Servogun For Nimak软件配置Workvisual电伺服焊枪配置右击“controller component” 选择“drive configuration”进入驱动配置界面,如图只有一个附加轴驱动输出接口(根据KPP的型号可以同时驱动多个附加轴)焊枪电机与驱动输出端口如何配置,视实际使用情况而定:如图左1两个电机公用一个驱动端口,两个电机必须允许耦合如图右1两个电机各用一个驱动端口,可以自由分配是否需要耦合(右击可以选择组合或分组、允许耦合或不允许耦合)选中左侧“controller component” 下面需要设置的焊枪,然后点击菜单快捷键的“ServoGun Editor”按钮进入相应伺服焊枪的设置界面Workvisual电伺服焊枪配置介绍:机器人初始化配置:1.导入user、makro2.导入NIMAK焊枪的.xml文件NIMAK每把电伺服焊枪都会配备一个存有该焊枪的xml文件,该文件中包含电机的各项参数(包括压力标定),我们直接导入即可·可以将机器人中已经配置好的焊枪数据导出·也可以将外部的焊枪配置文件加载到机器人中3.进行焊枪零点标定·标定零点可以手动也可自动·手动标定:更换新电极帽,目检电极帽合拢到稍微接触的状态,标定为零点即可·自动标定:枪口不易开口太大(合拢速度慢),按住使能按钮,点击自动零点标定,枪口会缓慢自动合拢,自动标定零点4.确定焊枪传动比手动将附加轴的电机旋转到360度,然后把E1的实际位置填入传动比对话框,保存数据即可·验证传动比:将焊枪开口开置大口,比如100,然后用卡尺测量实际开口是否为100左右,只要偏差不大即可5.伺服焊枪软件限位设置并验证·按照焊枪说明文件提供的开口进行软件限位设置;·设置负向软件限位开关:手动将焊枪开口打开到接近开口最大位置(打开时注意硬件有无干涉),然后应用实际位置到最大开口宽度中即可(当前版本是负值)·设置正向软件限位开关:按照焊枪说明文件设置焊枪的正向软件限位(同焊枪的最大挠度一致,或比最大挠度略小一点)·设置完后需要进行测试焊枪到达软件限位会不会停止6. 测力计厚度测量7.压力标定8.焊枪推移效应设置·根据焊枪实际情况来判断是否激活推移效应的补偿·如果是X型且电极杆是倾斜的焊枪,需要激活推移效应补偿,补偿方向是枪口向内的方向(Z方向),补偿值是夹紧力最大时的焊枪TCP推移的距离,该距离可以直接按照焊枪说明书填写,也可自行测量(只有在焊枪推移距离很大时,开启补偿才有意义)9.焊枪非对称挠度数据设置·根据焊枪实际情况来判断是否激活非对称挠度的补偿·如果是X型且电极杆是倾斜的焊枪,需要激活推移效应补偿,补偿方向是枪口向内的方向(Z方向),补偿值是夹紧力最大时的焊枪TCP推移的距离,该距离可以直接按照焊枪说明书填写,也可自行测量10.电机控制参数测试·该电机参数测试是否需要执行有待确认(暂时不要执行)·该界面的数值都是从焊枪的xml文件导入的·该测试类似气伺服的EMZ测试(空载无压力测试)·枪口成打开状态,点击电机参数按钮·机器人会自动进入一段编好的程序,正常T2模式下100%执行即可11.焊机通讯程序设置并测试:·博士控制器添加91号程序(截图为97号,现场使用是91号),主要设置内容是压力和电流。
KUKA机器人伺服连接1.安装伺服枪在机器人和连接焊枪伺服电机电缆。
2.安装伺服枪的软件。
(进入HMI最小化安装软件)3.使用workvisual软件,上载机器人的项目,在workvisual里配置焊枪。
-上载项目后,导入点焊软件Catalog文件夹里的焊钳样本。
-选择打开焊钳和机器人样本-选择正确的焊钳样本和机器人型号拉进项目里。
-如果焊钳安装在机器人法兰盘上-如果焊钳不安装在机器人法兰盘上-把所有的焊钳重复以上的步骤添加进入项目。
-激活项目-进入外部轴编辑器如果项目下载第2次或以上,需要导入所有外部轴数据文件-确认以下的参数-选择焊钳,然后定义焊钳使用模式。
(注意:所有焊钳都需要定义) --Point Name (焊点名):焊点名为焊接程序号,焊接程序号是根据焊点名的数字。
如果焊点名是SG123456789,有效位(Number of entities)设为7,那么焊接时所发的程序号就是焊点名后面的7位数(必须是数字),3456789焊接程序号。
-Program number (程序号):焊接指令里需要输入焊接程序号,焊接程序号与焊点名没有任何关系。
-Force from timer:焊接压力是在焊机(Timer)里输入,通过焊接程序号取得焊接压力。
如没有该选项,压力值是输入在焊接指令里。
-Thickness from timer:板厚是在焊机(Timer)里输入,通过焊接程序号取得焊接板厚。
这选项暂时不起任何作用。
-Equalization(补偿方式):选择焊钳气动补偿方式(Pneumatic)或机器人补偿方式(robot compensation)-Burn-Off Management (修磨量计算方式):选择百分比关系(relation in %)上电极和下电极的修磨量以50%:50%总修磨量的平均值或者个别检测(individual measurement)上电极和下电极分别单独检测修磨量。
首先打开workvisual,注意最好安装当前机器人柜中光盘上的软件版本,上传机器人原始配置数据,加载机器人内的项目。
如图
连接电脑和机器人网线,注意网络地
址统一,打开项目后,选择文件,查
找项目
打开机器人中的项目,选择绿色项目
文件,打开
选中这个项目加载样本
1选择当前机器人
1机器人样本已加载
2点击按钮,添加焊枪.AFC 文件,由甲方提供
2点击添加按钮
找到伺服枪.AFC文件,打开
重复上述操作,进入该对话框,选择伺服枪文件,加载成功,关闭
右击,添加焊枪和机器人样本
添加对应机器人和焊枪
样本
至此已成功加载机器人和焊枪样本。
双击KUKA文件视图,激活项目,
点击KUKA设备视图项目,打开编辑
器,选择configure …relation
空白处单击,生成小窗口,选择-ll-
符号,从焊枪连接至机器人
连接完成。
选择编辑器,机器参数配置。
单击joint1,生成各参数选择项
将焊枪参数文件上传动比数值输入机器人对应项目菜单下,焊枪配置中,共用几个参数
机器人打开配置-伺服枪-枪参数,
打开当前界面,输入上图中的传动比-10.67,正向开口距离60,反向开口距离20(经验值),保存。
本项目中我们以枪闭合时为枪零点
此时,打开,配置,外部轴,电机/轴传动比项会自动生成新数值,记录
将机器人中显示的数据填入此处,查看电机名牌,写入电机额定转速
写入正负向软件限位开关
来自参数文件,如上面参数纸则写入0.000982,轴启动时间100,发电机。
斜坡,150,电机:M_H_KSP40_400V_V1 伺服:S_H_KSP40_400V_V1,其他参数不变。
KUKA需要提供电机和伺服文件如
在motor中加载电机名称文件,如没
有成功加载,则下载到机器人中时会
出现报错窗口提示
同理,成功加载servofile文件
选择program number
下载完成后,机器人会重新配置,之后,进入配置,安全配置,机器人自动弹出要求重新配置窗口,选择,刚刚激活一个workvisual项目如下图,点是!
注意枪正反方向,如方向不同,可在机器人示教器中枪参数栏,把传动比数值取反!!
以上是我们在配置枪时,要用到的数据。
如果是要一个机器人配置两把枪,类同
在此位置多添加一个枪文件,和配单
个枪一样的方法配置第二个枪的参
数,注意根据现场情况,确定哪个为
1号枪,输入对应参数,哪个为2号
枪,输入对应参数。
成功下载后,在
机器上会有对应的第2把枪的选项,
注意执行测试程序时,选择对应枪
号。
我们在配置中也出点问题,按《KST_ServoGun_TC_40_en.pdf》说明书26页上说的,在eg_extern.dat 文件中改变几个参数后,机器人就可以成功识别2号枪了,可我们更改后没有成功,我们便把KUKA 搞好的一个成功案例拿来更改对应焊枪参数后,下入机器人即完成,没有找出KUKA人更改了哪些东西。
--- 梅森,杨晨,2013,3,20。